
- 1make a vcard/vcal Ndef message on Android_text/x-vcard
- 21.《一个物联网系统的实现》之使用微信小程序给ESP32C3配网_物联网小程序 教程
- 3vnc viewer 远程桌面,vnc viewer 远程桌面使用教程
- 4细粒度识别 DCL 论文及代码学习笔记_细粒度目标识别
- 5鸿蒙系统开发教程提纲_鸿蒙开发课程大纲
- 6关于 Qt报错“No rule to make target xxxx 长路径”一种非常规问题定位(原因:shadow全路径+深度模块依赖相对路径超过系统预定义256字节) 的解决方法_qt没有规则可制作目标
- 7安卓项目报错了Connect timed out_android connect timed out
- 8意图识别bert_bert隐式意图判断
- 9linux暑期实践1-字符界面与常用命令_尝试在字符界面用ls命令查询新建文件夹
- 10用灰度发布功能实现A/B测试_a/b测试 灰度落地方案
视觉slam学习|基础篇01_slam入门
赞
踩
系列文章目录
SLAM基础篇01
SLAM基础篇02
前言
最近在看高翔和张涛写的《视觉SLAM十四讲》,记录一下学习的内容,方便以后复习。这一系列文章更像是这本书的读书笔记,所以结构脉络都与该书相似;更推荐有时间的同学去看原书,写的更加详细易懂。欢迎大家一起探讨学习视觉SLAM相关的知识。
SLAM是干什么的?
SLAM(simultaneous localization and mapping)全称即时定位与地图构建或并发建图与定位),顾名思义可以解决“定位”和“建图“两件事情。 SLAM 问题的本质:对运动主体自身和周围环境空间不确定性的估计。主流的slam技术应用有两种,分别是激光slam(基于激光雷达lidar 来建图导航)和视觉slam(vslam,基于单/双目摄像头视觉建图导航)。
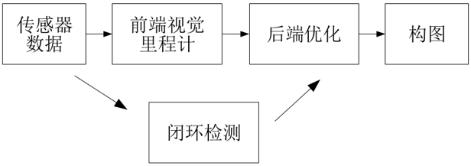
经典的视觉 SLAM 框架是过去十几年内,研究者们总结的成果。这个框架本身,以及它所包含的算法已经基本定型,并且在许多视觉程序库和机器人程序库中已经提供。依靠这些算法,我们能够构建一个视觉 SLAM 系统,使之在正常的工作环境里实时进行定位与建图。如上图所示,我们八视觉slam分为几步:
- 传感器信息读取。在视觉 SLAM 中主要为相机图像信息的读取和预处理。如果在机器人中,还可能有码盘、惯性传感器等信息的读取和同步。
- 视觉里程计 (Visual Odometry, VO)。视觉里程计任务是估算相邻图像间相机的运动,以及局部地图的样子。VO 又称为前端(Front End)。过视觉里程计来估计轨迹,将不可避免地出现累计漂移(Accumulating Drift)。这是由于视觉里程计(在最简单的情况下)只估计两个图像间运动造成的。我们知道,每次估计都带有一定的误差,而由于里程计的工作方式,先前时刻的误差将会传递到下一时刻,导致经过一段时间之后,估计的轨迹将不再准确。为了解决漂移问题,我们还需要两种技术:后端优化和回环检测。回环检测负责把“机器人回到原始位置”的事情检测出来,而后端优化则根据该信息,校正整个轨迹的形状。
- 后端优化(Optimization)。后端接受不同时刻视觉里程计测量的相机位姿,以及回环检测的信息,对它们进行优化,得到全局一致的轨迹和地图。由于接在 VO 之后,又称为后端(Back End)。。后端优化要考虑的问题,
就是如何从这些带有噪声的数据中,估计整个系统的状态,以及这个状态估计的不确定性有多大——这称为最大后验概率估计(Maximum-a-Posteriori,MAP)。 - 回环检测(Loop Closing)。回环检测判断机器人是否曾经到达过先前的位置。如果检测到回环,它会把信息提供给后端进行处理。通
- 建图(Mapping)。它根据估计的轨迹,建立与任务要求对应的地图。地图的形式随SLAM的应用场合而定。大体上讲,它们可以分为度量地图与拓扑地图两种。度量地图强调精确地表示地图中物体的位置关系,通常我们用稀疏(Sparse)与稠密(Dense)对它们进行分类。相比于度量地图的精确性,拓扑地图则更强调地图元素之间的关系。拓扑地图是一个图(Graph),由节点和边组成,只考虑节点间的连通性,例如A,B点是连通的,而不考虑如何从A点到达B点的过程。
SLAM的数学建模
由于相机通常是在某些时刻采集数据的,所以我们也只关心这些时刻的位置和地图。这就把一段连续时间的运动变成了离散时刻 t = 1, . . . , K 当中发生的事情。在这些时刻,用
x
\bm{x}
x 表示小萝卜自身的位置。于是各时刻的位置就记为 x1, . . . , xK,它们构成了机器人的轨迹。地图方面,我们设地图是由许多个路标(Landmark)组成的,而每个时刻,传感器会测量到一部分路标点,得到它们的观测数据。不妨设路标点一共有 N 个,用 y1, . . . , yN表示它们。
机器人的运动方程可用下式表示:
x
k
=
f
(
x
k
−
1
,
u
k
,
w
k
)
\boldsymbol{x}_{k}=f\left(\boldsymbol{x}_{k-1}, \boldsymbol{u}_{k}, \boldsymbol{w}_{k}\right)
xk=f(xk−1,uk,wk)
其中,
u
k
u_k
uk是运动传感器的读数,
w
k
w_k
wk为噪声。
机器人的观测方程可用下式表示:
z
k
,
j
=
h
(
y
j
,
x
k
,
v
k
,
j
)
\boldsymbol{z}_{k, j}=h\left(\boldsymbol{y}_{j}, \boldsymbol{x}_{k}, \boldsymbol{v}_{k, j}\right)
zk,j=h(yj,xk,vk,j)
这里,
v
k
,
j
v_{k,j}
vk,j是这次观测的噪声。
这两个方程描述了最基本的 SLAM 问题:当我们知道运动测量的读数 u,以及传感器的读数 z 时,如何求解定位问题(估计 x)和建图问题(估计 y)?这时,我们把 SLAM问题建模成了一个状态估计问题:如何通过带有噪声的测量数据,估计内部的、隐藏着的状态变量?
机器人学基础
齐次矩阵
在机器人学中,我们习惯用一个坐标系来表达一个刚体的位姿,机器人的位置和姿态,其实就是机器人坐标系在世界坐标系的表达。我们使用齐次矩阵T来表达两个坐标系的变换关系,很显然其次矩阵T应该包括旋转和平移两个部分。
对于刚体的旋转,我们使用旋转矩阵
R
\boldsymbol R
R表示,她是一个行列式为1的正交矩阵。
我们可以吧旋转矩阵的的集合定义如下:
S
O
(
n
)
=
{
R
∈
R
n
×
n
∣
R
R
T
=
I
,
det
(
R
)
=
1
}
.
S O(n)=\left\{R \in \mathbb{R}^{n \times n} \mid R R^{T}=I, \operatorname{det}(R)=1\right\} .
SO(n)={R∈Rn×n∣RRT=I,det(R)=1}.
S O ( n ) S O(n) SO(n) 是特殊正交群 (Special Orthogonal Group) 的意思。“群” 的内容等会儿还会再说。这个集合由 n n n 维空间的旋转矩阵组成, 特别的, S O ( 3 ) S O(3) SO(3) 就是三维空间的旋转 了。通过旋转矩阵, 我们可以直接谈论两个坐标系之间的旋转变换, 而不用再从基开始谈 起了。换句话说, 旋转矩阵可以描述刚体的旋转。
对于刚体的平移,我们可以用一个平移向量
t
\boldsymbol t
t来表示。那么把向量
a
\boldsymbol a
a移动到
a
′
\boldsymbol a^{\prime}
a′,可以表达为:
a
′
=
R
a
+
t
a^{\prime}=R a+t
a′=Ra+t
对于上面的这个式子,我们用矩阵的形式表达出来就是:
[
a
′
1
]
=
[
R
t
0
T
1
]
[
a
1
]
≜
T
[
a
1
]
\left[
这里把我们向量的末尾加了一个“1”,变成了四维齐次坐标。这个T就是所谓的齐次变换矩阵,它有比较特殊的结构:左上为旋转矩阵,右侧为平移向量。左下为向量,右下为1。这种矩阵又称为特殊欧式群(Special Euclidean Group)
S
E
(
3
)
=
{
T
=
[
R
t
0
T
1
]
∈
R
4
×
4
∣
R
∈
S
O
(
3
)
,
t
∈
R
3
}
.
S E(3)=\left\{T=\left[
与
S
O
(
3
)
S O(3)
SO(3) 一样, 求解该矩阵的逆表示一个反向的变换:
T
−
1
=
[
R
T
−
R
T
t
0
T
1
]
.
T^{-1}=\left[
这里额外补充一点向量外积的知识:对于向量
a
,
b
∈
R
3
\boldsymbol a, \boldsymbol b \in \mathbb{R}^{3}
a,b∈R3,外积可以表达为:
a
×
b
=
[
i
j
k
a
1
a
2
a
3
b
1
b
2
b
3
]
=
[
a
2
b
3
−
a
3
b
2
a
3
b
1
−
a
1
b
3
a
1
b
2
−
a
2
b
1
]
=
[
0
−
a
3
a
2
a
3
0
−
a
1
−
a
2
a
1
0
]
b
≜
a
∧
b
.
a \times b=\left[
a
×
b
=
∥
a
∥
∥
b
∥
sin
(
θ
)
n
\boldsymbol {a} \times \boldsymbol {b}=\|\boldsymbol {a}\|\|\boldsymbol {b}\| \sin (\theta) \boldsymbol {n}
a×b=∥a∥∥b∥sin(θ)n
外积的方向垂直于这两个向量, 大小为
∣
a
∣
∣
b
∣
sin
⟨
a
,
b
⟩
|a||b| \sin \langle a, b\rangle
∣a∣∣b∣sin⟨a,b⟩, 是两个向量张成的四边形的 有向面积。对于外积, 我们引入了
∧
\wedge
∧ 符号, 把
a
a
a 㝍成一个矩阵。事实上是一个反对称矩阵 (Skew-symmetric), 你可以将
∧
{ }^{\wedge}
∧ 记成一个反对称符号。这样就把外积
a
×
b
a \times b
a×b, 写成了矩阵 与向量的乘法
a
∧
b
a^{\wedge} b
a∧b, 把它变成了线件运算。这个符号将在后文经常用到, 请记住它。
外积只对三维向量存在定义, 我们还能用外积表示向量的旋转。根据右手法则,从向量a转到向量b,转动轴的方向其实就是a和b外积的方向,大小由a和b的夹角决定。
关于旋转的表示:旋转向量、欧拉角、四元数
关于刚体旋转的表示,除了上面介绍的旋转矩阵,但是旋转矩阵用9个量来表示一个三自由度的旋转,显然有些冗余,其次旋转矩阵自身带有约束,必须是行列式为1的旋转矩阵,这对我们以后的估计和优化会带来非常大的麻烦。因此有必要介绍其他的表示方法。
旋转向量
之前在介绍外积的时候提到说外积可以表示向量间的旋转。其实任意的旋转都可以用一个旋转轴和一个旋转角表示。因此我们定义一个旋转向量,其方向与旋转轴一致,长度等于旋转角。这里的旋转向量其实就是下面要接杀的李代数。对于一个旋转轴为
n
\boldsymbol n
n, 角度为
θ
\theta
θ 的旋转, 显然, 它对应的旋转向 量为
θ
n
\theta \boldsymbol n
θn 。由旋转向量到旋转矩阵的过程由罗德里格斯公式 (Rodrigues’s Formula) 表明, 由于推导过程比较复杂, 我们不作描述, 只给出转换的结果
R
=
cos
θ
I
+
(
1
−
cos
θ
)
n
n
T
+
sin
θ
n
∧
.
\boldsymbol R=\cos \theta \boldsymbol{I}+(1-\cos \theta) \boldsymbol n \boldsymbol n^{T}+\sin \theta \boldsymbol{n}^{\wedge} .
R=cosθI+(1−cosθ)nnT+sinθn∧.
这里,符号
∧
^{\wedge}
∧ 是向量到反对称的转换符,前面介绍向量外积的时候有提到。
当然我们也可以从旋转矩阵计算旋转向量和转角:
θ
=
arccos
(
tr
(
R
)
−
1
2
)
.
\theta=\arccos \left(\frac{\operatorname{tr}(\boldsymbol{R})-1}{2}\right) .
θ=arccos(2tr(R)−1).
R
n
=
n
\boldsymbol R \boldsymbol n = \boldsymbol n
Rn=n
转轴
n
\boldsymbol n
n是矩阵R特征值1对应的特征向量。求解此方程,再归一化就可得到旋转轴。
欧拉角
欧拉角当中比较常用的一种,便是用“偏航-俯仰-滚转”(yaw-pitch-roll)三个角度来描述一个旋转的。由于它等价于 ZY X 轴的旋转,我们就以 ZY X 为例。
假设一个刚体的前方(朝向我们的方向)为X 轴,右侧为 Y 轴,上方为 Z 轴,见下图 。那么,ZY X 转角相当于把任意旋转分解成以下三个轴上的转角:
- 绕物体的 Z 轴旋转,得到偏航角 yaw;
- 绕旋转之后的 Y 轴旋转,得到俯仰角 pitch;
- 绕旋转之后的 X 轴旋转,得到滚转角 roll。
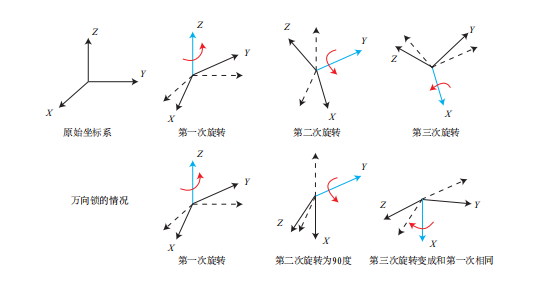
此时,我们可以使用 [r, p, y]T 这样一个三维的向量描述任意旋转。这个向量十分的直观,我们可以从这个向量想象出旋转的过程。但是欧拉角的一个重大缺点是会碰到著名的万向锁问题(Gimbal Lock①):在俯仰角为±90◦ 时,第一次旋转与第三次旋转将使用同一个轴,使得系统丢失了一个自由度(由三次旋转变成了两次旋转)。这被称为奇异性问题,理论上可以证明,只要我们想用三个实数来表达三维旋转时,都会不可避免地碰到奇异性问题。由于这种原理,欧拉角不适于插值和迭代,往往只用于人机交互中。
四元数
事实上,我们找不到不带奇异性的三维向量描述方式 。这有点类似于,当我们想用两个坐标表示地球表面时(如经度和纬度),必定存在奇异性(纬度为 ±90◦ 时经度无意义)。三维旋转是一个三维流形,想要无奇异性地表达它,用三个量是不够的。
回忆我们以前学习过的复数。我们用复数集
C
\mathbb C
C 表示复平面上的向量,而复数的乘法则能表示复平面上的旋转:例如,乘上复数 i 相当于逆时针把一个复向量旋转 90 度。类似的,在表达三维空间旋转时,也有一种类似于复数的代数:四元数(Quaternion)。四元数是 Hamilton 找到的一种扩展的复数. 它既是紧凑的,也没有奇异性。
一个四元数
q
q
q 拥有一个实部和三个虚部, 像这样:
q
=
q
0
+
q
1
i
+
q
2
j
+
q
3
k
,
q=q_{0}+q_{1} i+q_{2} j+q_{3} k,
q=q0+q1i+q2j+q3k,
其中
i
,
j
,
k
i, j, k
i,j,k 为四元数的三个虚部。这三个虚部满足关系式:
{
i
2
=
j
2
=
k
2
=
−
1
i
j
=
k
,
j
i
=
−
k
j
k
=
i
,
k
j
=
−
i
k
i
=
j
,
i
k
=
−
j
\left\{
由于它的这种特殊表示形式,有时人们也用一个标量和一个向量来表达四元数:
q
=
[
s
,
v
]
,
s
=
q
0
∈
R
,
v
=
[
q
1
,
q
2
,
q
3
]
T
∈
R
3
,
q=[s, v], \quad s=q_{0} \in \mathbb{R}, v=\left[q_{1}, q_{2}, q_{3}\right]^{T} \in \mathbb{R}^{3},
q=[s,v],s=q0∈R,v=[q1,q2,q3]T∈R3,
这里,
s
s
s 称为四元数的实部, 而
v
v
v 称为它的虚部。如果一个四元数虚部为 0 , 称之为实四 元数。反之, 若它的实部为 0 , 称之为虚四元数。
我们可以用四元数表达对一个点的旋转。假设一个空间三维点
p
=
[
x
,
y
,
z
]
∈
R
3
\boldsymbol p=[x, y, z] \in \mathbb{R}^{3}
p=[x,y,z]∈R3, 以 及一个由轴角
n
,
θ
\boldsymbol n, \theta
n,θ 指定的旋转。三维点
p
\boldsymbol p
p 经过旋转之后变成为
p
′
\boldsymbol p^{\prime}
p′ 。如果使用矩阵描述, 则为
p
′
=
R
p
\boldsymbol p^{\prime} =\boldsymbol R \boldsymbol p
p′=Rp
如果用四元数来描述,首先把三维空间点用一个虚四元数来描述:
p
=
[
0
,
x
,
y
,
z
]
=
[
0
,
v
]
.
\boldsymbol p=[0, x, y, z]=[0, \boldsymbol v] .
p=[0,x,y,z]=[0,v].
这相当于我们把四元数的三个虚部与空间中的三个轴相对应。然后,用四 元数
q
\boldsymbol q
q 表示这个旋转:
q
=
[
cos
θ
2
,
n
sin
θ
2
]
.
\boldsymbol q=\left[\cos \frac{\theta}{2}, \boldsymbol n \sin \frac{\theta}{2}\right] .
q=[cos2θ,nsin2θ].
反之,我们亦可从单位四元数中计算出对应旋转轴与夹角:
{
θ
=
2
arccos
q
0
[
n
x
,
n
y
,
n
z
]
T
=
[
q
1
,
q
2
,
q
3
]
T
/
sin
θ
2
\left\{
对上式的 θ 加上 2π,我们得到一个相同的旋转,但此时对应的四元数变成了 −q。因此,在四元数中,任意的旋转都可以由两个互为相反数的四元数表示。同理,取 θ 为 0,则得到一个没有任何旋转的实四元数。
回到正题, 旋转后的点
p
′
\boldsymbol p^{\prime}
p′ 即可表示为这样的乘积:
p
′
=
q
p
q
−
1
\boldsymbol p^{\prime}=\boldsymbol q \boldsymbol p \boldsymbol q^{-1}
p′=qpq−1
计算结果的实部为 0 , 故为纯虚四元数。其虚部的三个分量表 示旋转后
3
D
3 \mathrm{D}
3D 点的坐标。
设四元数
q
=
q
0
+
q
1
i
+
q
2
j
+
q
3
k
\boldsymbol q=q_{0}+q_{1} i+q_{2} j+q_{3} k
q=q0+q1i+q2j+q3k, 对应的旋转矩阵
R
\boldsymbol R
R 为:
R
=
[
1
−
2
q
2
2
−
2
q
3
2
2
q
1
q
2
+
2
q
0
q
3
2
q
1
q
3
−
2
q
0
q
2
2
q
1
q
2
−
2
q
0
q
3
1
−
2
q
1
2
−
2
q
3
2
2
q
2
q
3
+
2
q
0
q
1
2
q
1
q
3
+
2
q
0
q
2
2
q
2
q
3
−
2
q
0
q
1
1
−
2
q
1
2
−
2
q
2
2
]
\boldsymbol{R}=\left[
反之, 由旋转矩阵到四元数的转换如下。假设矩阵为
R
=
{
m
i
j
}
,
i
,
j
∈
[
1
,
2
,
3
]
\boldsymbol R=\left\{m_{i j}\right\}, i, j \in[1,2,3]
R={mij},i,j∈[1,2,3], 其对 应的四元数
q
q
q 由下式给出:
q
0
=
tr
(
R
)
+
1
2
,
q
1
=
m
23
−
m
32
4
q
0
,
q
2
=
m
31
−
m
13
4
q
0
,
q
3
=
m
12
−
m
21
4
q
0
.
q_{0}=\frac{\sqrt{\operatorname{tr}(R)+1}}{2}, q_{1}=\frac{m_{23}-m_{32}}{4 q_{0}}, q_{2}=\frac{m_{31}-m_{13}}{4 q_{0}}, q_{3}=\frac{m_{12}-m_{21}}{4 q_{0}} .
q0=2tr(R)+1
,q1=4q0m23−m32,q2=4q0m31−m13,q3=4q0m12−m21.
值得一提的是, 由于
q
\boldsymbol q
q 和
−
q
-\boldsymbol q
−q 表示同一个旋转, 事实上一个
R
\boldsymbol R
R 对应的四元数表示并 不是惟一的。同时, 除了上面给出的转换方式之外, 还存在其他几种计算方法, 而本书都 省略了。实际編程中| 当
q
0
q_{0}
q0 接近 0 时, 其余三个分量会非常大, 导致解不稳定, 此时我们] 再考虑使用其他的方式进行转换。
李群和李代数基础
李群
前面介绍过,三位旋转矩阵构成了特殊正交群SO(3),而变换矩阵构成了特殊欧式群SE(3)。我们可以观察到这两个"群"对于加法不封闭,二对于乘法封闭,换句话说就是:
R
1
+
R
2
∉
S
O
(
3
)
,
R
1
R
2
∈
S
O
(
3
)
,
R_{1}+R_{2} \notin S O(3),R_{1} R_{2} \in S O(3),
R1+R2∈/SO(3),R1R2∈SO(3),
我们首先介绍群(Group)的概念:是一种集合加上一种运算的代数结构。我们把集合记作
A
A
A, 运算记作 . , 那么群可以记作
G
=
(
A
,
⋅
)
G=(A, \cdot)
G=(A,⋅) 。群要求这个运算满足以下几个条件:
- 封闭性: ∀ a 1 , a 2 ∈ A , a 1 ⋅ a 2 ∈ A \forall a_{1}, a_{2} \in A, \quad a_{1} \cdot a_{2} \in A ∀a1,a2∈A,a1⋅a2∈A.
- 结合律: ∀ a 1 , a 2 , a 3 ∈ A , ( a 1 ⋅ a 2 ) ⋅ a 3 = a 1 ⋅ ( a 2 ⋅ a 3 ) \forall a_{1}, a_{2}, a_{3} \in A, \quad\left(a_{1} \cdot a_{2}\right) \cdot a_{3}=a_{1} \cdot\left(a_{2} \cdot a_{3}\right) ∀a1,a2,a3∈A,(a1⋅a2)⋅a3=a1⋅(a2⋅a3).
- 么元: ∃ a 0 ∈ A \exists a_{0} \in A ∃a0∈A, s.t. ∀ a ∈ A , a 0 ⋅ a = α ⋅ a 0 = α \forall a \in A, \quad a_{0} \cdot a=\alpha \cdot a_{0}=\alpha ∀a∈A,a0⋅a=α⋅a0=α.
- 逆: ∀ a ∈ A , ∃ a − 1 ∈ A \forall a \in A, \quad \exists a^{-1} \in A ∀a∈A,∃a−1∈A, s.t. a ⋅ a − 1 = a 0 a \cdot a^{-1}=a_{0} a⋅a−1=a0.
矩阵中常见的群有:
- 一般线性群 GL(n) 指 n × n 的可逆矩阵,它们对矩阵乘法成群。
- 特殊正交群 SO(n) 也就是所谓的旋转矩阵群,其中 SO(2) 和SO(3) 最为常见。
- 特殊欧氏群 SE(n) 也就是前面提到的 n 维欧氏变换,如 SE(2) 和 SE(3)。
李群是指具有连续(光滑)性质的群。像整数群 Z 那样离散的群没有连续性质,所以不是李群。而 SO(n) 和 SE(n),它们在实数空间上是连续的。我们能够直观地想象一个刚体能够连续地在空间中运动,所以它们都是李群。
李代数
考虑任意旋转矩阵R,有
R
R
T
=
I
.
R R^{T}=I .
RRT=I.
在等式两边对时间求导, 得到:
R
˙
(
t
)
R
(
t
)
T
+
R
(
t
)
R
˙
(
t
)
T
=
0.
\dot{\boldsymbol{R}}(t) \boldsymbol{R}(t)^{T}+\boldsymbol{R}(t) \dot{\boldsymbol{R}}(t)^{T}=0 .
R˙(t)R(t)T+R(t)R˙(t)T=0.
整理得:
R
˙
(
t
)
R
(
t
)
T
=
−
(
R
˙
(
t
)
R
(
t
)
T
)
T
.
\dot{\boldsymbol{R}}(t) \boldsymbol{R}(t)^{T}=-\left(\dot{\boldsymbol{R}}(t) \boldsymbol{R}(t)^{T}\right)^{T} .
R˙(t)R(t)T=−(R˙(t)R(t)T)T.
这里我们引入符号
∨
^{\vee}
∨,它与符号
∧
^{\wedge}
∧正相反,可以将反对称矩阵变成与之对应的向量。即
a
∧
=
A
=
[
0
−
a
3
a
2
a
3
0
−
a
1
−
a
2
a
1
0
]
,
A
∨
=
a
.
\boldsymbol{a}^{\wedge}=\boldsymbol{A}=\left[
于是, 由于
R
˙
(
t
)
R
(
t
)
T
\dot{R}(t) \boldsymbol{R}(t)^{T}
R˙(t)R(t)T 是一个反对称矩阵, 我们可以找到一个三维向量
ϕ
(
t
)
∈
R
3
\phi(t) \in \mathbb{R}^{3}
ϕ(t)∈R3 与 之对应。于是有:
R
˙
(
t
)
R
(
t
)
T
=
ϕ
(
t
)
∧
.
\dot{\boldsymbol{R}}(t) \boldsymbol{R}(t)^{T}=\phi(t)^{\wedge} .
R˙(t)R(t)T=ϕ(t)∧.
等式两边右乘
R
(
t
)
R(t)
R(t), 由于
R
R
R 为正交阵, 有:
R
˙
(
t
)
=
ϕ
(
t
)
∧
R
(
t
)
=
[
0
−
ϕ
3
ϕ
2
ϕ
3
0
−
ϕ
1
−
ϕ
2
ϕ
1
0
]
R
(
t
)
.
