
- 1git的常用语句_git语句大全
- 2【蓝桥杯】Python自带编辑器IDLE的使用教程_python蓝桥杯编译器
- 3BERT、BART、T5 等LLM大语言模型的比较分析_bart模型和t5
- 48种方案,保证缓存和数据库的最终一致性_缓存和数据库一致性同步解决方案
- 5【Transformer】什么是transformer? transformer输入输出是什么。transformer用于GPT的方法。tranformer的代码。chat-gpt_transformer编码器和解码器两个部分都包含输入该怎么理解呢
- 6RK3588 MIPIRX接收RGB888/RGB565/RGB666调试_rk3588 mipi dcphy dts
- 7C#调用Python程序的两种方法_c# python 相互调用
- 8谈谈程序员在传统企业的转型升级之路_传统公司程序员
- 9VMware vSphere 服务器虚拟化之二十七 桌面虚拟化之View中使用Thinapp软件虚拟化_thinapp的license
- 10【解决】Invalid hash given_fatal: invalid hash
四轴飞控DIY简明步骤介绍_手撸飞控硬件
赞
踩
1. 什么叫做新手?
Hi,童鞋们,新手(newbee)就是说啥都不知道的人。通俗的说,听说或者看到某个东西,有个概念。百度上新手链接:指第一次或者刚开始做某件事的人;没有技术或没有经验的工人;新参加工作的人。
2. 新手如何思考?
作为研发人员多年工作的经验以及训练,新手上手必须经历若干个阶段,这里大体做个通用梳理,随后我们用四轴飞控组装来做练习:
- 熟悉任务(了解)
- 101Lesson(训练)
- 任务说明(规格)
- 任务分解(分析)
- 任务执行(处理)
- 任务总结(回顾)
注:这种方法其实也是我们用于研发一个项目/产品,解决问题的一个常规步骤,是一种方法论。因为研发不可能一直在自己熟悉的领域,更多的是探索问题,分析问题,解决问题。因此,方法论对研发来说也极为重要。这其实也是为什么很多国外理工科大学更多强调的是模型的方法论,这是一种解决问题,化繁为简的一种基础思路。当然并不是说没有其他的方法,只是说这是一种比较正向的常规思路,而且比较容易确保过程的正确性。
