- 1ueditor java xss_富文本编辑器防止xss注入javascript版
- 2linux解压进度的命令,带进度条的tar 压缩命令
- 3日志处理 三:Filter+自定义注解实现 系统日志跟踪功能_filter获取请求的自定义注解
- 4Android手机刷机介绍_安卓 线刷 formatall
- 5org.postgresql.util.PSQLException: ERROR: invalid byte sequence for encoding “UTF8“: 0x00
- 6一文教你如何将Eclipse项目导入到IDEA运行_eclipse项目导入idea
- 7Three.js 地图三维可视化 JavaScript_threejs三维地图可视化
- 8知识图谱1-序列标注:BiLSTM-CRF模型做基于字的中文命名实体识别_bilstm-crf 分词
- 9【北邮国院大三下】Logistics and Supply Chain Management 物流与供应链管理 Week2_outline the major steps of a storage capacity plan
- 10GPT实战系列-ChatGLM2部署Ubuntu+Cuda11+显存24G实战方案_chatgml2微调 ubuntu
轩辕实验室丨欧盟EVITA项目预研 第一章(三)_轩辕实验室 博客
赞
踩
本文主要介绍车载通信的安全协议、对结构和协议的验证方法和攻击分析,以及模型驱动的安全工程的相关内容。
本文来自本实验室龚思陈的读书笔记
车载信息安全协议
-
抽象网络结构如下:

-
在实体网联汽车上对应如下:

- EBCM:Electronic Brake Control Module电子制动控制模块

-
外部通信
- 目标车是一个黑盒
-
对新应用的新的安全要求:
- 采用虚拟化方法
- 屏蔽执行环境
- 允许第三方设施和应用加入的开放的环境
- 访问控制
-
EVITA的车载协议
-
原则:
-
对依赖外部数据的应用程序建立信任;
-
基于以下两类加密材料
- 受保护而不会遭到攻击的
- 已被外部信任的第三方证实的
-
基于整个汽车平台的完整性
-
设计目标(Design Goals):
-
高效的-用于安全的开销小
-
可扩展的-ECU的数量
-
网络无关的-可用于CAN,FlexRay,Ethernet等
-
可移植的-适用于不同的运行环境(RTE)
-
方法:
-
面向服务的分层协议设计
-
基于仿真模拟的费用估计
-
结合对称加密和非对称加密
-
内部通信(ECU之间)
-
一对多的安全通信

- 在ECU/HSM处实现基础使用控制
- 在KeyMaster处实现全面的访问控制
-
数据的传递和处理

- 使用“通信传输协议”以确保在不同的总线上启用通信和路由
-
安全会话
-
通用传输协议(CTP,the Common Transport Protocol)提供:
- 发送者地址和发送终点地址
- 较大的有效载荷
-
在通用传输协议的基础上,EVITA项目额外提供以下:
- 安全有效载荷
- 一对多通信
结构和协议的验证方法和攻击分析
-
车载系统
-
ECU(电子控制单元)=硬件元件的集合
- 执行元素(CPU,HWA)
- 通信元素(总线)
- 存储元素(RAM,flash)
- 输入输出设备(传感器、制动器)
-
软件元件
- 在CPU上执行
-
安全属性的证明(EVITA的目标之一):整体的方法论
-
需求识别
-
结构规范
-
安全相关的协议规范
-
整个系统安全性能的验证包括:
1) 性能测评
评价安全机制对系统性能的影响
2) 攻击分析
a.放大视图法
- 从EVITA结构中的一个子区域中得出安全性能的依据
b.全局合成法
- 用实施在子元素上的证明方法去证实对整个系统的要求
-
验证方法
- 考虑输入(如:EVITA的可交付成果)
- 建模:用统一建模语言建模(如:SysML,UML)
- 仿真分析
- 形式化验证
-
整体概览

TTool
-
主要特征
-
开放源码的统一建模语言(UML)工具包
-
支持UML2 profiles(数据建模)
- 当下支持8个UML profile
如:TURTLE,DIPLODOCUS
-
大部分用Java编程
- 使用外部工具的编辑器与接口
- 模拟器用C++或SystemC编程
-
形式化验证和仿真的特点
- 向建模者隐藏形式化验证和仿真模拟的复杂性
- 依赖于外部工具
- 使用按钮(Press-button)
-
TTool的例子:TURTLE和DIPLODOCUS
-
DIPLODOCUS——性能测评的方法论
-
主要特征
- 数据抽象
- 形式化语义
- 高速仿真支持
- 完全由开源工具支持(TTool)
-
use cases:主动制动(active brake)
-
C2C之间传递的信息:
- 即将发生碰撞的危险警告
- 即时制动操纵
-
在通信单元接收并校验了的信息
-
对底盘安全控制器的合理性检查
- 如果刹车是最好的解决方案,那么刹车指令将被发送到刹车控制单元
-
动力总成控制器也获知了这条指令以减速
- 刹车的信息可能会被传递到邻近的车
-
建模与制图


