- 1(三)树莓派使用putty登录_putty远程连接ssh
- 2只需三步,本地打造自己的AI个人专属知识库_本地ai知识库搭建
- 3机器学习与数据挖掘-实验六_在本练习中,你将实现朴素贝叶斯分类器,并对数据进行判别。试着实现拉普拉斯修正的
- 4MySQL基础之触发器,函数,存储过程_mysql触发器调用存储过程
- 5浅谈单元测试 Junit4_junit4实现阶乘功能,并设计测试类,使用参数化设置测试该方法
- 6Eclipse使用Git图解教程_eclipse的git功能介绍
- 7Centos7安装Python3.10速通攻略_centos7 python3.10
- 8【动态规划】投资问题_投资问题动态规划算法
- 9把 charles,Fiddler 证书安装到安卓根目录,解决安卓微信 7.0 版本以后安装证书也无法抓包问题,需要 root_charles证书安装到根目录
- 10本机添加多个git仓库账号_git仓储 添加账号
【STM32+HAL+Proteus】系列学习教程---PWM(呼吸灯)_proteus呼吸灯
赞
踩
实现目标
1、利用定时器输出PWM实现呼吸灯
2、学会STM32CubeMX软件输出PWM的配置
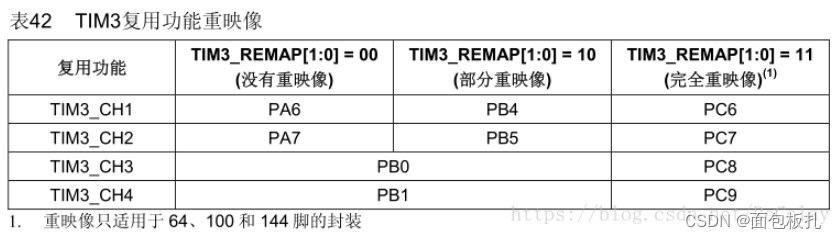
3、具体目标:利用定时器3的通道2(部分重映射到PB5管脚)输出1KHz的矩形波,实现呼吸灯。
一、PWM涉及的几个概念
1、什么是PWM?
PWM(Pulse width modulation)脉冲宽度调制。PWM是通过编程控制输出方波的频率和占空比(高低电平的比例)。广泛应用在从测量、通信、功率控制与变换的许多领域中
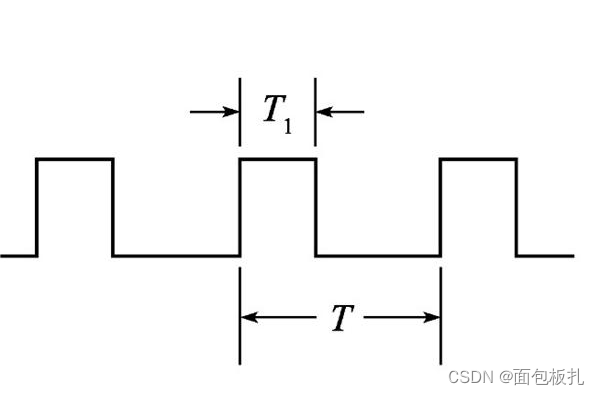
2、PWM的占空比?
占空比(Duty Cycle),是指在一个周期内,高电平时间占整个信号周期的百分比,即高电平时间与周期的比值:
占空比=T1/T
二、定时器产生PWM