3. 上手步骤
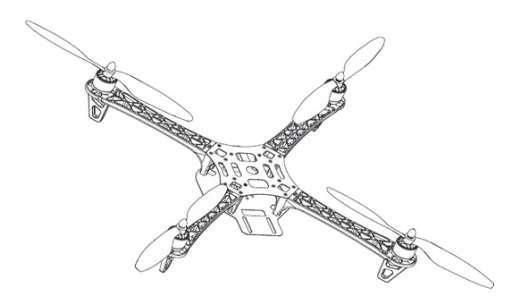
Step1:四轴飞控介绍
定义
四轴飞行器又称四旋翼飞行器、四旋翼直升机,简称四轴、四旋翼。这四轴飞行器(Quadrotor)是一种多旋翼飞行器。
运动原理
运动可以分为:垂直运动(throttle),俯仰运动(pitch),滚转运动(roll),偏航运动(yaw)
组成
通过百度多个网页,对比了解,可以大体上知道个大概组成。
注:这里只是做基础入门,因为拼凑组装的,飞起来可能不稳;新手控制不熟练,等因素都可能导致起飞失控后炸机(损坏),因此对于自组装的第一台不建议上云台(摄像机),图传,摄像头,遥测,GPS(磁力计)等。
- 电机(Motor)+ 电调(ESC,Electronic Speed Control)
- 导航模块(IMU,Inertial Measurement Unit):陀螺仪+加速度
- 飞控(FC,Flight Control):其中软件算法来解决空气动力学,自动巡航等飞控问题
- 动力源:可以采用可充电电池
- 遥控器+遥控接收机
- GPS(磁力计):通常应用与自动导航或者失控后自动回航等场景。
- 图传+摄像头:配合FPV设备进行第一视角控制操作。
- 云台(摄像机):航拍使用。
- 遥测模块:更多是配合地面站使用。
注:当然有更多的模块可以加装,这里简明介绍,差不多就好,感兴趣的朋友可以去百度或者VPN+Google
这里比较感兴趣的是飞控软件部分,大致可以分成几部分:飞控软件(嵌入式软件,含ESC固件),地面站(PC软件),分析工具(黑匣子数据分析工具等)。这个不是本章节主要内容,这里点一下,后续我们会进一步深入了解。
Step2:四轴飞控组装视频
关于飞控组装的视频很多,尤其很多都是套机买回来按照说明书装就是了。为了控制成本预算,这里想尽各种办法(二手淘)来凑一套,从学习和分析的角度,其实自组装需要考虑的问题更多(尤其涉及接口组装等细节问题)
