
- 1前端发送Fetch请求实现流式请求、模拟打字机效果等_前端流式数据打字机效果
- 2paddlepaddle测试安装_「深度学习系列」PaddlePaddle之手写数字识别
- 3ICRA 2021自动驾驶相关论文汇总 | 科研党看过来,全文干货
- 4CodeWhisperer 史上最强大的 AI 编程助手!!_c# ai助手
- 5短时交通速度预测SCG:A Novel STFSA-CNN-GRU Hybrid Model for Short-Term Traffic Speed Prediction_交通流 速度预测
- 6记:vite3+vue3+axios前端项目跨域问题解决【前端和服务器nginx配置】_vite跨域配置
- 7RNN知识点复习_双向rnn和rnn比有哪些优势
- 8怎样用Excel搜索表格内的内容?_excel表格怎么查找内容
- 9一个简单的 NLP(自然语言处理)任务和json的简单使用_自然语言转json
- 10LINUX 查看和修改文件系统的block的大小_linux 写入block 大小
网络套接字-TCP服务器
赞
踩
一 前言
前面已经写过udp服务器的实现了,那里说了很多编写服务器的所需知识,在tcp服务器实现中就不再赘述了。
二 服务端编写
大致接口如下。
- ./server + port端口号 启动时指明端口号
- void usage(const std::string proc)
- {
- std::cout<<"Usage "<<proc<<" port"<<std::endl;
- }
-
- int main(int argc,char*argv[]) 解析命令行参数,第二个就是端口号
- {
- if(argc != 2)
- {
- usage(argv[1]);
- std::cout<<"port error"<<strerror(errno)<<std::endl;
- exit(USAGE_ERR);
- }
- u_int16_t port = atoi(argv[1]);将字符串的端口号转为数字,后续传给服务端类。
-
- tcp->InitServer();
- tcp->start();
- return 0;
- }

然后我们就去实现类了,首先服务端必定要有端口号,而且一个公司部署的服务端的端口号是分配好的。还有个成员是保存套接字的,这个后面具体实现再提。
- namespace server
- {
-
-
- class TcpServer
- {
- public:
- TcpServer()
- {
- ;
- }
- ~TcpServer()
- {
- ;
- }
- void InitServer()
- {
-
- }
- void start()
- {
-
- }
-
- private:
- int listensocket_;
- int port_;
- };
- };
1 创建套接字
初始化,显然就是要打开网络文件,创建套接字,直接复制udp的实现。
- // 1 创建套接字
- listensocket_ = socket(AF_INET, SOCK_STREAM, 0);
- if (listensocket_ < 0)
- {
- std::cout << "socket err" << std::endl;
- exit(SOCKET_ERR);
- }
- std::cout << "socket success" << std::endl;
2 开始绑定
注意:recv和sendto函数内部不会实现大小端转化,需要我们自己主机转网络序列。
-
- // 2 绑定端口号和ip地址
- struct sockaddr_in sock; // 头文件<netinet/in.h>
- bzero(&sock, sizeof(sock));
- sock.sin_addr.s_addr = INADDR_ANY; // 设置ip地址 表示所有的ip的地址
- sock.sin_port = htons(port_);
- sock.sin_family = AF_INET;
- if (bind(listensocket_, (sockaddr *)(&sock), sizeof(sock)) < 0)
- {
- std::cout << "bind error " << strerror(errno) << std::endl;
- exit(BIND_ERR);
- }
- std::cout << "bind success" << std::endl;
3 监听
参数2后面提及协议再说。可以设个不大不小的整数。
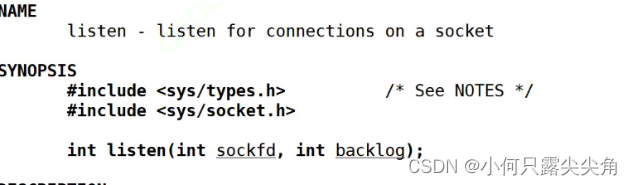
listensocket_是我们先前创建套接字返回的文件描述符,这个描述符被用来监听了,监听的是客户端的链接请求,因为请求也是通信,所以我们要先创建套接字,如果有链接请求从网络中来,os会把链接请求转成数据保存在监听套接字对应的文件中,上层就从这个文件中读取链接。
- // 3 开始监听
- if (listen(listensocket_, backlog)) // 返回0,监听成功
- {
- std::cout << "listen error " << strerror(errno) << std::endl;
- exit(LISTEN_ERR);
- }
4 启动服务器
当有请求来了,我们当然要调用函数去处理,参数很熟悉,sockfd是我们先前用的listensockt_,因为请求都在这个文件内。

- void start()
- {
- while (true)
- {
- // 获取链接
- struct sockaddr_in sock; // 头文件<netinet/in.h>
-
- socklen_t len = sizeof(sock);
- int socket = accept(listensocket_, (sockaddr *)&sock, &len); // 不保存吗
- if (socket < 0)
- {
- // std::cout << "accept err" << std::endl;
- exit(SOCKET_ERR);
- }
- std::cout << "accept success" << std::endl;
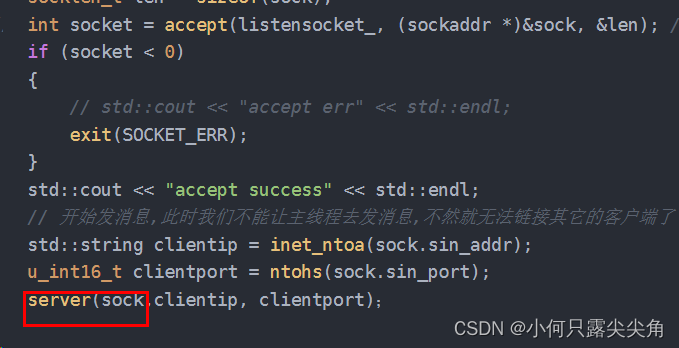
- // 开始发消息,此时我们不能让主线程去发消息,不然就无法链接其它的客户端了
- std::string clientip = inet_ntoa(sock.sin_addr);
- u_int16_t clientport = ntohs(sock.sin_port);
- server(sock,clientip, clientport);
-
- }
- }
- void server(int sock, std::string ip, uint16_t port)
- {
- ;
- }
此时收到请求后,我们也就获得了客户端的ip和端口,接下来就用ip和端口传给server函数实现通信。可是为什么accept又返回一个文件描述符,为什么要有两个套接字呢?在udp服务器中我们只创建了一个文件,意味着所有客户端发来的消息都在这个文件中,读取的时候其实很容易读取到a客户端的数据处理完发给了b客户端,那对于a客户端来说,数据就缺失了,所以udp的通信确实是不考虑完不完整的,所以tcp为了保证客户端数据的独立性,就每接收一次链接就创建一个文件,内部一定会把客户端的ip和端口号和这个文件绑定,这样下次客户端的数据来的时候就会根据ip和端口号判断放在哪个文件中了。
接下来看看server函数内如何通信。直接调用read函数读,调用write函数写,奇怪,为什么先前udp服务器不可以用read,而是用recvfrom,也不是用write,而是用sendto,据我了解,read和write是面向字节流的,udp服务端我们打开文件的时候是指明面向数据报的,read用面向字节流读取面向数据报的文件会出问题。后面讲tcp,udp协议,了解了面向字节流和面向数据报就理解得更深刻了。
- void server(int sock, std::string ip, uint16_t port)
- {
-
- char buffer[1024] = {0};
- int n = read(sock, buffer, sizeof(buffer) - 1);
- if (n > 0)
- {
- buffer[n] = 0;
- // 写回给客户端
- write(sock, ret.c_str(), ret.size());
- }
- else if (n == 0)
- {
- close(sock);
- std::cout << name << " 断开连接" << std::endl;
- }
- else
- {
- close(sock);
- exit(READ_ERR);
- }
-
- }
可是直接输出又有点单调,所以我们做了些修改。调用回调方法对数据做处理。

func_就是func_t定义的变量,可以接收一个可调用对象,这个可调用对象的类型是string(string),也就是返回值是string,参数也是string。

数据处理方法由外部定义。如下就是完整的定义服务端对象和启动。
- std::string echo(std::string message)
- {
- return message;
- }
- int main(int argc,char*argv[])
- {
- if(argc != 2)
- {
- usage(argv[1]);
- std::cout<<"port error"<<strerror(errno)<<std::endl;
- exit(USAGE_ERR);
- }
- u_int16_t port = atoi(argv[1]);
- std::shared_ptr<TcpServer> tcp = std::make_shared<TcpServer>(echo,port);
- tcp->InitServer();
- tcp->start();
- return 0;
- }
相应构造函数也要修改。

三 客户端编写
同样客户端不用自己bind。那要不要listen,accept呢? 我认为是不需要的,这两个函数的意义在于等待别人来链接,一般来说都是客户端主动连接服务端,很少有服务端来主动找客户端的,并且获取链接方便后面给对方发数据,前面还说了可以保证服务端收到来自客户端数据的独立和安全。
而客户端本身不用担心多个服务端发来的数据混杂,虽然我们手机上有多个客户端,但是我们的客户端都是一个个进程,创建的套接字文件是独立的,服务端是因为会有多个客户端和它通信才要创建多个文件,我们这里是一个客户端对应一个服务端。所以通信步骤如下。
1 创建套接字
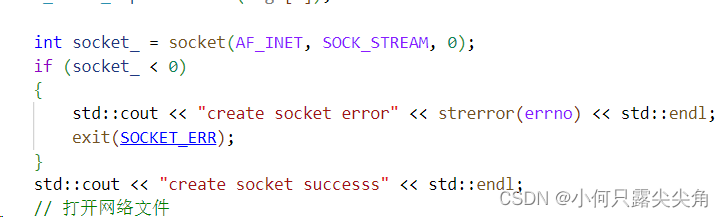
2 发起链接
用的是下面这个connect函数,参数列表也是非常熟悉。

直接开始准备初始化sock结构体。

因为我们不能一链接失败就退出,要尝试重连几次,就像我们打游戏没网,也是会有尝试重连选项的。
- int main(int argc, char *argv[]) ip地址不能是任意的,必须知道服务端的ip地址和端口号
- {
- if (argc != 3)
- {
- usage(argv[0]);
- std::cout << "stage error" << strerror(errno) << std::endl;
- exit(USAGE_ERR);
- }
- const std::string ip_ = argv[1];
- u_int16_t port = atoi(argv[2]);
-
- int socket_ = socket(AF_INET, SOCK_STREAM, 0);
- if (socket_ < 0)
- {
- std::cout << "create socket error" << strerror(errno) << std::endl;
- exit(SOCKET_ERR);
- }
- std::cout << "create socket successs" << std::endl;
- // 打开网络文件
-
- // 不用客户端自己绑定端口号和ip地址
- struct sockaddr_in sock;
- sock.sin_addr.s_addr = inet_addr(ip_.c_str()); // 将字符串类型的地址转为四字节地址,而且是网络字节序了
- sock.sin_port = htons(port);
- sock.sin_family = AF_INET;
- int len = sizeof(sock);
- // 开始连接
- int timenum = 5;
- while (connect(socket_, (sockaddr *)&sock, len) < 0)
- {
- sleep(1);
- std::cout << "开始重连:" << std::endl;
- timenum--;
- if (timenum == 0)
- break;
- }
- if (timenum <= 0)
- {
- std::cout << "链接失败" << std::endl;
- exit(CON_ERR);
- }
- return 0;
- }
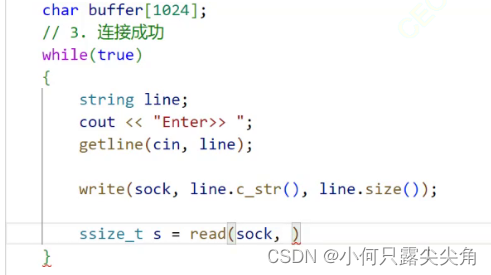
接下来就是我们客户端直接把消息写到文件中,然后read读取服务端返回的数据。
四 实验测试
测试1
服务端bug:如果客户端不给我们发消息,我们就会阻塞在read这里,就不能调用accept接收新连接了,所以我们应该安排一个线程去调用server函数来收发消息。

注意:我服务端代码里的server函数只能读一次和发一次消息给客户端,如果写成死循环后面引进线程池还会出问题,因为线程数量有限,多个客户端来链接,线程就会不够,这里不会,因为此时我们是一个线程负责收发消息给一个客户端。
-
-
- void *recv(void *arg)
- {
- // 收消息
- int socket_ = *((int *)arg);
- while (true)
- {
- char buffer[1024] = {0};
- int n = read(socket_, buffer, sizeof(buffer) - 1);
- if (n > 0)
- {
- buffer[n] = '\0';
- std::cout << "server echo# " << buffer << std::endl;
- }
- else if (n == 0)
- {
- close(socket_);
- std::cout << "server quit" << std::endl;
- }
- else
- {
- close(socket_);
- std::cout << "client read err" << strerror(errno) << std::endl;
- exit(READ_ERR);
- }
- }
- }
-
- void start()
- {
- while (true)
- {
- // 获取链接
- struct sockaddr_in sock; // 头文件<netinet/in.h>
- bzero(&sock, sizeof(sock));
- socklen_t len = sizeof(sock);
- int socket = accept(listensocket_, (sockaddr *)&sock, &len); // 不保存吗
- if (socket < 0)
- {
- lg_(ErrorLevel::Info,"accept err");
- // std::cout << "accept err" << std::endl;
- exit(SOCKET_ERR);
- }
- std::cout << "accept success" << std::endl;
- // 开始发消息,此时我们不能让主线程去发消息,不然就无法链接其它的客户端了
- std::string clientip = inet_ntoa(sock.sin_addr);
- u_int16_t clientport = ntohs(sock.sin_port);
-
- pthread_t id;
- pthread_create(&id,nullptr,recv,ThreadDta);
-
- }
- }
ThreadData类内包含ip和端口,server函数实现也被放入了静态成员函数recv中,我这里只是演示一下,只会把最后版本放出来下面我们引入线程池来做优化,我们希望在accept链接前就创建好线程了,提高响应速度。
引进线程池
线程池:内部负责创建线程,我们外部构建任务,放入线程池中,内部线程池会去执行。
先来看看任务构建,外部传入一个套接字,ip,端口号,可调用对象构建任务,线程拿到任务后调用可调用对象。
-
- #define NUM 5
- class Task
- {
- public:
- using func_t = std::function<void(int,std::string,u_int16_t)>;
- Task()
- {
- ;
- }
- Task(int sock,std::string ip,uint16_t port,func_t func)
- : socket_(sock), ip_(ip), port_(port),func_(func)
- {
- ;
- }
- void operator()()
- {
- func_(socket_,ip_,port_);
- }
- int socket_;
- func_t func_;
- std::string ip_;
- u_int16_t port_;
- };
-
使用如下,构建任务,并且入队列,这里面还用了bind语法。