1、定时器输出PWM主要特点
(1)STM32的每个通用定时器都有独立的4个通道可以用来作为:输入捕获、输出比较、PWM输出、单脉冲模式输出等。
(2)STM32的定时器除了TIM6和TIM7(基本定时器)之外,其他的定时器都可以产生PWM输出。其中,高级定时器TIM1、TIM8可以同时产生7路PWM输出。
(3)STM32中每个定时器有4个输入通道:TIMx_CH1~TIMx_CH4;
(4)每个通道对应1个捕获/比较寄存器TIMx_CRRx,将寄存器值和计数器值相比较,通过比较结果输出高低电平,从而得到PWM信号;
(5)脉冲宽度调制模式可以产生一个由TIMx_ARR寄存器确定频率、由TIMx_CCRx寄存器确定占空比的信号。
2、PWM的工作模式:
PWM模式分为两种,PWM1和PWM2,都可以设置计数器递增计数或者递减计数。具体如下表

(1)PWM模式1(向上计数) :计数器从0计数加到自动重装载值(TIMx_ARR),然后重新从0开始计数,并且产生一个计数器溢出事件。在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平(高电平),否则为无效电平(低电平);在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
(2)PWM模式2(向上计数) :计数器从自动重装载值(TIMx_ARR)减到0,然后重新从重装载值(TIMx_ARR)开始递减,并且产生一个计数器溢出事件。在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平(低电平),否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平(高电平),否则为无效电平。
以下为PWM模式1向上计数模式输出PWM原理:
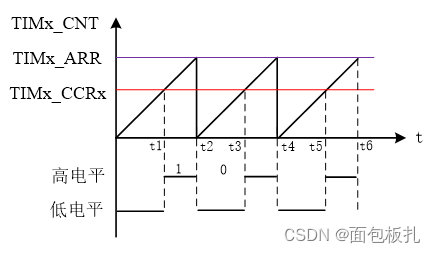
总结:
TIMx_ARR寄存器确定PWM频率,
TIMx_CCRx寄存器确定占空比
三、定时器3输出通道2管脚重映射
1、重映射简介
每个内置外设都有若干个输入输出引脚,一般这些引脚的输出端口都是固定不变的,为了让设计工程师可以更好地安排引脚的走向和功能,在STM32中引入了外设引脚重映射的概念,即一个外设的引脚除了具有默认的端口外,还可以通过设置重映射寄存器的方式,把这个外设的引脚映射到其它的端口。
换种说法:重映射就是引脚重映射,本来每个内置外设都有原来设定的引脚,所谓的重映射就是通过某种方式,将外设本来的引脚的功能赋予给另外的引脚(比如一个本项目中定时器3输出PWM的通道2的引脚是PA7,但这个引脚没有接LED,然而可以通过重映射,将PA7设定成PB5,也就是说PA7取代了PB5的功能,成为了时器3输出PWM的通道2的引脚),但是重映射也是有规定可以映射到哪个引脚的(需要查看手册)而不是你想映射到哪个引脚就映射到哪个引脚。
2、两种重映射
部分重映射 & 完全重映射
- 部分重映射:功能外设的部分引脚重新映射,还有一部分引脚是原来的默认引脚。
- 完全重映射:功能外设的所有引脚都重新映射
3、TIM3重映射表
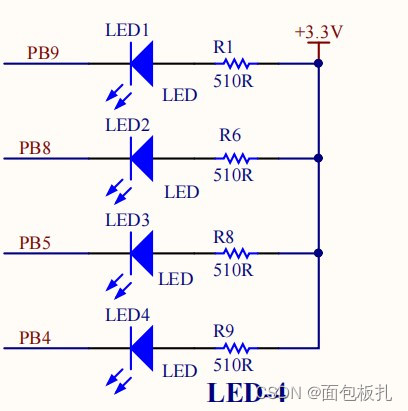
二、原理图设计
三、STM32CubeMX 配置
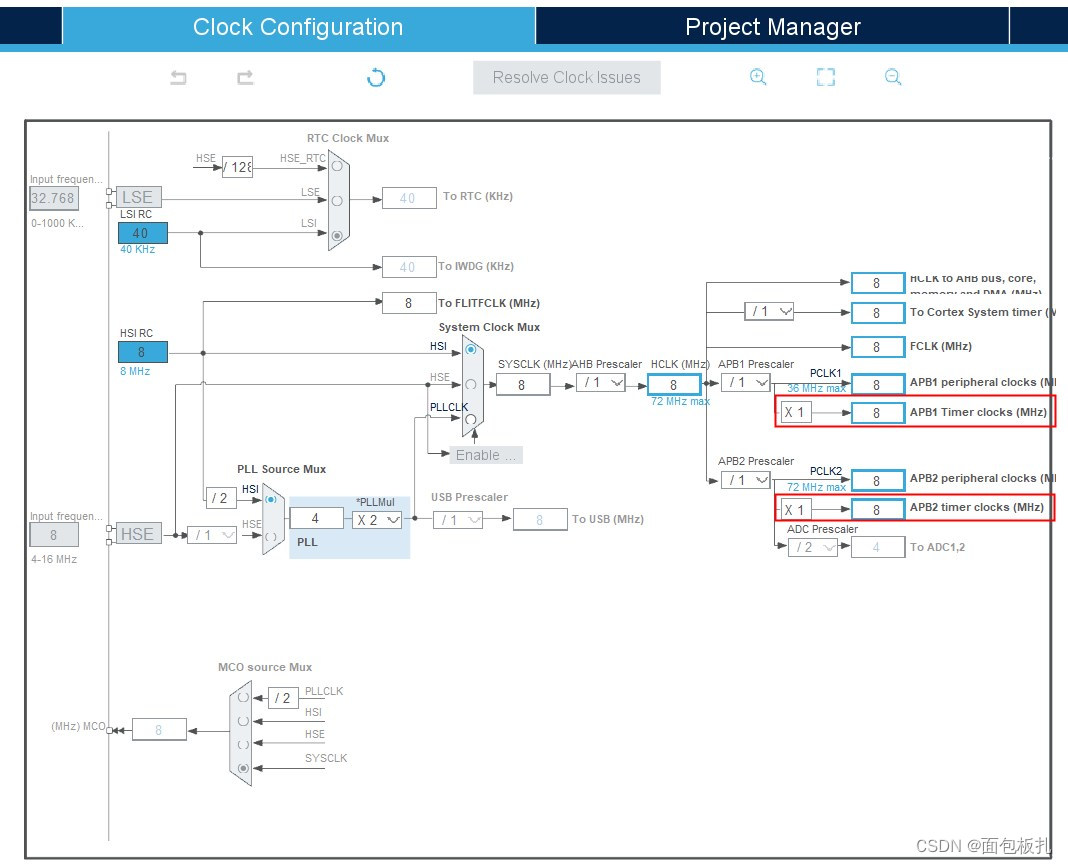
1.定时器3时钟源
2.产生PWM配置
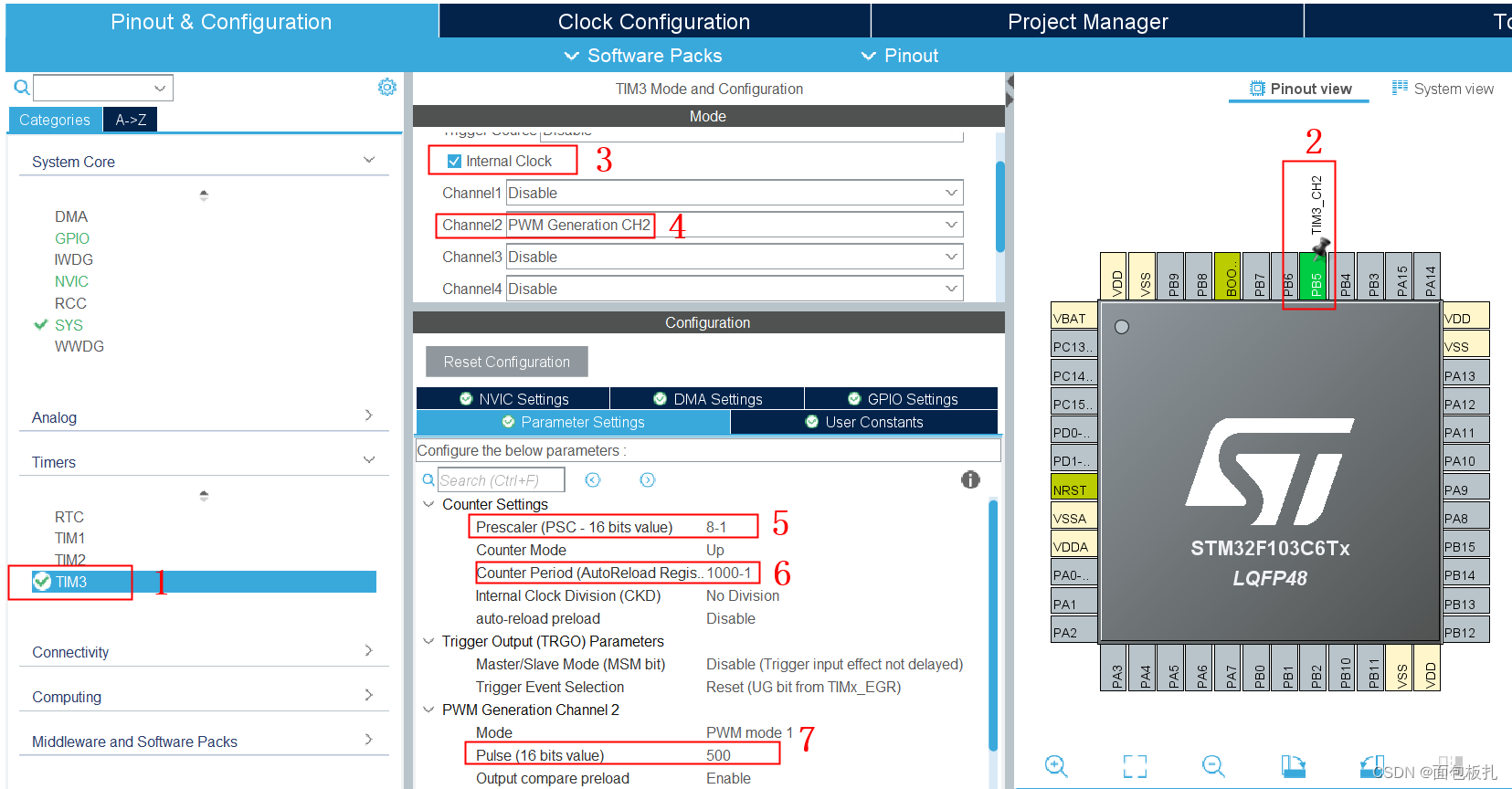
在预分频系数确定的条件下,PWM模式的信号频率是由自动重装载寄存器ARR来确定的,占空比则由比较寄存器CCR来确定。
(1)输出PWM频率f计算:

例如:假设系统时钟为8MHz,通用定时器3时钟Tclk为8MHz,设置如下: 预分频系数PSC=8-1; ARR=1000-1; 则,定时时间Tout=8×1000/8000000=1ms,其频率f = 1/Tout=1000Hz.
