
- 1electron+vue3全家桶+vite项目搭建【二】vite自动引入插件,按需引入element-plus_electron vite vue3 elements-plus
- 2不一样的Gradle多渠道配置总结_build.gradle 多渠道
- 3元宇宙中的云计算,提升你的数字体验_元宇宙云计算应用
- 4Nature Communications|华中科技大学丁汉院士-吴志刚教授团队成果:昆虫尺度水面推进器_丁汉 nature communication
- 5Kafka的基本使用_kafka集群上关闭生产和消费的命令
- 6猿创征文|Hadoop大数据技术_大数据技术文章英文
- 7【记录】Python3|Selenium4 极速上手入门(Windows)_selenium 4.11.2
- 8boot1 io口 stm32,stm32 Boot0,Boot1引脚设置
- 9python如何爬取sci论文中所需的数据_sci论文中的科研数据处理方法
- 10Opencv-python教程(5)——图像算术和逻辑OpenCV_python 图像逻辑运算
机器人开源项目分享,助力一户一机器人_lerobot开源
赞
踩
最初,因隋炀帝思念心切,命工匠按照柳抃的形象制作了木偶机器人,被认为是历史上最早的机器人之一。这些木偶机器人通过精巧设计的机关,能够执行坐、起、拜、伏等动作。
如今,随着科技的发展,机器人已经广泛应用于医疗、军事、教育、服务等各个领域,为人类提供更安全、更便捷、更高效的服务。
因此,本文整理了一些机器人相关的开源数据集、模型和项目,旨在帮助研究人员更好地开展相关领域的工作。
LeRobot
LeRobot 是由 Hugging Face 开源的一个机器人代码库,提供模型、数据集和工具。它通过预训练模型、数据集和模拟来拉低机器人入门门槛。
核心特点:
-
开源:与各方合作创建一个庞大的众包机器人数据集,增强了开发复杂人工智能驱动机器人的资源。
-
多功能:一个用于共享、可视化数据和训练最先进模型(SOTA)的库。用户可以访问大量预训练模型,快速启动项目。
-
兼容性高:兼容各种机器人硬件,从简单的机械臂到复杂的类人机器人。
推人表示 Hugging Face 这一举动将削弱大型人工智能技术公司的垄断地位,加速人工智能机器人技术的创新!!!
-
Github:https://github.com/huggingface/lerobot
-
Huggingface:https://huggingface.co/lerobot
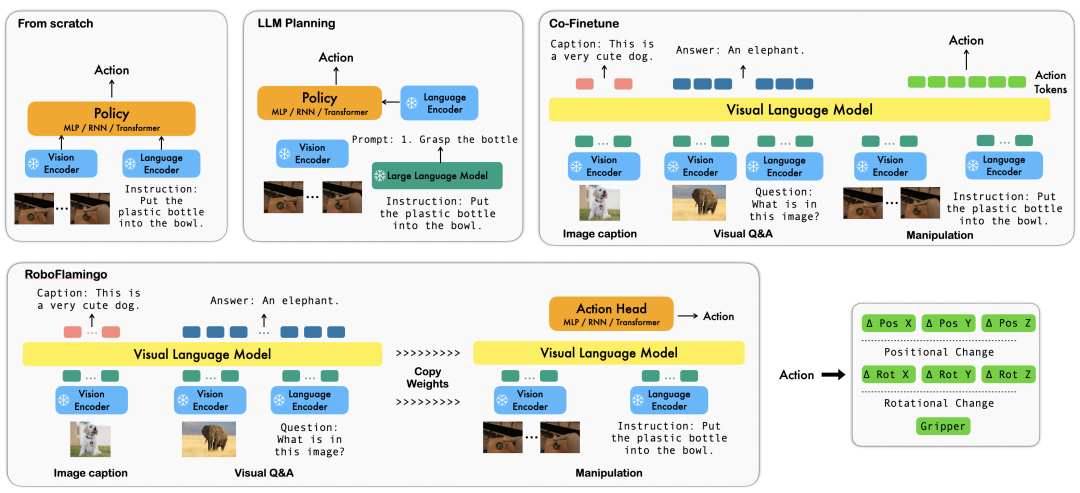
RoboFlamingo
RoboFlamingo 是机器人领域首个开源的视觉-语言操作大模型,由 ByteDance 团队开发。通过简单的微调,即可使 RoboFlamingo 适应基于语言的机器人操作任务。此外,它能够通过开环控制实现实时响应,并且可以灵活部署在性能较低的平台上。
-
论文链接:https://arxiv.org/abs/2311.01378
-
项目链接:https://roboflamingo.github.io/
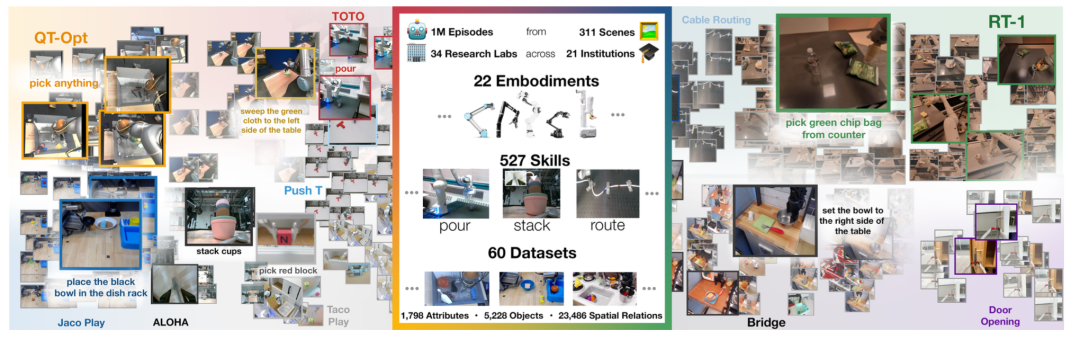
Open X-Embodiment