\dot{\boldsymbol{R}}(t)=\phi(t)^{\wedge} \boldsymbol{R}(t)=\left[
可以看到, 每对旋转矩阵求一次导数, 只需左乘一个
ϕ
∧
(
t
)
\phi^{\wedge}(t)
ϕ∧(t) 矩阵即可。为方便讨论, 我 们设
t
0
=
0
t_{0}=0
t0=0, 并设此时旋转矩阵为
R
(
0
)
=
I
\boldsymbol{R}(0)=\boldsymbol{I}
R(0)=I 。按照导数定义, 可以把
R
(
t
)
\boldsymbol{R}(t)
R(t) 在 0 附近进行 一阶泰勒展开:
R
(
t
)
≈
R
(
t
0
)
+
R
˙
(
t
0
)
(
t
−
t
0
)
=
I
+
ϕ
(
t
0
)
∧
(
t
)
.
我们看到
ϕ
\phi
ϕ 反应了
R
\boldsymbol{R}
R 的导数性质, 故称它在
S
O
(
3
)
S O(3)
SO(3) 原点附近的正切空间 (Tangent Space) 上。同时在
t
0
t_{0}
t0 附近, 设
ϕ
\phi
ϕ 保持为常数
ϕ
(
t
0
)
=
ϕ
0
\phi\left(t_{0}\right)=\phi_{0}
ϕ(t0)=ϕ0 。则有
R
˙
(
t
)
=
ϕ
(
t
0
)
∧
R
(
t
)
=
ϕ
0
∧
R
(
t
)
.
\dot{R}(t)=\phi\left(t_{0}\right)^{\wedge} \boldsymbol{R}(t)=\phi_{0}^{\wedge} \boldsymbol{R}(t) .
R˙(t)=ϕ(t0)∧R(t)=ϕ0∧R(t).
上式是一个关于
R
R
R 的微分方程, 而且我们知道初始值
R
(
0
)
=
I
R(0)=I
R(0)=I, 解之, 得:
R
(
t
)
=
exp
(
ϕ
0
∧
t
)
.
R(t)=\exp \left(\phi_{0}^{\wedge} t\right) .
R(t)=exp(ϕ0∧t).
每个李群都有与之对应的李代数。李代数描述了李群的局部性质。通用的李代数的定 义如下:
李代数由一个集合
V
\mathbb{V}
V, 一个数域
F
\mathbb{F}
F 和一个二元运算 [,] 组成。如果它们满足以下几条 性质, 称
(
V
,
F
,
[
,
]
(\mathbb{V}, \mathbb{F},[,]
(V,F,[,], 为一个李代数, 记作
g
\mathfrak{g}
g 。
- 尌闭性 ∀ X , Y ∈ V , [ X , Y ] ∈ V \forall X, Y \in \mathbb{V},[X, Y] \in \mathbb{V} ∀X,Y∈V,[X,Y]∈V.
- 双线性
∀
X
,
Y
,
Z
∈
V
,
a
,
b
∈
F
\forall \boldsymbol{X}, \boldsymbol{Y}, \boldsymbol{Z} \in \mathbb{V}, a, b \in \mathbb{F}
∀X,Y,Z∈V,a,b∈F, 有:
[ a X + b Y , Z ] = a [ X , Z ] + b [ Y , Z ] , [ Z , a X + b Y ] = a [ Z , X ] + b [ Z , Y ] [a \boldsymbol{X}+b \boldsymbol{Y}, \boldsymbol{Z}]=a[\boldsymbol{X}, \boldsymbol{Z}]+b[\boldsymbol{Y}, \boldsymbol{Z}], \quad[\boldsymbol{Z}, a \boldsymbol{X}+b \boldsymbol{Y}]=a[\boldsymbol{Z}, \boldsymbol{X}]+b[\boldsymbol{Z}, \boldsymbol{Y}] [aX+bY,Z]=a[X,Z]+b[Y,Z],[Z,aX+bY]=a[Z,X]+b[Z,Y] - 自反性 ∀ X ∈ V , [ X , X ] = 0 \quad \forall X \in \mathbb{V},[X, X]=0 ∀X∈V,[X,X]=0.
- 雅可比等价 ∀ X , Y , Z ∈ V , [ X , [ Y , Z ] ] + [ Z , [ Y , X ] ] + [ Y , [ Z , X ] ] = 0 \forall X, Y, Z \in \mathbb{V},[X,[Y, Z]]+[Z,[Y, X]]+[Y,[Z, X]]=0 ∀X,Y,Z∈V,[X,[Y,Z]]+[Z,[Y,X]]+[Y,[Z,X]]=0.
其中二元运算被称为李括号。从表面上来看, 李代数所需要的性质还是拴多的。相比于群中的较为简单的二元运算, 李括号表达了两个元素的差异。它不要求结合律, 而要求 元素和自己做李括号之后为零的性质。作为例子, 三维向量 R 3 \mathbb{R}^{3} R3 上定义的叉积 × \times × 是一种李 括号, 因此 g = ( R 3 , R , × ) \mathfrak{g}=\left(\mathbb{R}^{3}, \mathbb{R}, \times\right) g=(R3,R,×) 构成了一个李代数。读者可以尝试将叉积的性质代入到上面四 条性质中。
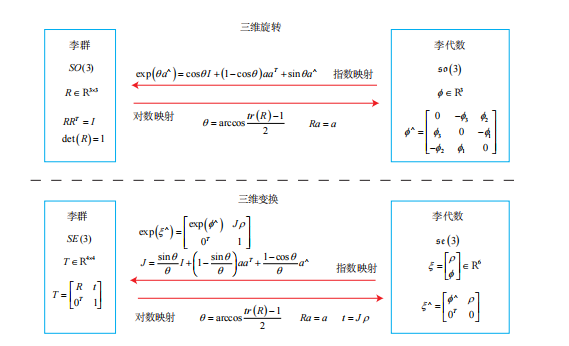
李代数 s o ( 3 ) \mathfrak{s o}(3) so(3)和 s e ( 3 ) \mathfrak{s e}(3) se(3)
之前提到的
ϕ
\phi
ϕ,事实上是一种李代数。SO(3) 对应的李代数是定义在 R3上的向量,我们记作
ϕ
\phi
ϕ。根据前面的推导,每个
ϕ
\phi
ϕ都可以生成一个反对称矩阵
Φ
=
ϕ
∧
=
[
0
−
ϕ
3
ϕ
2
ϕ
3
0
−
ϕ
1
−
ϕ
2
ϕ
1
0
]
∈
R
3
×
3
\Phi=\phi^{\wedge}=\left[
在此定义下, 两个向量
ϕ
1
,
ϕ
2
\phi_{1}, \phi_{2}
ϕ1,ϕ2 的李括号为:
[
ϕ
1
,
ϕ
2
]
=
(
Φ
1
Φ
2
−
Φ
2
Φ
1
)
∨
.
\left[\phi_{1}, \phi_{2}\right]=\left(\Phi_{1} \Phi_{2}-\Phi_{2} \Phi_{1}\right)^{\vee} .
[ϕ1,ϕ2]=(Φ1Φ2−Φ2Φ1)∨.
读者可以去验证该定义下的李括号满足上面的几条性质。由于
ϕ
\phi
ϕ 与反对称矩阵关系很 紧密, 在不引起歧义的情况下, 就说
s
o
(
3
)
\mathfrak{s o}(3)
so(3)的元素是 3 维向量或者 3 维反对称矩阵, 不加 区别:
s
0
(
3
)
=
{
ϕ
∈
R
3
,
Φ
=
ϕ
∧
∈
R
3
×
3
}
.
\mathfrak{s 0}(3)=\left\{\phi \in \mathbb{R}^{3}, \Phi=\phi^{\wedge} \in \mathbb{R}^{3 \times 3}\right\} .
s0(3)={ϕ∈R3,Φ=ϕ∧∈R3×3}.
至此, 我们已消楚了
s
o
(
3
)
\mathfrak{s o}(3)
so(3)的内容。它们是一个由三维向量组成的集合, 每个向量对 应到一个反对称矩阵, 可以表达旋转矩阵的导数。它与
S
O
(
3
)
S O(3)
SO(3) 的关系由指数映射给定:
R
=
exp
(
ϕ
∧
)
.
\boldsymbol{R}=\exp \left(\phi^{\wedge}\right) .
R=exp(ϕ∧).
对于SE(3),他也有对应的李代数
s
e
(
3
)
\mathfrak{s e}(3)
se(3):
s
e
(
3
)
=
{
ξ
=
[
ρ
ϕ
]
∈
R
6
,
ρ
∈
R
3
,
ϕ
∈
s
o
(
3
)
,
ξ
∧
=
[
ϕ
∧
ρ
0
T
0
]
∈
R
4
×
4
}
\mathfrak{s e}(3)=\left\{\xi=\left[
我们把每个
s
e
(
3
)
\mathfrak{s e}(3)
se(3) 元素记作
ξ
\xi
ξ, 它是一个六维向量。前三维为平移, 记作
ρ
\rho
ρ : 后三维为 旋转, 记作
ϕ
\phi
ϕ, 实质上是
s
o
(
3
)
\mathfrak{s o}(3)
so(3) 元素。同时, 我们拓展了
∧
{ }^{\wedge}
∧ 符号的含义。在
s
e
(
3
)
\mathfrak{s e}(3)
se(3) 中, 同 样使用
∧
\wedge
∧ 符号, 将一个六维向量转换成四维矩阵, 但这里不再表示反对称。
指数和对数映射
上文提到了指数矩阵
e
x
p
(
ϕ
∧
)
exp(\phi^{\wedge} )
exp(ϕ∧),在李群和李代数中又称为指数映射。那它到底该如何计算呢?这里我们直接给出结果:
exp
(
θ
a
∧
)
=
cos
θ
I
+
(
1
−
cos
θ
)
a
a
T
+
sin
θ
a
∧
.
\exp \left(\theta a^{\wedge}\right)=\cos \theta \boldsymbol{I}+(1-\cos \theta) \boldsymbol{a a ^ { T }}+\sin \theta \boldsymbol{a}^{\wedge} .
exp(θa∧)=cosθI+(1−cosθ)aaT+sinθa∧.
回忆前一讲内容, 它和罗德里格斯公式, 如出一辑。这表明,
s
o
(
3
)
\mathfrak{s o}(3)
so(3)实际 上就是由所谓的旋转向量组成的空间, 而指数映射即罗德里格斯公式。通过它们, 我们把
s
e
(
3
)
\mathfrak{s e}(3)
se(3)中任意一个向量对应到了一个位于
S
O
(
3
)
S O(3)
SO(3) 中的旋转矩阵。反之, 如果定义对数映射, 我们也能把
S
O
(
3
)
S O(3)
SO(3) 中的元素对应到
s
o
(
3
)
\mathfrak{s o}(3)
so(3) 中:
ϕ
=
ln
(
R
)
∨
=
(
∑
n
=
0
∞
(
−
1
)
n
n
+
1
(
R
−
I
)
n
+
1
)
∨
.
\phi=\ln (\boldsymbol{R})^{\vee}=\left(\sum_{n=0}^{\infty} \frac{(-1)^{n}}{n+1}(\boldsymbol{R}-\boldsymbol{I})^{n+1}\right)^{\vee} .
ϕ=ln(R)∨=(n=0∑∞n+1(−1)n(R−I)n+1)∨.
不过我们通常不按照泰勒展开去计算对数映射。在介绍旋转的表示中,我们已经介绍过如何根据旋转矩阵计算对应的李代数,即利用迹的性质分别求解转角和转轴,采用那种方式更加省事一些。
同理,
s
e
(
3
)
\mathfrak{s e}(3)
se(3) 的指数映射形式如下:
BCH公式
虽然我们已经清楚了 SO(3) 和 SE(3)上的李群与李代数关系,但是,当我们在 SO(3) 中完成两个矩阵乘法时,李代数中
s
0
(
3
)
\mathfrak{s 0}(3)
s0(3) 上发生了什么改变呢?反过来说,当
s
0
(
3
)
\mathfrak{s 0}(3)
s0(3) 上做两个李代数的加法时,SO(3) 上是否对应着两个矩阵的乘积?如果成立的话,相当于:
ln
(
exp
(
A
)
exp
(
B
)
)
=
A
+
B
?
\ln (\exp (A) \exp (B))=A+B ?
ln(exp(A)exp(B))=A+B?
遗憾的是,这个式子对于A,B为标量时成立,但A,B若是矩阵,则不成立。两个李代数指数映射乘积的完整形式,由 Baker-Campbell-Hausdorff 公式(BCH 公式)给出。由于它完整的形式较复杂,我们给出它展开式的前几项:
ln
(
exp
(
A
)
exp
(
B
)
)
=
A
+
B
+
1
2
[
A
,
B
]
+
1
12
[
A
,
[
A
,
B
]
]
−
1
12
[
B
,
[
A
,
B
]
]
+
⋯
\ln (\exp (A) \exp (B))=A+B+\frac{1}{2}[A, B]+\frac{1}{12}[A,[A, B]]-\frac{1}{12}[B,[A, B]]+\cdots
ln(exp(A)exp(B))=A+B+21[A,B]+121[A,[A,B]]−121[B,[A,B]]+⋯
其中[]为李括号。
B
C
H
\mathrm{BCH}
BCH 公式告诉我们, 当处理两个矩阵指数之积时, 它们会产生一些由 李括号组成的余项。特别地, 考虑
S
O
(
3
)
S O(3)
SO(3) 上的李代数
ln
(
exp
(
ϕ
1
∧
)
exp
(
ϕ
2
∧
)
)
∨
\ln \left(\exp \left(\phi_{1}^{\wedge}\right) \exp \left(\phi_{2}^{\wedge}\right)\right)^{\vee}
ln(exp(ϕ1∧)exp(ϕ2∧))∨, 当
ϕ
1
\phi_{1}
ϕ1 或
ϕ
2
\phi_{2}
ϕ2 为小量时, 小量二次以上的项都可以被忽略掉。此时,
B
C
H
\mathrm{BCH}
BCH 拥有线性近似表达:
ln
(
exp
(
ϕ
1
∧
)
exp
(
ϕ
2
∧
)
)
∨
≈
{
J
1
(
ϕ
2
)
−
1
ϕ
1
+
ϕ
2
if
ϕ
1
is small,
J
r
(
ϕ
1
)
−
1
ϕ
2
+
ϕ
1
if
ϕ
2
is small.