然后我大致说一下线程池内部实现,以及我们什么时候控制线程池去执行任务。成员如下,有任务队列保存任务,还有vector<Thread>保存多个线程。

我们线程池内存的也不是线程id,而是封装后的Thread类。代码如下,可以不关心内部实现。
- class Thread
- {
- public:
- typedef enum
- {
- NEW = 1,
- RUNING,
- EXIT
- }status;
- typedef void* (*fun_t)(void*);
- Thread()
- {
- ;
- }
- Thread(int num, fun_t fun, void* arg)
- :id_(0),fun_(fun),arg_(arg),status_(NEW)
- {
- name_ = "thread->" + std::to_string(num);
- }
- ~Thread()
- {
- ;
- }
- static void * threadRun(void*arg)
- {
- Thread* th = (Thread*) arg;
- th->fun_(th->arg_);
- return nullptr;
- }
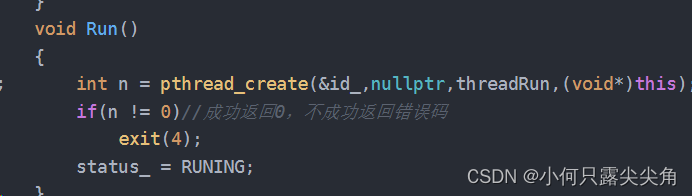
- void Run()
- {
- int n = pthread_create(&id_,nullptr,threadRun,(void*)this);
- if(n != 0)//成功返回0,不成功返回错误码
- exit(4);
- status_ = RUNING;
- }
- void join()
- {
- pthread_join(id_,nullptr);
- status_ = EXIT;
- }
- std::string getname()
- {
- return name_;
- }
- int getstatus()
- {
- return status_;
- }
- pthread_t getid()
- {
- if(status_ == RUNING)
- return id_;
- else
- {
- std::cout<<name_<<" not create ";
- return 1;
- }
- }
- pthread_t id_;
- std::string name_;//线程名
- status status_;//线程状态
- fun_t fun_;//线程执行函数
- void* arg_;//线程参数
- };
我们只需要知道我们要线程池初始化thread对象时要传一个执行函数和参数即可,i就是内部用来构建线程名的,不用关心。

外部通过线程池的静态函数获取单例对象。

线程池内调用Thread类内方法创建线程。

Thread类内的Run方法。
线程池内部实现。
- template <class T>
- class threadPool
- {
- threadPool(int size = NUM) // vp_存的自定义类型要有默认构造,不然这里初始化会找不到默认构造!
- : vp_(size)
- {
- pthread_mutex_init(&mutex_, nullptr);
- pthread_cond_init(&Consumer, nullptr);
- pthread_cond_init(&Productor, nullptr);
- }
- ~threadPool()
- {
- for (auto &e : vp_) // 复用Thread join方法回收线程
- {
- e.join();
- }
- pthread_mutex_destroy(&mutex_);
- pthread_cond_destroy(&Consumer);
- pthread_cond_destroy(&Productor);
- }
- threadPool(const threadPool<T>& sh) = delete;
- threadPool<T> operator=(const threadPool<T>& sh) = delete;
- public:
- void init()
- {
- for (int i = 0; i < NUM; i++)
- {
- vp_[i] = (Thread(i, threadRun, this));//this指针是给内部传参数的
- }
- }
- void Lock()
- {
- pthread_mutex_lock(&mutex_);
- }
- void Unlock()
- {
- pthread_mutex_unlock(&mutex_);
- }
- static void *threadRun(void *arg)
- {
- // pthread_detach(pthread_self());
- threadPool<T> *tp = static_cast<threadPool<T> *>(arg);
- // 执行任务
- while (true)
- {
- T data;
- tp->pop(data);
- data();
- }
- }
- bool Full()
- {
- return tasks_.size() == NUM;
- }
- bool Empty()
- {
- return tasks_.size() == 0;
- }
- void start()
- {
- for (auto &e : vp_) // 复用Thread Run方法创建线程
- {
- e.Run();
- }
- }
-
- void push(const T &data)
- {
- {
- LockGuard lg(&mutex_);
- while (Full())
- {
- pthread_cond_wait(&Productor, &mutex_);
- }
- tasks_.push(data);
- }
- pthread_cond_signal(&Consumer);
-
- }
- void pop(T &data)
- {
-
- {
- LockGuard lg(&mutex_);
- // 检查是否有任务
- while (Empty())
- {
- pthread_cond_wait(&Consumer, &mutex_);
- }
- data = tasks_.front();
- tasks_.pop();
- }
- pthread_cond_signal(&Productor);
- }
- static threadPool<T>* getthreadPool()
- {
- if(tp_ == nullptr)//减少加锁次数
- {
- LockGuard lg(&Poolmutex_);
- if (tp_ == nullptr)
- {
- tp_ = new threadPool<T>();
- tp_->init();
- tp_->start();
- }
-
- }
- return tp_;
- }
- std::queue<T> tasks_; // 任务队列
- std::vector<Thread> vp_; // 线程池,不能存指针,内部要解引用访问的
- pthread_mutex_t mutex_;
- pthread_cond_t Consumer;
- pthread_cond_t Productor;
- static threadPool<T>* tp_;
- static pthread_mutex_t Poolmutex_;
- };
- template<class T>
- threadPool<T>*threadPool<T>::tp_ = nullptr;
- template<class T>
- pthread_mutex_t threadPool<T>::Poolmutex_ = PTHREAD_MUTEX_INITIALIZER;

综上,外部线程获取单例线程池对象并且push任务到队列,内部线程pop任务出来并执行。由于我们的线程池并没有设计扩容功能,所以线程是有限的,而线程池内部线程执行的任务是我们外部传入的server函数,如果server函数是个死循环,就会导致无法执行其它客户端的任务,所以我们把server函数内的死循环改了。
五 守护进程
1 概念介绍
为什么要有守护进程呢?
因为我们目前起的进程如果把中端窗口一关闭,此时就会导致服务停了,那总不能让屏幕一直开着吧,所以我们让这个进程在后台运行,也就是守护进程化。
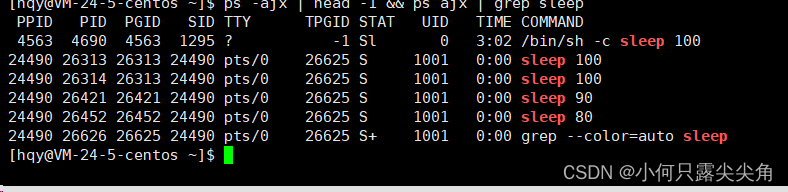
我们以前在讲进程状态的时候,用过下面这条命令,但是有几个成员一直没提及,那就是PGID和SID以及TTY。

PGID表是进程组,我们在命令行可以一次性起多个进程,这些进程都被归属于某个进程组被管理起来,进程组id一般是第一个创建的进程id,例如我们./server起了一个进程,这个进程内部也起了多个进程,此时这些进程都会被划分在一个进程组中,此时组长是server。
tty表示终端文件,终端就是我们打开xshell显示的那个窗口,所以当我们在命令行输入指令,都是云服务将结果输出到文件,文件经过网络发送到我们的主机上。
在一个终端下起的进程的终端文件是一样的,父进程是一样的,都是bash,而且还都属于某个进程组,进程组以第一个创建的进程id命名,不是bash。例如sleep 100 | sleep 100 &我们就在后台一次性起了两个进程,它们属于一个进程组。