-
一些仿真的结果
- CPU和硬件加速器
| CPU | Load | Contention delay |
| Load_Emulation | 0.15711 | 29973 |
| CPU_CU | 0.11244 | 0 |
| HSM_CU | 0.11939 | 0 |
| CPU_BCU | 0.00010 | 6806 |
| HSM_BCU | 0.00004 | 0 |
| CPU_PTC | 0.00018 | 0 |
| CPU_ChassisSensor | 0.00035 | 200000 |
| CPU_EnvSensor | 0.01115 | 5818 |
| HSM_CSC | 0.11827 | 0 |
| … | … | … |
- 总线
| Bus | Load |
| BCU_local_Bus | 0.00017 |
| CSC_local_Bus | 0.56926 |
| PTC_local_Bus | 0.00026 |
| CU_local_Bus | 0.55783 |
| CU_SOC_Bus | 0.78811 |
| Main_CAN | 0.71469 |
| CSC_SOC_bus | 0.74216 |
| … | … |
-
TURTLE——攻击分析的方法论
-
简介
- 针对带有时间约束的嵌入式系统
- 3个子概要(sub-profiles):分析、设计、部署
- 形式化验证和仿真
- TURTLR设计=类图+一组活动图
-
主要特征
- 非确定性的运算
->选择,延迟
- 完全由开源工具包支持(TTool)
-
主要原则
1、建模元素
-
ECU里的硬件元件
a. HSM
b. 通信网络
-
软件元件
a.涉及ECU的协议栈
2、对安全性能的证明
-
用观察的技巧
-
运用模型检查的方法来搜索给定的操作
-
用CADP进行形式化验证
-
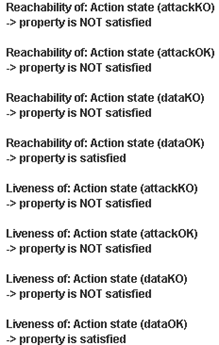
验证方法
- 用CADP产生可达图
- 最小化可达图
- 搜索包含attackOK和attackKO操作的轨迹
-
可达图(Reachability graph)

-
用UPPAAL进行形式化验证
-
验证方法
- 在UML模型中选择感兴趣的操作
- 自动调用UPPAAL
- 搜索已选中操作的可访问性和活性
-
待探测的网络

-
无法被探测的网络
-
总能被探测的网络

-
总结
1) 为嵌入式系统的设计和验证完全集成的环境
-
基于UML/SysML,开源工具包(TTool)
-
形式化验证可以解决:
- 安全性和安全属性
->实现对真实性、保密性、新鲜度的验证
- 功能属性和非功能属性
2) 回顾方法论的阶段
-
捕捉需求(SysML,DIPLPDPCUS)
- 攻击树,需求的定义和组织
-
性能测评(DIPLODOCUS)
-
攻击分析,放大视图法(TURTLE)
模型驱动的安全工程方法
-
什么是模型驱动的工程?
- 专注于创建模型或抽象的软件开发方法。例如:基于对象建模组(UML)的模型驱动架构。
-
将模型从抽象细化为具体:
- 计算无关模型(CIM)→平台无关模型(PIM)→平台相关模型(PSM)

-
智能汽车中的模型驱动工程:AUTOSAR的方法论

-
安全工程的形式化方法
- 形式模型检查,一种安全验证技术。
- 尝试为安全属性提供正式定义。
- 允许对安全属性进行推理,而不会出现误解的问题
-
形式化方法的语言非常复杂:
- 假设S是一个满足precede(x,b)的体系,设B为系统的行为。那么,如果动作w∈B且b∈alph(w),那么x∈alph(w).
- 进而,如果precede(a,x)在体系S中成立,那么,如果w∈B,x∈alph(w),则a∈alph(w).
- 因此,我们得出:当b∈alph(w)时,a∈alph(w),即precede(a,b)在S体系中成立。
-
便于理解的图示:

即,precede(x,y)具有传递性
-
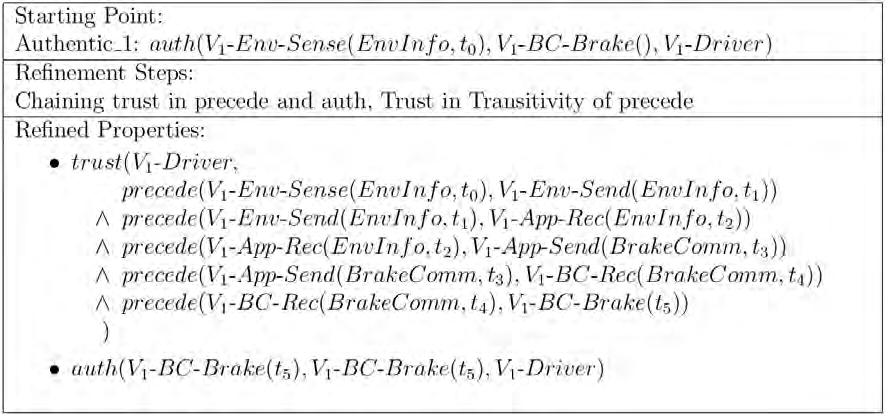
具体的安全工程的进程
-
agent的缩写
| V0 | sensing Vehicle |
| V1 | braking Vehicle |
| Env | Environment-Sensor |
| Cha | Chassis-Sensor |
| App | Application-ECU |
| CU | Communication Unit |
| HMI | Human-Machine-Interface |
| BC | Brake Controller |
| D | Driver of V1 |
-
数据的缩写
| Pos | Position-Information |
| EnvInfo | Environment-Information |
| VeDy | Vehicle-Dynamics |
| CAM | Car2x-Awareness-Message |
| LDW | Local-Danger-Warning-Message |
| Warn | Driver-Warning-Message |
抽象化成流程图:
-
进程1:

-
进程2: