
- 1【Verilog 教程】7.4Verilog CIC 滤波器设计_cic滤波器verilog设计
- 22023华为od机试C卷【路口最短时间问题】Python 实现_定街道是棋盘型的,每格距离相等,车辆通过每格街道需要时间均为 timeperroad;街道
- 3gitee 简易使用 上传文件_gitee手动上传文件
- 4演唱会为什么总是抢不到票?用Python做一个自动抢票脚本!想看谁的就看谁的!_脚本抢票_演唱会脚本抢票
- 5windows11通过scp向Linux发送中文命名文件(三步解决乱码问题)_windows11 使用scp
- 6H5 混合开发(更新中)_h5 和ios 安卓混合开发
- 7使用Zxing生成和解析QRCODE
- 8HarmonyOS(36) DevEco Studio 配置debug和release
- 9大数据之Spark(五):DAGScheduler 的任务划分_spark dag任务分配原则
- 10stc89c52单片机介绍_DIY迷你单片机学习板
55-基于51单片机步进电机正反转加减速控制程序代码原理图PCB元件清单_c51控制电机正反转
赞
踩
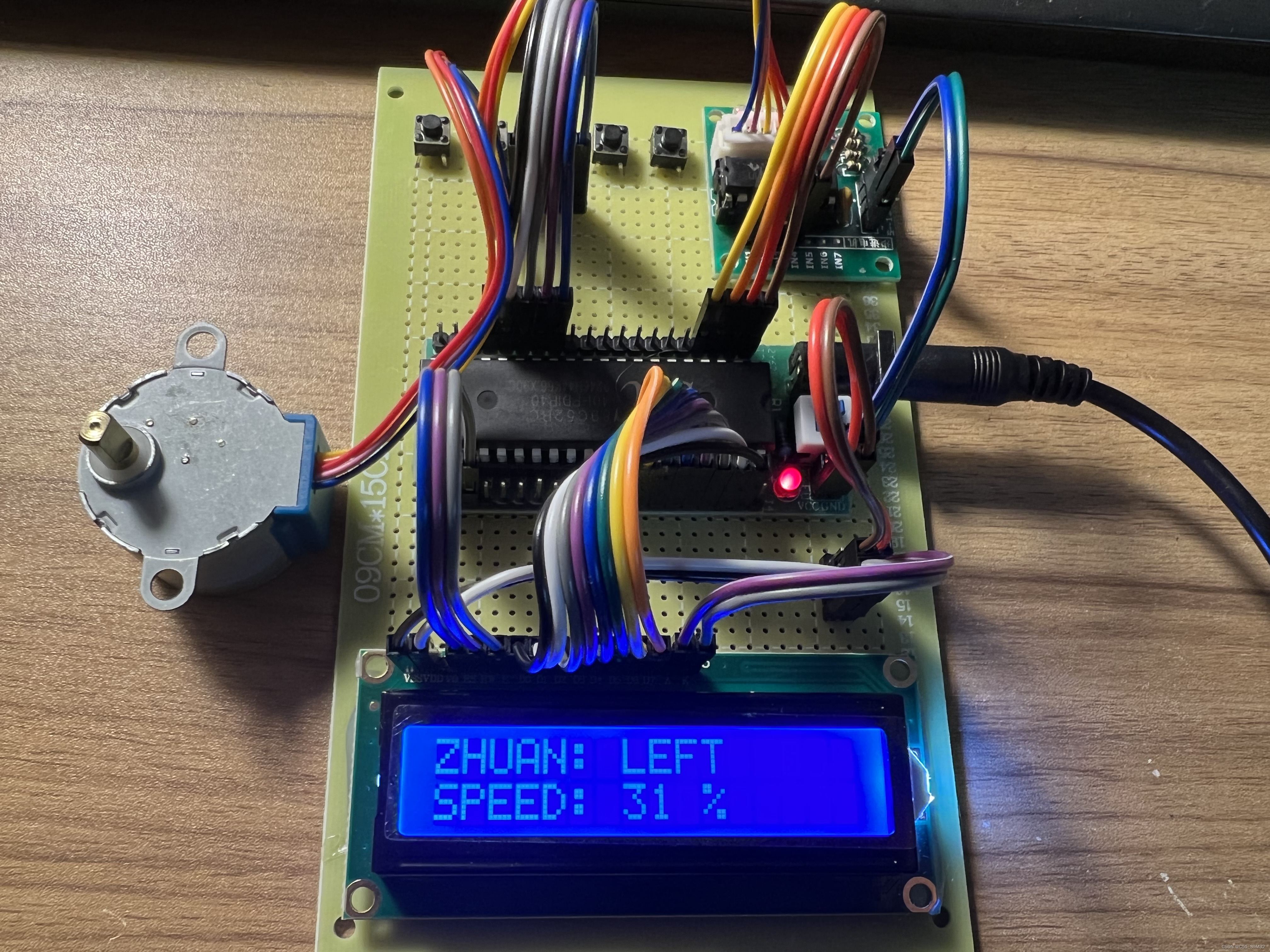
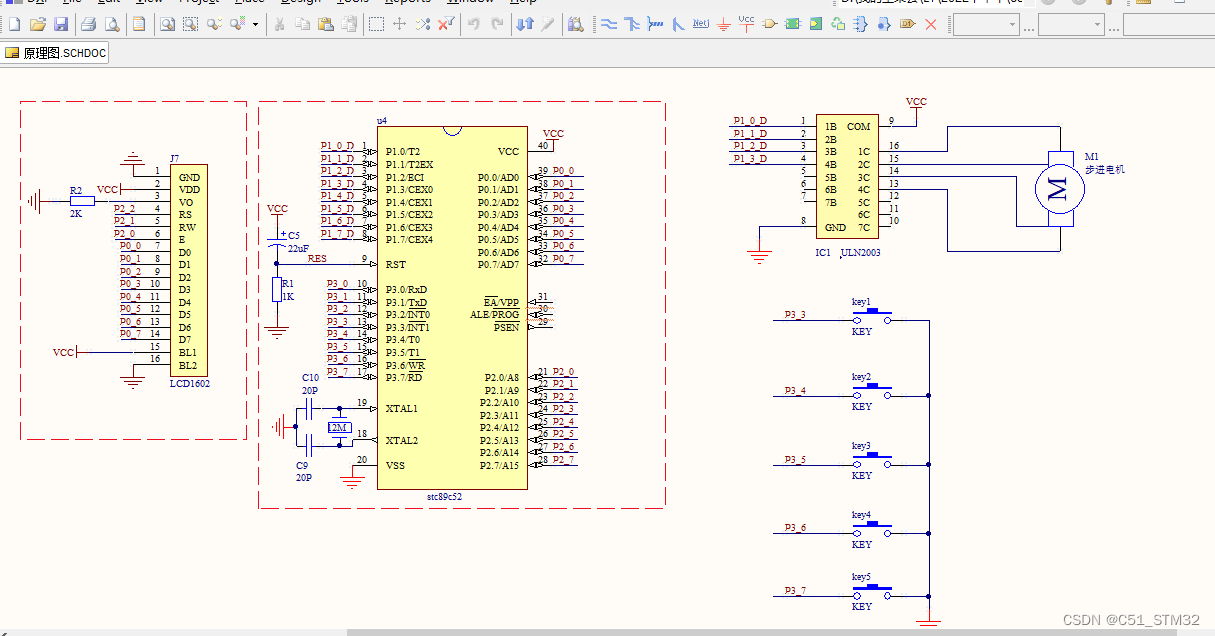
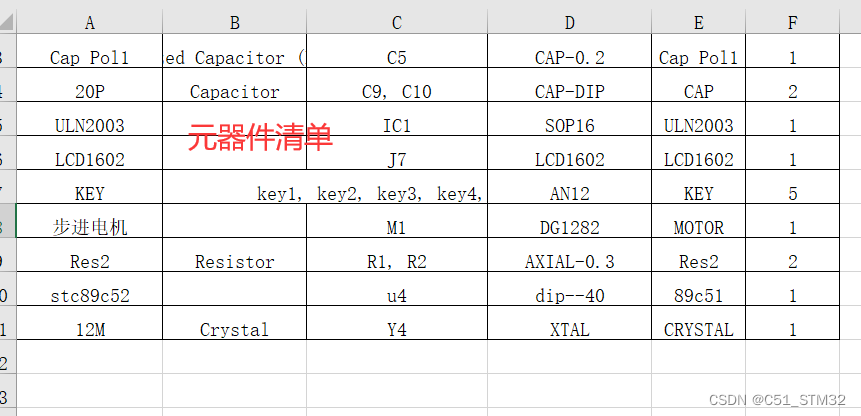
功能介绍:通过51单片机作为主控CPU,通过ULN2003步进电机驱动模块来进行步进电机驱动,通过按键设置步进电机正反转和停止,可以通过按键调节步进电机速度,并且将步进电机的状态和速度显示到LCD1602显示屏上面,程序有中文注释,新手容易看懂,采用keil5和C语言编写,程序已经经过实物验证,资料分享下载链接:设计资料合集