\ln \left(\exp \left(\phi_{1}^{\wedge}\right) \exp \left(\phi_{2}^{\wedge}\right)\right)^{\vee} \approx
以第一个近似为例。该式告诉我们,当对一个旋转矩阵
R
2
R_{2}
R2 (李代数为
ϕ
2
\phi_{2}
ϕ2 )左乘一个 微小旋转矩脌
R
1
R_{1}
R1 (李代数为
ϕ
1
\phi_{1}
ϕ1 )时,可以近似地看作,在原在的李代数
ϕ
2
\phi_{2}
ϕ2 上, 加上了一 项
J
l
(
ϕ
2
)
−
1
ϕ
1
J_{l}\left(\phi_{2}\right)^{-1} \phi_{1}
Jl(ϕ2)−1ϕ1 。同理, 第二个近似描述了右乘一个微小位移的情况。于是, 李代数在
B
C
H
\mathrm{BCH}
BCH 近似下,分成了左乘近似和右乘近似两种, 在使用时我们须加注意, 使用的是左乘模型还 是右韭模型。
本书以左乘为例。左乘
B
C
H
\mathrm{BCH}
BCH 近似雅可比:
J
l
=
J
=
sin
θ
θ
I
+
(
1
−
sin
θ
θ
)
a
a
T
+
1
−
cos
θ
θ
a
∧
.
J_{l}=J=\frac{\sin \theta}{\theta} I+\left(1-\frac{\sin \theta}{\theta}\right) a a^{T}+\frac{1-\cos \theta}{\theta} a^{\wedge} .
Jl=J=θsinθI+(1−θsinθ)aaT+θ1−cosθa∧.
它的逆为:
J
l
−
1
=
θ
2
cot
θ
2
I
+
(
1
−
θ
2
cot
θ
2
)
a
a
T
−
θ
2
a
∧
.
J_{l}^{-1}=\frac{\theta}{2} \cot \frac{\theta}{2} I+\left(1-\frac{\theta}{2} \cot \frac{\theta}{2}\right) a a^{T}-\frac{\theta}{2} a^{\wedge} .
Jl−1=2θcot2θI+(1−2θcot2θ)aaT−2θa∧.
而右乘雅可比仅需要对自变量取负号即可:
J
r
(
ϕ
)
=
J
I
(
−
ϕ
)
.
J_{r}(\phi)=J_{I}(-\phi) .
Jr(ϕ)=JI(−ϕ).
这样,我们就可以谈论李群乘法与李代数加法的关系了。假定对某个旋转 R,对应的李代数为 ϕ。我们给它左乘一个微小旋转,记作 ∆R,对应的李代数为 ∆ϕ。那么,在李群上,得到的结果就是 ∆R · R,而在李代数上,根据 BCH近似,为:Jl−1(ϕ)∆ϕ + ϕ。合并起来,可以简单地写成:
exp
(
Δ
ϕ
∧
)
exp
(
ϕ
∧
)
=
exp
(
(
ϕ
+
J
l
−
1
(
ϕ
)
Δ
ϕ
)
∧
)
\exp \left(\Delta \phi^{\wedge}\right) \exp \left(\phi^{\wedge}\right)=\exp \left(\left(\phi+J_{l}^{-1}(\phi) \Delta \phi\right)^{\wedge}\right)
exp(Δϕ∧)exp(ϕ∧)=exp((ϕ+Jl−1(ϕ)Δϕ)∧)
反之, 如果我们在李代数上进行加法, 让一个
ϕ
\phi
ϕ 加上
Δ
ϕ
\Delta \phi
Δϕ, 那么可以近似为李群上带 左右雅可比的乘法:
exp
(
(
ϕ
+
Δ
ϕ
)
∧
)
=
exp
(
(
J
l
Δ
ϕ
)
∧
)
exp
(
ϕ
∧
)
=
exp
(
ϕ
∧
)
exp
(
(
J
r
Δ
ϕ
)
∧
)
\exp \left((\phi+\Delta \phi)^{\wedge}\right)=\exp \left(\left(J_{l} \Delta \phi\right)^{\wedge}\right) \exp \left(\phi^{\wedge}\right)=\exp \left(\phi^{\wedge}\right) \exp \left(\left(\boldsymbol{J}_{r} \Delta \phi\right)^{\wedge}\right)
exp((ϕ+Δϕ)∧)=exp((JlΔϕ)∧)exp(ϕ∧)=exp(ϕ∧)exp((JrΔϕ)∧)
这将为之后李代数上的做微积分提供了理论基础。同样的, 对于
S
E
(
3
)
S E(3)
SE(3), 亦有类似的
B
C
H
\mathrm{BCH}
BCH 近似公式:
exp
(
Δ
ξ
∧
)
exp
(
ξ
∧
)
≈
exp
(
(
J
l
−
1
Δ
ξ
+
ξ
)
∧
)
exp
(
ξ
∧
)
exp
(
Δ
ξ
∧
)
≈
exp
(
(
J
r
−
1
Δ
ξ
+
ξ
)
∧
)
.
这里
J
l
\mathcal{J}_{l}
Jl 形式比较复杂, 它是一个
6
×
6
6 \times 6
6×6 的矩阵, 读者可以参考 [6] 中式
(
7.82
)
(7.82)
(7.82) 和 (7.83) 内容。由于我们在计算中不用到该雅可比, 故这里略去它的实际形式。
李代数求导
在SLAM中,我们经常会构建与位姿有关的函数,然后讨论该函数关于
位姿的导数,以调整当前的估计值。所以讨论李代数的求导非常的重要,但是SO(3),SE(3)上没有良好定义的加法,他们只是群。如果我们把T当成一个普通矩阵来优化处理,那就必须对它加以约束,那就必须对它加以约束。而李代数是由向量组成的,具有良好的加法运算。因此使用李代数解决求导问题的思路分为两种:
- 用李代数表示姿态,然后对根据李代数加法来对李代数求导
- 对李群左乘或右乘微小扰动,然后对该扰动求导,成为左扰动和右扰动模型。
首先,考虑SO(3)的情况,假设对空间点p进行额旋转,得到Rp。宣布在要就算旋转后的点的坐标相对于旋转的导数,我们不严谨的记为:
∂
(
R
p
)
∂
R
\frac{\partial(\boldsymbol{R} \boldsymbol p)}{\partial \boldsymbol{R}}
∂R∂(Rp)
由于
S
O
(
3
)
S O(3)
SO(3) 没有加法, 所以该导数无法按照导数的定义进行计算。设
R
R
R 对应的李代数为
ϕ
\phi
ϕ, 我们转而计算:
∂
(
exp
(
ϕ
∧
)
p
)
∂
ϕ
\frac{\partial\left(\exp \left(\phi^{\wedge}\right) p\right)}{\partial \phi}
∂ϕ∂(exp(ϕ∧)p)
这里同样省略推到过程给出化简后的结果:
∂
(
R
p
)
∂
ϕ
=
(
−
R
p
)
∧
J
l
.