Open X-Embodiment 数据集是迄今为止最大的开源真实机器人数据集,由全球 34 个机器人研究实验室提供的 60 个现有机器人数据集构建而成。该数据集包含超过 1 百万条真实机器人轨迹,涵盖了 22 种不同的机器人具身,从单臂机器人到双手臂机器人和四足机器人。
-
论文链接:https://arxiv.org/abs/2310.08864
-
项目链接:https://robotics-transformer-x.github.io/
RoboAgent
由 CMU 和 Meta AI 共同开发的通用的 RoboAgent,仅在 7500 条轨迹数据上进行训练,就能在 38 个任务中展示 12 种多样的操作技能,且不限于拾取 / 推动,还包括关节对象操纵和物体重新定位,以及能将这些技能推广应用于数百个不同的未知情境(未知物体、未知任务,甚至完全未知的厨房环境)。
其中用于训练 RoboAgent 的数据集 RoboSet(MT-ACT)仅包括 7500 条轨迹(比 RT-1 的数据少 18 倍)。除此之外,还发布了一个更大的数据集 RoboSet,该数据集是在几个相关项目过程中收集的,总共包含 100050 条轨迹,其中包括非厨房场景。并且已开源。
-
论文链接:https://arxiv.org/pdf/2309.01918.pdf
-
项目链接:https://robopen.github.io/

Mobile ALOHA
Mobile ALOHA 是由斯坦福大学的研究团队开发的一个机器人开源项目。它的运动控制能力采用模仿学习,通过人类操作机器人,机器人学习模仿人类行为,形成机器人的行为逻辑。仅需要进行 50 次演示的训练,就能够在处理日常家务时达到 80% 以上的成功率。
例如,在论文中列出的任务执行成功率如下:擦拭红酒、呼叫电梯、击掌、收纳平底锅、冲洗平底锅、推椅子成功率分别为 95%、95%、85%、85%、80%、80%。
其中,最令人惊讶的是制作滑蛋虾仁这项长达 75 秒的艰巨烹饪任务,尽管成功率只有40%。
-
论文链接:http://arxiv.org/abs/2401.02117
-
项目链接:https://mobile-aloha.github.io/
Dobb·E
Dobb·E 是由纽约大学的研究团队开发的一个开源家庭机器人系统,仅需约 20 分钟就可以教会机器人完成一项家务,成功率达到 81%。
Homes of New York(HoNY)数据集包含纽约 22 户家庭使用 Stick 工具收集的 13 小时互动的视频,包含每秒 30 帧的 RGB 和深度视频,以及 6D 握爪姿势和握爪张开角度的完整动作标注。
-
论文链接:https://arxiv.org/abs/2311.16098
-
项目链接:https://dobb-e.com/
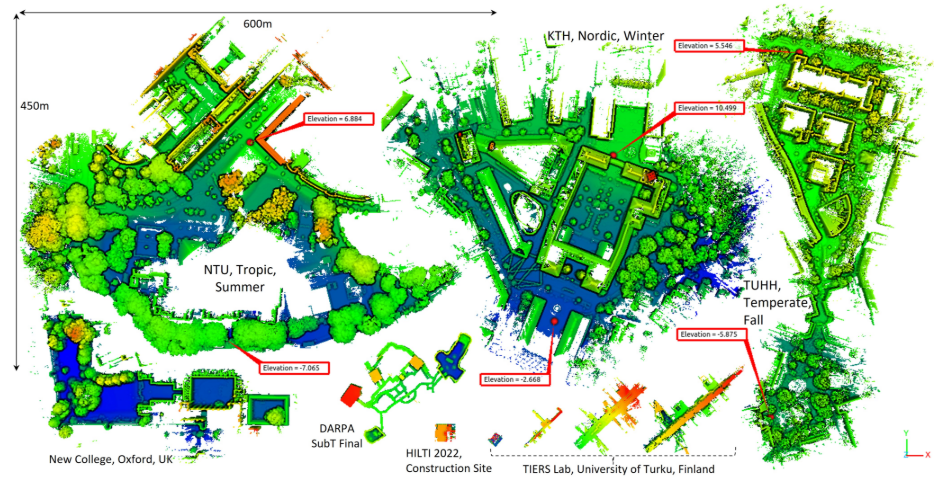
MCD
MCD 是由南洋理工开源的大规模多校区机器人感知数据集。该数据集在亚洲和欧洲的大型校园区域不同季节收集而成,具有以下特点:
-
多种感测模态
-
3D spinning lidar
-
Non-repetItive lidar
-
Stereo cameras
-
High quality IMUs
-