ULN2003是高耐压、大电流复合晶体管阵列,由七个硅NPN 复合晶体管组成,每一对达林顿都串联一个2.7K 的基极电阻,在5V 的工作电压下它能与TTL 和CMOS 电路直接相连,可以直接处理原先需要标准逻辑缓冲器来处理的数据。
55-基于51单片机步进电机正反转加减速控制(程序+原理图+元件清单全套资料)
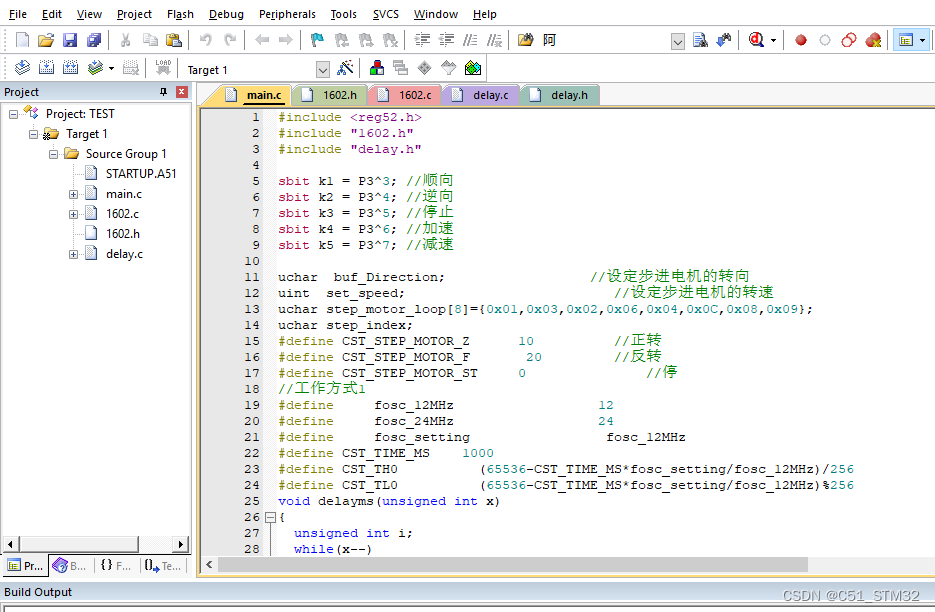
- uchar buf_Direction; //设定步进电机的转向
- uint set_speed; //设定步进电机的转速
- uchar step_motor_loop[8]={0x01,0x03,0x02,0x06,0x04,0x0C,0x08,0x09};
- uchar step_index;
- #define CST_STEP_MOTOR_Z 10 //正转
- #define CST_STEP_MOTOR_F 20 //反转
- #define CST_STEP_MOTOR_ST 0 //停
- //工作方式1
- #define fosc_12MHz 12
- #define fosc_24MHz 24
- #define fosc_setting fosc_12MHz
- #define CST_TIME_MS 1000
- #define CST_TH0 (65536-CST_TIME_MS*fosc_setting/fosc_12MHz)/256
- #define CST_TL0 (65536-CST_TIME_MS*fosc_setting/fosc_12MHz)%256
- void delayms(unsigned int x)
- {
- unsigned int i;
- while(x--)
- for(i=125;i>0;i--);
- }
- void step_motor_driver(void)//电机执行函数
- {
- static uint speed_delay=0;
-
- speed_delay++;
- if( buf_Direction==CST_STEP_MOTOR_Z)
- {
- P1=step_motor_loop[step_index];
- if(speed_delay >=set_speed )
- {
- speed_delay =0;
- step_index--;
- if(step_index <=0)
- step_index =7;
- }
-
-
- }
- else if( buf_Direction==CST_STEP_MOTOR_F)
- {
- P1=step_motor_loop[step_index];
-
- if(speed_delay >=set_speed)
- {
- speed_delay =0;
- step_index++; //大于7,从头再来
- if(step_index >7)
- step_index =0;
- }
- }
- else
- {
- speed_delay =0;
- P1=0x00;
- }
-
- }
- void init_timer0(void)
- {
- TCON=0x00;
- TMOD=0x00;
- TL0=0x00;
- TH0=0x00;
- TCON=0x00;
- // Timer 0 C/T=0,定时工作方式
- //Timer 0 M1,M0=0,1 .work mode 1 www.gdzs.si.gov.cn
- TMOD=0x01; //GATE=0,以运行控制位TR0 启动定时器0 C/T=0,定时工作方式
- TH0=CST_TH0;
- TL0=CST_TL0;
- TF0=0;//clear 0. count over flag.
- TR0=1;// enable TIMER0 ,start count
- ET0=1; //enable accept interrupt
-
- }
- /********************************************************************
- * 名称 : Main()
- * 功能 : 主函数
- ***********************************************************************/
- void main()
- {
-
- init_timer0();
- lcd1602_init();
- L1602_string(1,1,"ZHUAN:");L1602_string(1,7," STOP ");
- L1602_string(2,1,"SPEED:"); L1602_string(2,10," % ");
- buf_Direction=CST_STEP_MOTOR_ST;
- set_speed=15;
- step_index=3;
- EA=1;
- while(1)
- {
- if(k1==0)//向左转
- {
- while(k1!=1);
- buf_Direction=CST_STEP_MOTOR_Z;
- L1602_string(1,7," LEFT ");
- }
- if(k2==0)//向右转
- {
- while(k2!=1);
- buf_Direction=CST_STEP_MOTOR_F;
- L1602_string(1,7,"RIGHT ");
- }
- if(k3==0)//停止
- {
- while(k3!=1);
- buf_Direction=CST_STEP_MOTOR_ST;
- L1602_string(1,7," STOP ");
- }
- if(k4==0)//减速
- {
- while(k4!=1);

51单片机最小系统介绍
单片机(Microcontrollers)是一种集成电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU、随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计数器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的微型计算机系统,在工业控制领域广泛应用。从上世纪80年代,由当时的4位、8位单片机,发展到现在的300M的高速单片机。本文的单片机特指51单片机,具体芯片型号是 AT89C52。需注意STC89C51,STC89C52,AT89C51,AT89C52都是51单片机的一种具体芯片型号。
最小系统组成:
51单片机最小系统:单片机、复位电路、晶振(时钟)电路、电源
最小系统用到的引脚
1、主电源引脚(2根)
VCC:电源输入,接+5V电源
GND:接地线
2、外接晶振引脚(2根)
XTAL1:片内振荡电路的输入端
XTAL2:片内振荡电路的输出端
3、控制引脚(4根)
RST/VPP:复位引脚,引脚上
复位电路
一般来说,在电路图中,电容的的大小是10uf,电阻的大小是10k。(不特指本电路,具体参数看仿真图)
在5V正常工作的51单片机中小于1.5V的电压信号为低电平信号,而大于1.5V的电压信号为高电平信号。可以算出电容充电到电源电压的0.7倍,即电容两端电压为3.5V、电阻两端电压为1.5V时,需要的时间约为T=RC=10K*10UF=0.1S。
也就是说在单片机上电启动的0.1S内,电容两端的电压从0-3.5V不断增加,这个时候10K电阻两端的电压为从5-1.5V不断减少(串联电路各处电压之和为总电压),所以RST引脚所接收到的电压是5V-1.5V的过程,也就是高电平到低电平的过程。
单片机RST引脚是高电平有效,即复位;低电平无效,即单片机正常工作。所以在开机0.1S内,单片机系统RST引脚接收到了时间为0.1S左右的高电平信号,所以实现了自动复位。
在单片机启动0.1S后,电容C两端的电压持续充电为5V,这是时候10K电阻两端的电压接近于0V,RST处于低电平所以系统正常工作。当按键按下的时候,开关导通,这个时候电容两端形成了一个回路,电容被短路,所以在按键按下的这个过程中,电容开始释放之前充的电量。随着时间的推移,电容的电压在0.1S内,从5V释放到变为了1.5V,甚至更小。根据串联电路电压为各处之和,这个时候10K电阻两端的电压为3.5V,甚至更大,所以RST引脚又接收到高电平。单片机系统自动复位。