这里有B站的一个视频可控参考:一分钟带你看完大疆高清FPV穿越机组装 [KAKUTE F7自习课]
Step3:四轴飞控新手规格定义
经过上面两个基本步骤的操作,大体上对于一个四轴飞控及组装有了基本的了解。接下去就是思考,自己装一台自己想要的四轴,怎么定义规格,满足哪些需求。
需求
- 从主要目的来看:深入了解飞控控制原理(FC+ESC代码,airbone code)
- 从学习和分析的角度:需要开源代码(Open Souce)和广泛的社区支持(Community Support)
- 从预算成本的角度:新手上手和代码调整大概率炸机是不可避免的
- 从实操学习的角度:DIY知识经验,远比Buy-And-Play更有意义
考量
- 飞控软件硬件通用性,健壮性,稳定性要求好,代码开源
- 机架要有一定的结构韧性,稳定,耐摔
- 动力要求有一定冗余性,便于后期加载其他模块
- 支持自动导航(巡航)功能
- 支持遥控手动控制空能
- 支持后期图传+摄像头,FPV(First Person View)功能
规格
根据上面的目的或者需求的角度,规格定义考虑如下:
- 飞控:Kakute F7 AIO V1.5
- 机架:F450
- 动力:翱云2212电机(正反一对)x 2 + ESC电调(20A) x 4
- 桨叶:正反自锁桨叶(一对) x 2
- 遥控:AT9S Pro + R9DS
- GPS:M8N (含磁力计)
- 电传:权盛电子 Radio Telemetry V5 433MHz/57600bps 100mW
- 电池:3S 2200mAh 25C
Step4:四轴飞控组件分解及接口定义
鉴于四轴飞控已经商业化(尤其是穿越机竞速、航拍),考虑Step3需求和规格的时候,已经很好的将规格直接定义到组件模块上。
因此,这里更多的考虑DIY过程各个组件之间的接口定义(硬件,软件,结构等)
注:暂不考虑GPS和电传
- 【软件】Paparazzi(最古老的开源飞控,2003年) & BetaFlight(穿越机飞控)
- 【结构】F450&飞控转接板+配套铜柱和螺丝螺母:飞控Kakute F7 AIO 30.5 x 30.5 mm与F450机架没有配套的固定孔位
- 【硬件】2.54mm双排 90度插针一排
- 【硬件】R9DS&飞控连线:2.54mm杜邦线 7~10cm长 (两端母头)3线(Tx/GND/VCC)
- 【硬件】香蕉头公母对 4mm x 8
- 【硬件】电机塑胶电源线(1.6平方) 10cm x 10:电调和飞控板8根,XT60和飞控板2根
- 【硬件】XT60公头 x 1
- 【硬件】电调&飞控 PWM控制线:2.00mm杜邦线 5cm长 (两端公头) 4根
- 【结构】扎带 2.5mm x 10cm x100:一包100根,怎么都够用
- 【硬件】电池扎带 x 5
注:商业化产品已经成熟,所以这里组件也基本上模块化了。根据规格做组件模块化分解也就不太需要,更多考虑是非套装机组件之间的接线,结构,软件等问题
Step5:四轴飞控组装
基本工具
-
焊接工具(烙铁,焊锡,松香等)

-
起子(六角,十字),各种型号

-
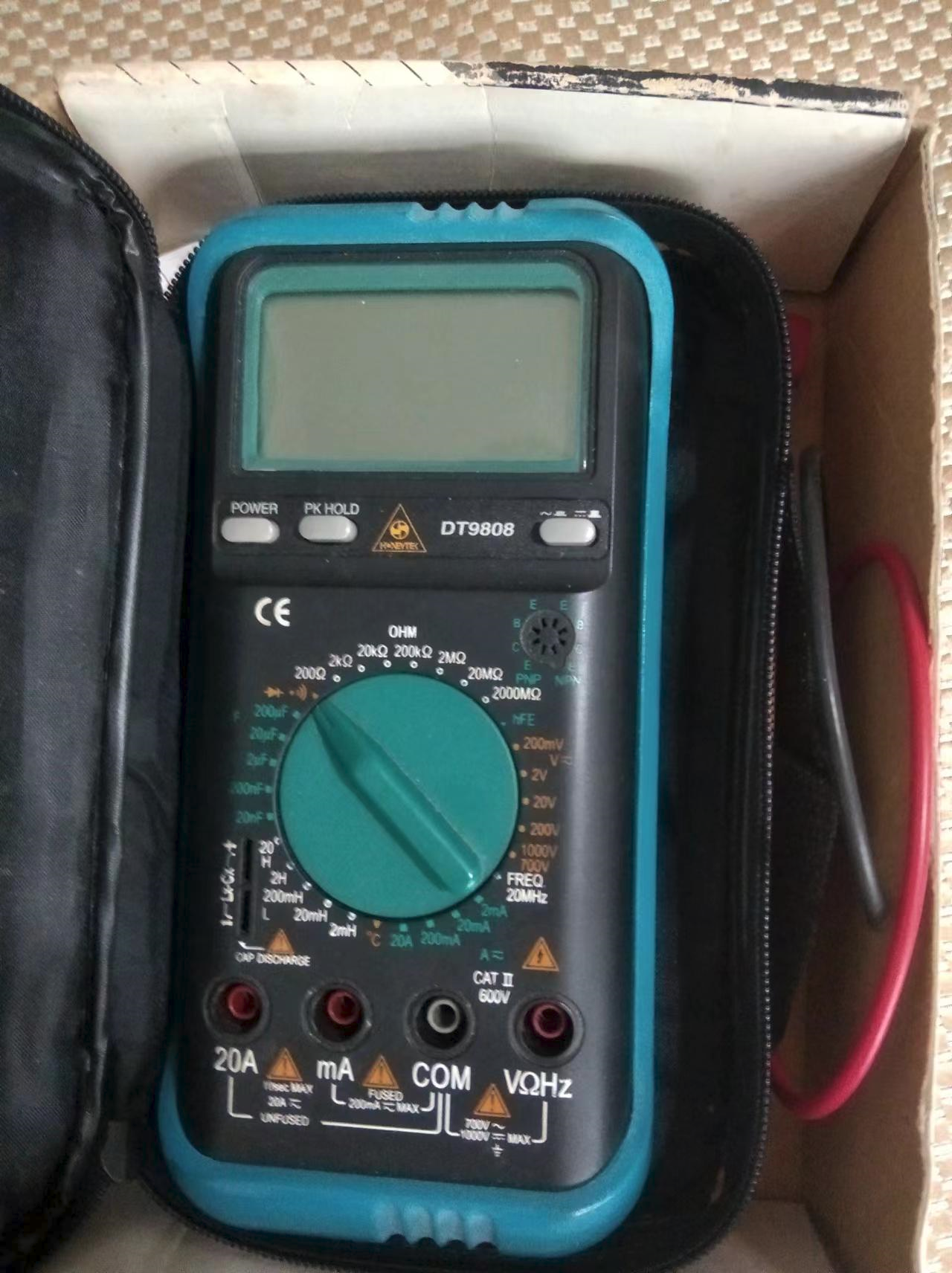
万用表
组装步骤
这里具体组装过程大致可以分为几个步骤,接线可以参考Kakute F7 AIO V1.5的接线指南。
- 【规划位置】考虑控制板、电调、电池放置的位置,以便规划后续接线和机架组装顺序(为了保护控制板,将控制板放在中心板和底板中间;电池放置在做上面;不使用脚架,低中心(CG)方便后续起飞调试)
- 【规划方向】两根白色机臂朝前,两个黑色机臂朝后;前后方向与飞控板前后方向保持一致
- 【焊接】焊接Kakute F7 AIO V1.5控制板上引线及插针,并使用万用表进行电源正负测试,避免正负极短路,保证同极导通无明显阻抗(黑色线负极,红色线正极)
– 2.54mm双排 90度插针(9x2) x 1
– 飞控&电池电源线+XT60公头 x 1
– 飞控&电调电源线+香蕉头母头 x 8
– 电调控制线 x 4
– 电调电源线+香蕉头公头 x 8 - 【安装】考虑固定电机到机臂(黑帽子反向锁紧,白帽子正向锁紧):
– 右后#1电机上黑帽;