\frac{\partial(\boldsymbol{R} \boldsymbol p)}{\partial \phi}=(-\boldsymbol{R} \boldsymbol p)^{\wedge} \boldsymbol{J}_{l} .
∂ϕ∂(Rp)=(−Rp)∧Jl.
不过,由于这里仍然含有形式比较复杂的
J
l
J_l
Jl,我们不太希望计算它。而下面要讲的扰动模型则提供了更简单的导数计算方式。
扰动模型
另一种求导方式, 是对
R
\boldsymbol{R}
R 进行一次扰动
Δ
R
\Delta \boldsymbol{R}
ΔR 。这个扰动可以乘在左边也可以乘在右 边, 最后结果会有一点儿微小的差异, 我们以左扰动为例。设左扰动
Δ
R
\Delta \boldsymbol{R}
ΔR 对应的李代数为
φ
\varphi
φ 。然后, 对
φ
\varphi
φ 求导, 即:
∂
(
R
p
)
∂
φ
=
lim
φ
→
0
exp
(
φ
∧
)
exp
(
ϕ
∧
)
p
−
exp
(
ϕ
∧
)
p
φ
.
\frac{\partial(\boldsymbol{R p})}{\partial \varphi}=\lim _{\varphi \rightarrow 0} \frac{\exp \left(\varphi^{\wedge}\right) \exp \left(\phi^{\wedge}\right) p-\exp \left(\phi^{\wedge}\right) p}{\varphi} .
∂φ∂(Rp)=φ→0limφexp(φ∧)exp(ϕ∧)p−exp(ϕ∧)p.
该式的求导比上面更为简单:
∂
(
R
p
)
∂
φ
=
lim
φ
→
0
exp
(
φ
∧
)
exp
(
ϕ
∧
)
p
−
exp
(
ϕ
∧
)
p
φ
≈
lim
φ
→
0
(
1
+
φ
∧
)
exp
(
ϕ
∧
)
p
−
exp
(
ϕ
∧
)
p
φ
=
lim
φ
→
0
φ
∧
R
p
φ
=
lim
φ
→
0
−
(
R
p
)
∧
φ
φ
=
−
(
R
p
)
∧
.
可见, 扰动模型相比于直接对李代数求导, 省去了一个雅可比
J
l
J_{l}
Jl 的计算。这使得扰动 模型更为实用。请读者务必理解这里的求导运算, 这在位姿估计当中具有重要的意义。
最后, 我们给出
S
E
(
3
)
S E(3)
SE(3) 上的扰动模型, 而直接李代数上的求导就不再介绍了。假设 某空间点
p
p
p 经过一次变换
T
T
T (对应李代数为
ξ
\xi
ξ ), 得到
T
p
T p
Tp。现在, 给
T
T
T 左乘一个扰动
Δ
T
=
exp
(
δ
ξ
∧
)
\Delta \boldsymbol{T}=\exp \left(\delta \boldsymbol{\xi}^{\wedge}\right)
ΔT=exp(δξ∧), 我们设扰动项的李代数为
δ
ξ
=
[
δ
ρ
,
δ
ϕ
]
T
\delta \xi=[\delta \rho, \delta \phi]^{T}
δξ=[δρ,δϕ]T, 那么:
∂
(
T
p
)
∂
δ
ξ
=
lim
δ
ξ
→
0
exp
(
δ
ξ
∧
)
exp
(
ξ
∧
)
p
−
exp
(
ξ
∧
)
p
δ
ξ
\frac{\partial(\boldsymbol{T} \boldsymbol{p})}{\partial \delta \boldsymbol{\xi}}=\lim _{\delta \boldsymbol{\xi} \rightarrow 0} \frac{\exp \left(\delta \boldsymbol{\xi}^{\wedge}\right) \exp \left(\boldsymbol{\xi}^{\wedge}\right) p-\exp \left(\boldsymbol{\xi}^{\wedge}\right) p}{\delta \boldsymbol{\xi}}
∂δξ∂(Tp)=limδξ→0δξexp(δξ∧)exp(ξ∧)p−exp(ξ∧)p
≈
lim
δ
ξ
→
0
(
I
+
δ
ξ
∧
)
exp
(
ξ
∧
)
p
−
exp
(
ξ
∧
)
p
δ
ξ
\approx \lim _{\delta \boldsymbol{\xi} \rightarrow 0} \frac{\left(\boldsymbol{I}+\delta \boldsymbol{\xi}^{\wedge}\right) \exp \left(\boldsymbol{\xi}^{\wedge}\right) p-\exp \left(\boldsymbol{\xi}^{\wedge}\right) \boldsymbol{p}}{\delta \boldsymbol{\xi}}
≈limδξ→0δξ(I+δξ∧)exp(ξ∧)p−exp(ξ∧)p
=
lim
δ
ξ
→
0
δ
ξ
∧
exp
(
ξ
∧
)
p
δ
ξ
=\lim _{\delta \boldsymbol{\xi} \rightarrow 0} \frac{\delta \xi^{\wedge} \exp \left(\xi^{\wedge}\right) \boldsymbol{p}}{\delta \boldsymbol{\xi}}
=limδξ→0δξδξ∧exp(ξ∧)p
=
lim
δ
ξ
→
0
[
δ
ϕ
∧
δ
ρ
0
T
0
]
[
R
p
+
t
1
]
δ
ξ
=\lim _{\delta \xi \rightarrow 0} \frac{\left[
=
lim
δ
ξ
→
0
[
δ
ϕ
∧
(
R
p
+
t
)
+
δ
ρ
0
]
δ
ξ
=
[
I
−
(
R
p
+
t
)
∧
0
T
0
T
]
≜
(
T
p
)
⊙
.
=\lim _{\delta \xi \rightarrow 0} \frac{\left[
我们把最后的结果定义成一个算符
⊙
\odot
⊙ 2), 它把一个齐次坐标的空间点变换成一个
4
×
6
4 \times 6
4×6 的矩阵。