UWB ranging sensors
-
-
覆盖领域广:横跨欧亚的三个大学校区
-
逐点标注的NRE点云
-
高精度连续时间真实值
-
迎接感知中的挑战
-
广泛的基准测试
收录于 CVPR 2024。
-
论文链接:https://arxiv.org/abs/2403.11496v1
-
项目链接:https://mcdviral.github.io/
TreeScope
TreeScope 是一个用于精准农业和林业的机器人数据集,用于对林业和果园中的树木进行计数和绘图。
特点如下:
-
超 1800 多个人工标注的树干语义标签和实地测量的树木直径
-
10 小时的 ROS bags,2.2 TB 的数据,覆盖 50 公顷的地形
-
使用无人机和移动机器人平台收集数据
-
弗吉尼亚州和新泽西州森林中的各种松树和橡树林
-
加利福尼亚中部开心果和杏仁果园的树冠开启和关闭情况
-
无人机自主飞行和传感器数据可供飞行一小时使用
收录于 ICRA 2024。
-
论文链接:https://arxiv.org/abs/2310.02162
-
项目链接:https://treescope.org/
USTC FLICAR Dataset
USTC FLICAR Dataset 是由中国科大发布的首个高空作业机器人多模态感知数据集,超过 1.5TB 个数据,包括 4 万个立体图像对、10万个单目图像、7万帧激光雷达点云以及高频IMU/INS和激光跟踪仪运动测量数据。
-
中文介绍:https://lmbd.ustc.edu.cn/2023/1012/c10217a614638/page.htm
-
论文链接:https://journals.sagepub.com/doi/abs/10.1177/02783649231195650
-
项目链接:https://ustc-flicar.github.io/

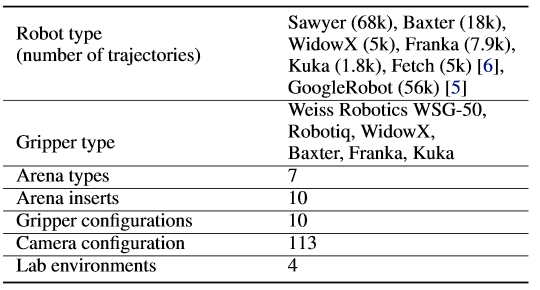
RoboNet
RoboNet 是由伯克利人工智能研究公司开源的大规模多机器人学习数据集,包含超过 1500 万个机器人与物体交互的视频帧,这些视频帧来自 113 个独特的摄像机视角。
RoboNet 示例及数据统计如下:
-
论文链接:https://arxiv.org/abs/1910.11215
-
项目链接:https://www.robonet.wiki/
随着机器人技术的不断进步,其应用范围越来越广泛,对操作精度等性能的要求也在持续提升。面对这一挑战,开发者们积极采取各种措施进行应对,从构建大规模数据集到引入先进的机器学习技术,不断涌现各种方法以适应精准机器人技术的不断演变。然而,技术的升级离不开算力的支持。作为算力服务商,趋动云拥有高性能的计算资源,能够快速处理海量数据,为开发人员提供强大的支持。
❝趋动云是面向企业、科研机构和个人 AI 开发者构建的开发和推理训练服务,也是全球首个基于 GPU 算力池化云的服务。
趋动云的使命是连接算力·连接人:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/喵喵爱编程/article/detail/900447
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