– 右前#2电机上白帽;
– 左后#3电机上黑帽;
– 左前#4电机上白帽; - 【安装】制作F450&飞控结构转接板(这里采用了实验板打孔+铜螺柱螺母的方式固定)
- 【安装】将Kakute F7 AIO V1.5控制板按照飞控方向正确安装在转接板上
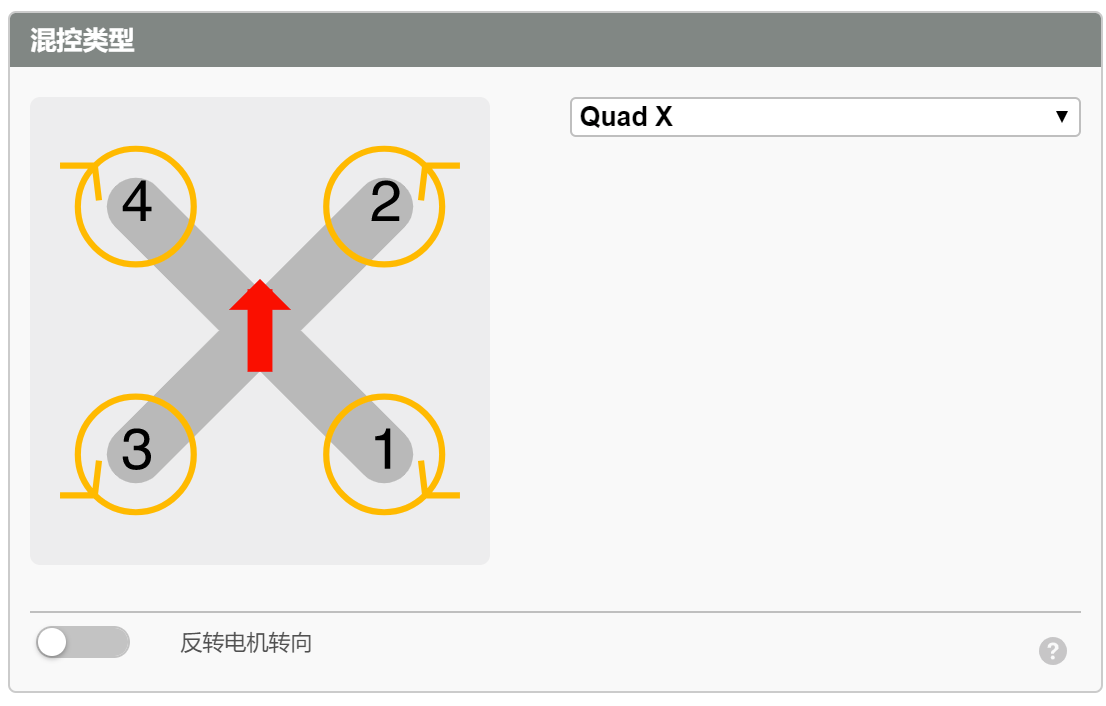
- 【安装】根据常规四驱(Quard X 1234)正配置,将机臂按照顺序装上
- 【安装】使用扎带固定R9DS接收机
- 【安装】使用扎带固定电调
- 【安装】根据Kakute F7 AIO V1.5接线指南,正确接线
– 电机&电调接线
– 电调&飞控板接线
– 接收机&飞控板接线 - 【安装】安装中心板
- 【安装】使用电池扎带,固定电池
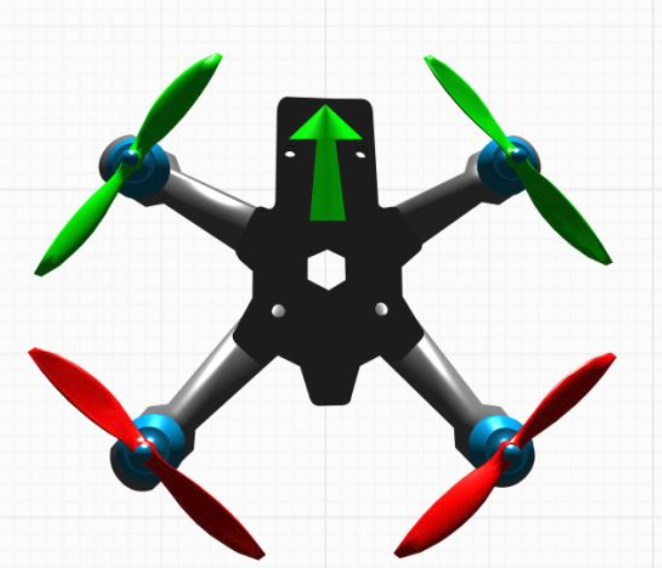
飞控方向和电机转向
实际效果

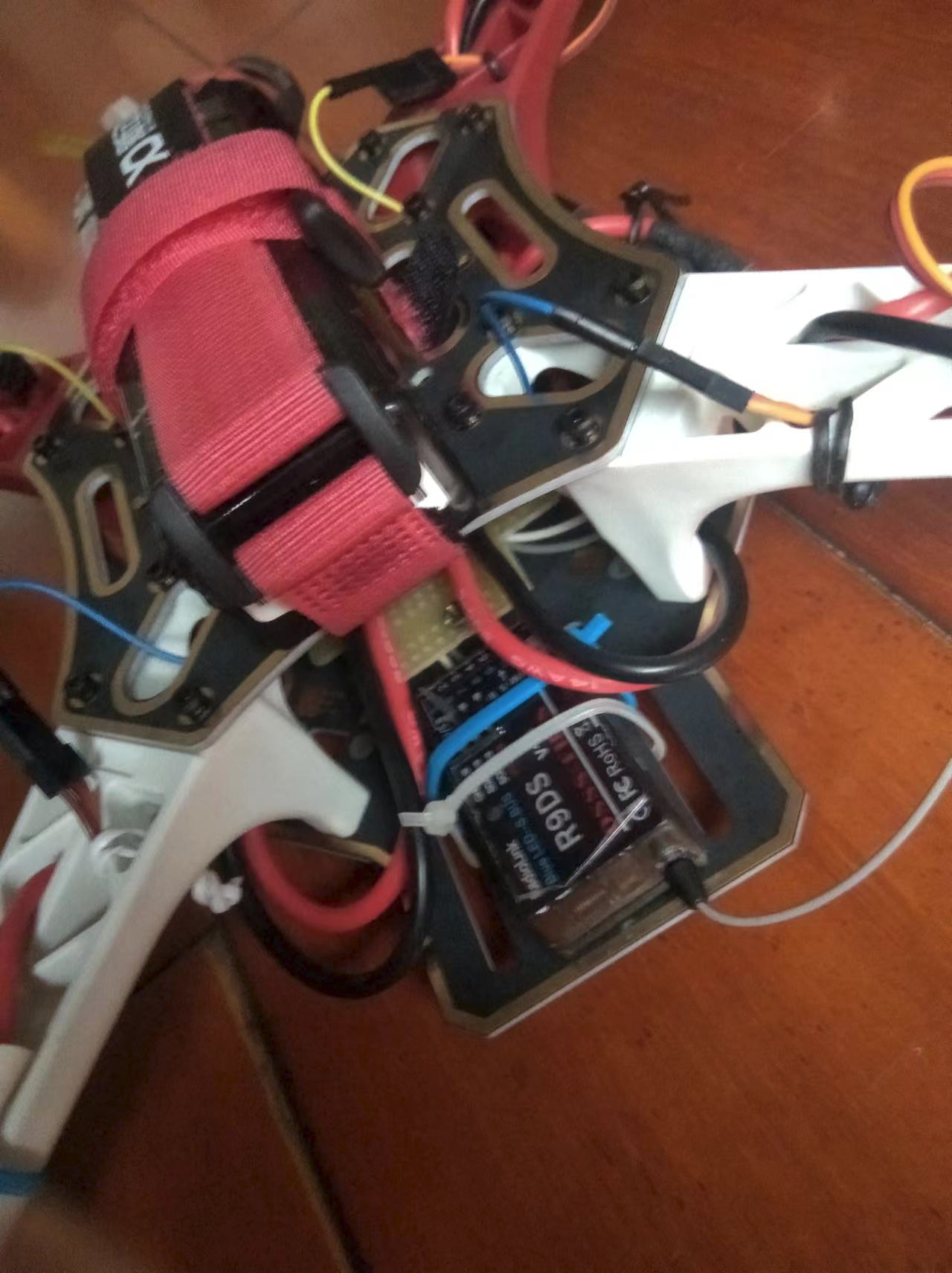
注1:侧视图可以看到接收机R9DS上面有一个实验板,这个就是做转接的,主要是因为飞控板30.5 x 30.5mm的固定孔位在F450机架上没有,这个主要是穿越机塔式固定孔位。
注2:由于这个控制板是放在底板和中心板中间,因此具有一定的保护作用,防止翻转炸机磕碰到控制板(价格相对昂贵)。
Step6:四轴飞控新手组装回顾
自此基本上新机组装已经完成,且正负极和短路问题也已经通过万用表检查正常,其实还是比较容易上手的。
为了后续调试起飞考虑,总体上来看,需要更多的关注以下几个细节:
-
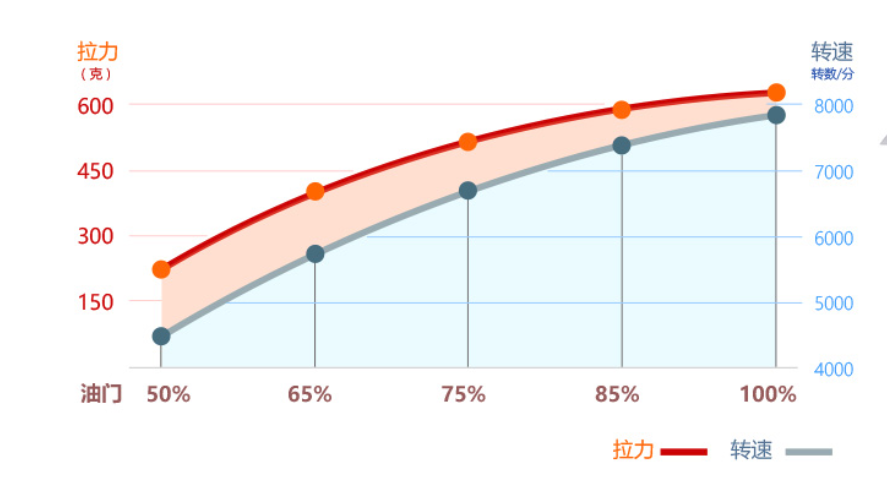
起飞重量:一开始并没有太多关注,因为2212电机大量的使用在F450机架上,而从实际的角度,还是需要更多的量化考虑。根据翱云电机规格,单电机最大600g,四个电机,起飞最大重量2400g。目前初步掂了下分量,模型大概1000g左右,所以整体冗余空间也不大,不过不做穿越特殊飞行,后续应该还行吧。
-