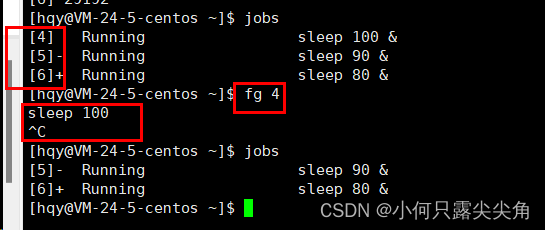
所以./server不再是启动一个进程了,我们应该说是启动一个任务,因为serve程序内部可能也会创建进程,所以需要一个更大的概念-任务来描述,jobs可以查看当前会话的任务。
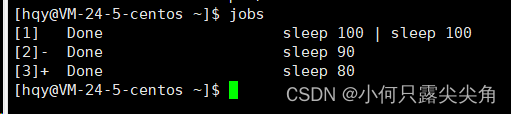
左侧的是任务码,我们可以把一个后台拉到前台运行,fg+ 任务码,然后ctrl+c就可以结束这个进程了。
将前台的任务回退为后台,Ctrl+z。
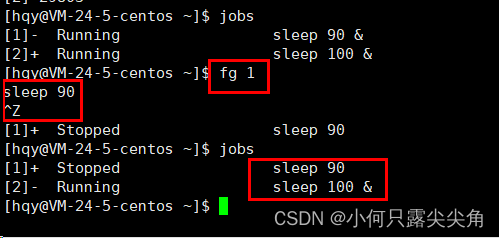
细节,当我们把sleep拉回前台运行时,此时bash命令就没了,因为我们./server就是把一个任务变成了前台,bash就变成后台,一个终端只能有一个前台进程,可以简单理解前台进程就是要和我们的键盘交互的,我们只能给一个进程喂指令,所以一个终端只有一个前台进程,当我们ctrl+z把前台进程变成后台进程后,此时bash命令行又回来了,因为它自动把自己变成前台进程了。
那什么是SID呢,我们称为会话id,22103其实是我们的bash进程,会话id以一个会话内的首进程id命名,什么是会话呢?当我们登录xshell时,linux就会建立一个会话,将bash以及bash创建进程管理在其中,有时候bash创建的进程(例如./server)内部又创建了许多进程,为了将server和它创建的进程关联起来,就有了进程组。
注销的理解:以前我们的电脑上是有个注销选项的,注销和重启是不同的,注销是删掉会话内的所有进程,重启则是整个系统进程都要重启了。守护进程化,就是对server进程独立开一个会话,这样用户注销就不会影响我这个守护进程了。使用如下接口。
返回值:会话ID。
2 守护进程化实现
- void Daemon()
- {
-
- pid_t ret = setsid();
- if((int)ret == -1)
- {
- cout<<"setsid err:错误码: "<<errno<<" 错误信息:"<<strerror(errno)<<endl;
- exit(SETSID_ERR);
- }
- }
然后我们在server.cc中调用一下,我们整个进程就变成守护进程啦。对进程组的其它进程无影响?如果我们是像这里一样实现的话,大概率会出错,首先我们这里只有一个server进程,
server进程就必定是组长,组长进程不能从会话中独立出去,为什么不能走呢,我想是因为组长进程内有着管理组内进程的方法,如果走了就管理不了其它的进程了,深究的话就得讨论为什么组长走了就不能管理其它进程了,难道我们不能再选一个组长吗? 当然我说的容易,实现起来可能比较冗余,所以就禁止我们对组长进程进行守护进程化。
优化如下。
我们在Daemon()函数中创建子进程,让父进程退出,此时子进程就变成孤儿进程了,被os接管了,此时这个孤儿进程不会是组长,此时孤儿进程再将自己独立出去。
变成守护进程后,一直在后台执行start函数,这个函数内是在接收链接,并且创建任务到队列中,让内部的线程池去执行通信任务。
然后我们还要忽略一些常见错误信号,让我们的守护进程不会随随便便就退出。
- signal(SIGPIPE,SIG_IGN);
- signal(SIGCHLD,SIG_IGN);
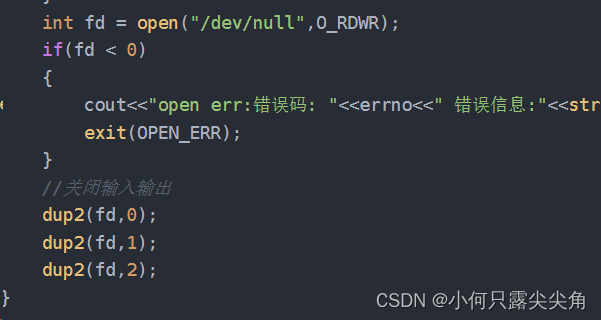
已经成为守护进程了,就不应该和键盘显示器关联了,我们可以直接关闭显示器和键盘文件,但是这样我们使用cout,cin会直接出错。所以我们打开一个特殊文件,让cin读不到数据,直接返回,写入的数据也会被丢弃。
- //守护进程化
- void Daemon()
- {
-
- 子进程去创建新会话
- if(fork() > 0)
- exit(0);
- pid_t ret = setsid();
- if((int)ret == -1)
- {
- cout<<"setsid err:错误码: "<<errno<<" 错误信息:"<<strerror(errno)<<endl;
- exit(SETSID_ERR);
- }
- int fd = open("/dev/null",O_RDWR);
- if(fd < 0)
- {
- cout<<"open err:错误码: "<<errno<<" 错误信息:"<<strerror(errno)<<endl;
- exit(OPEN_ERR);
- }
- //关闭输入输出
- dup2(fd,0);
- dup2(fd,1);
- dup2(fd,2);
- }
守护进程只能kill掉。