(2)Channelx:输出PWM通道
- PWM Generation CH1:CH1输出正常的PWM波形
- PWM Generation CH1N:产生互补的PWM波形
- PWM Generation CH1 CH1N:产生正常和互补的波形(通过两个引脚)
- PWM Generation No Output:不输出PWM波到引脚
- Forced Output CH1:强制CH1输出某个电平
四、程序设计
1.定义一个全局变量
int pwmVal = 500;2.开启定时器3通道2产生PWM
- /* USER CODE BEGIN 2 */
-
- HAL_TIM_PWM_Start(&htim3,TIM_CHANNEL_2);
-
- /* USER CODE END 2 */
3.调整占空比
- while (pwmVal< 1000)
- {
- pwmVal++;
- __HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, pwmVal); //修改比较值,修改占空比
- // TIM3->CCR2 = pwmVal; 与上方相同
- HAL_Delay(2);
- }
- while (pwmVal)
- {
- pwmVal--;
- __HAL_TIM_SetCompare(&htim3, TIM_CHANNEL_2, pwmVal); //修改比较值,修改占空比
- // TIM3->CCR2 = pwmVal; 与上方相同
- HAL_Delay(2);
- }
- HAL_Delay(1000);
五、实验现象

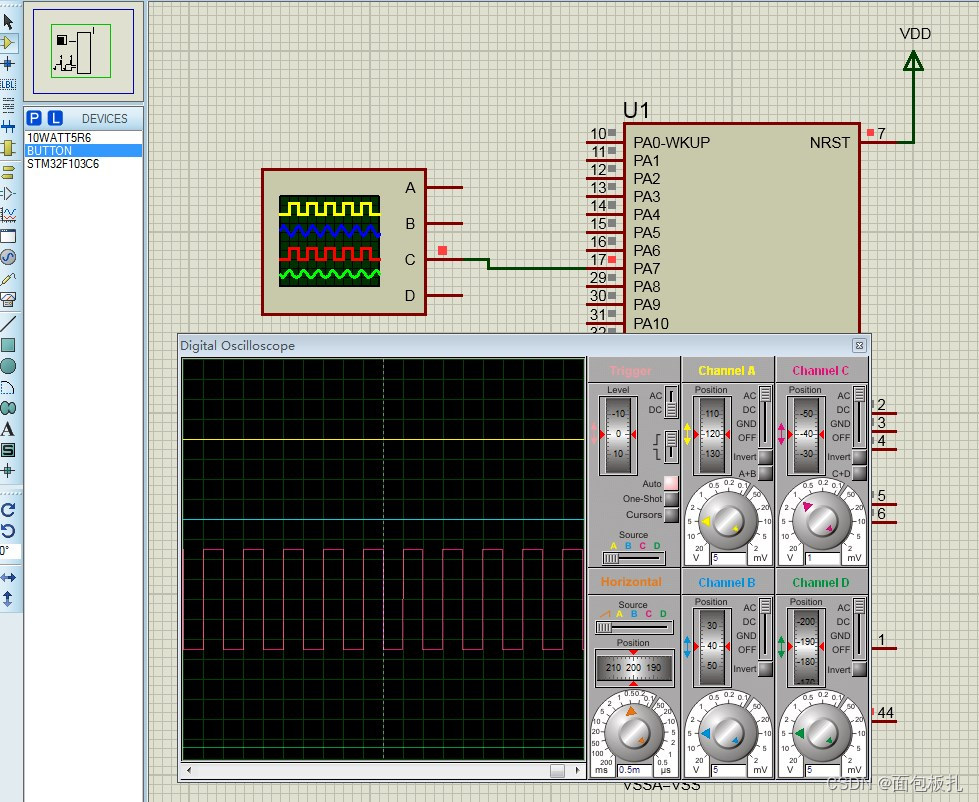
六、仿真实现
Protues 8.8 仿真的时候TIM3输出PWM的通道2 不能够管脚重映射,PWM输出在PA7 !!!