电机转向:一定要注意电机正锁紧还是反锁紧,这个和四轴(Quard X 1234)正向和反向配置有关,这里采用的是Quard X 1234 正向配置,桨叶始终会锁紧。如果配置不正确,会导致桨叶在旋转过程由于空气阻力往不锁紧的方向旋转,桨叶就飞了。这会直接导致飞机掉下来炸机,千万注意!!!要炸机,要炸机,要炸机!!!
-
遥控器配置:正常连接情况遥控器能通过飞控和地面站形成回路,请double check 遥感和地面站配置程序响应的一致性。(这里组装的飞控,AT9S Pro的Throttle和Pitch的舵机方向是反向的,如果没有配好,新手试飞也容易控制不好方向而炸机。当然怎么调试起飞也有方法,下次可以写个101教程)
注:这里其实已经初步调试起飞过了,当然也碰断了一个机臂,血的教训!!!,希望对大家有点帮助。
4. 补充资料
4.1 Kakute F7 AIO飞控
- Main System-on-Chip: STM32F745VGT6
CPU: 216 MHz ARM Cortex M7 with single-precision FPU
RAM: 320 KB SRAM
FLASH: 1 MB
- Standard racer form factor: 36x36 mm with standard 30.5 mm hole pattern
- ICM20689 Accel / Gyro (Soft-mounted)
- BMP280 Baro
- microSD (for logging)
- 6 UARTs
- 1 I2C bus
- 6 PWM outputs
- Built-in OSD chip (AB7456 via SPI)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
新老版本差异主要是IMU的硬件型号(新版本是MPU6000),新版本官方链接:http://www.holybro.com/product/kakute-f7-aio-v1-5/。ICM20689是新硬件,最高采样率可以达到32KHz,但是噪音较大,目前普遍软件上采用8KHz。
注:笔者手头的这款就是ICM20689的硬件版本。

