
- 1解决git秘钥过期_git error: your ssh key has expired.
- 2泪目!跳槽太不容易了,美团4轮面试,四个小时灵魂拷问,结局我哭了!_美团二面
- 3云计算工作流调度_云工作流调度
- 4PostMan环境变量、全局变量、动态参数使用
- 5基于FPGA状态机设计实现EtherCAT从站_fpga 从站
- 6【STM32】STM32CubeIDE 怎么启用 Cube.AI_stm32cubeide如何打开组件
- 7稳定的AI资源库,不用ChatGPT也可以流畅使用 | 全网漫游指南_各个知识问答ai网站各个
- 8Nginx性能优化_nginx cpu负载高
- 9论文阅读-Federated-Unlearning-With-Momentum-Degradation
- 10Swift 新 async/await 同步机制小技巧:消除“多余”的 await 关键字_swift async
机械狗控制算法_机器狗控制算法
赞
踩
一. MIT Cheetah特点

1.驱动器
Cheetah 2采用了定制的本体感受驱动器设计,具有高冲击缓解、力控制和位置控制能力。这种设计使其能够自主跳过障碍物,并以6m/s的高速跳跃,但其运动范围有限,只能进行矢状面运动。
Cheetah 3采用高扭矩密度电机和可后置单级行星齿轮减速器,以及低惯性腿,无需使用任何力传感器、扭矩传感器或关节或脚部的串联柔顺性,就可以通过本体感觉控制地面反作用力。Cheetah 3在每条腿上的三个自由度上都有几乎相同的驱动器,实现了对地面反作用力的3D控制。
2.计算和底层控制体系
Cheetah 3采用分层的计算架构。
3.控制结构

每个模块都被设计成模块化的,所以它可以很容易地被替换,而不需要对系统的其他部分进行任何修改。
力控制包括PD平衡控制器和MPC控制器,其中MPC是PD的替代方案,地面的接触力控制可以用MPC完成,它可以在较长的时间范围内预测轨迹结果,通过MPC规划地面的反作用力,实现代价函数最小化。但是由于方向动力学具有非线性、强耦合特点,因此求解MPC是具有挑战的。为了解决这个问题,对动力学模型采用基于时变的近似线性等式约束,使MPC问题能够形成一个二次规划。
带有前馈项的PD控制器用于计算关节力矩来跟踪每个脚的笛卡尔摆动轨迹。
二. SLIP介绍
SLIP(Spring-loaded Inverted Pendulum),弹簧负载倒立摆模型,1989年提出。良好的运动控制性能依赖于对仿生机器人准确的建模, 但由于仿生跳跃机器人系统一般具有较复杂的结构, 其运动模式灵活多样, 这样对整个机器人系统进行运动学和动力学分析变得比较困难, 因此很多研究人员希望通过比较简单的等效模型对跳跃机器人的运动过程进行简化, 从而建立起一种能进行有效控制的机器人模型。
SLIP最大的特点在于分析的是机器人步态在整个周期上的稳定性,有周期性的腾空相和着地相交替构成,如下图所示:

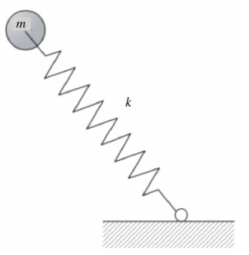
SLIP模型由一根轻质弹簧和一个质点组成,只需合理设置初始条件和少量参
数,就能够模拟人、袋鼠、青蛙等生物的跑跳前进运动。模型如下图所示:
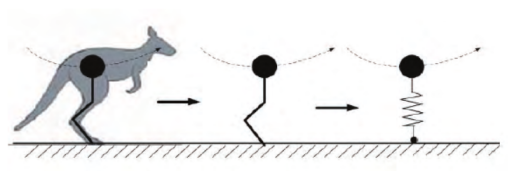
以袋鼠的运动为例对SLIP进行讲解:
由于袋鼠跳跃时其双腿的运动轨迹相同, 因此可以简化为单脚跳跃运动, 其每一个完整运动周期可以划分为着地和腾空的两个阶段。
由于袋鼠的腿的重量无法忽略不计,因此采用双质量SLIP模型对袋鼠机器人建模,如下图所示:
将袋鼠运动描述为如下形式,躯干部分质心等效位置在髋关节处, 记其质量大小为m, 弹簧腿的原长度为r0。假设腿部的质量集中在足部位置, 记其质量大小为m1, 质心与地面距离为r1, 腿部弹簧的刚度系数记为k。弹簧腿与身体的髋关节处相连接, 有一个转动自由度,髋关节部位的驱动器可以控制弹簧腿的转动以调整机器人的着地角度。


