
- 1二、MySQL建库建表的相关操作_mysql创建货位表
- 2fatal: unable to access ‘http://xxxx‘: Empty reply from server
- 3渗透测试神器Nessus使用教程「建议收藏」_nessus 批量导入数据
- 4PS给照片换背景色/日系滤镜/海边滤镜_ps修海边相片
- 5在anaconda中配置虚拟环境教程_anaconda虚拟环境
- 6VsCode搭建Java开发环境 vscode搭建java开发环境 vscode springboot 搭建springboot_vscode java
- 7程序员刚入职很痛苦_新入职的程序员,刚入职一个月,看不懂公司代码?我来教你一招...
- 8链表删除值为x的节点java,单链表的删除---在链表中删除值为x的元素 和 往链表中i位置插入一个数x的操作...
- 9scipy.signal.csd的参数如何选择
- 10测试人员与开发人员的比例究竟多少是合理的?
基础实验篇 | PX4控制器的外部通信_matlab和px4通信
赞
踩
PX4控制器的外部通信
01
实验名称及目的
PX4控制器的外部通信:在进行硬件在环仿真时,我们常常需要向设计的Simulink控制器中发送数据(传感器数据、故障触发、控制指令、参数调整等),同时接收一些感兴趣的数据。RflySim平台的Simulink控制器设计功能,提供了rfly_ctrl这一uORB消息来接收外部数据(UDP发送指定结构体到CopterSim的30100系列端口),同时提供rfly_px4这一uORB消息来向外发送数据(向40100系列端口发送特定数据)。本例程以外部发送的rfly_ctrl数据来作为遥控器输入,同时会将收到的数据向rfly_px4发送出去,回传给外部程序。
02
实验效果
在Simulink直接控制硬件在环仿真中的飞机。
03
运行环境
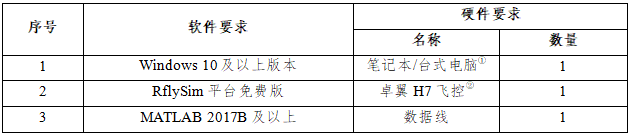
①:推荐配置请见:https://doc.rflysim.com/1.1InstallMethod.html
②:须保证平台安装时的编译命令为:droneyee_zyfc-h7_default,固件版本为:1.12.1。其他配套飞控请见:http://doc.rflysim.com/hardware.html 。
04
实验步骤
Step 1:
打开MATLAB软件,运行Init_control.m文件,同时将打开PX4ExtMsgReceiver.slx文件,在Simulink中,点击编译命令。

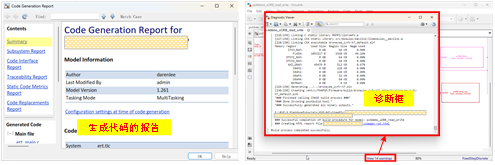
Step 2:
在Simulink的下方点击View diagnostics指令,即可弹出诊断对话框,可查看编译过程。在诊断框中弹出Build process completed successfully,即可表示编译成功,左图为生成的编译报告。
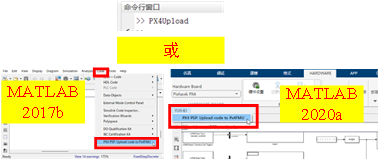
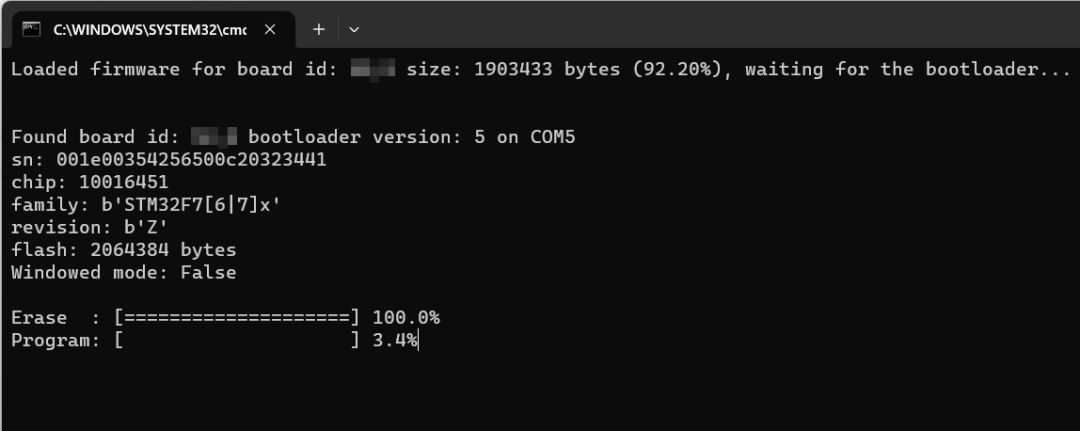
Step 3:
用USB数据线链接飞控与电脑。在MATLAB命令行窗口输入:PX4Upload并运行或点击PX4 PSP:Upload code to Px4FMU,弹出CMD对话框,显示正在上传固件至飞控中,等待上传成功。
Step 4:
打开QGroundControl软件。确认无人机机架设置如下:
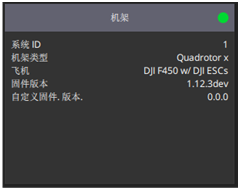
Step 5:
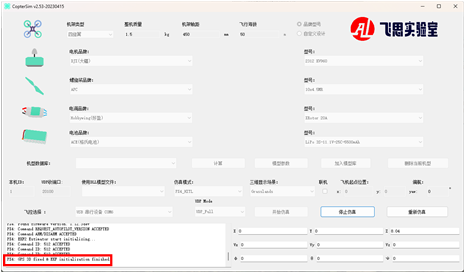
上传成功后,双击打开"*\桌面\RflyTools\HITLRun.lnk"或"*\PX4PSP\RflySimAPIs\HITLRun.bat"文件,在弹出的CMD对话框中输入插入的飞控Com端口号,即可自动启动RflySim3D、CopterSim、QGroundControl软件,等待CopterSim的状态框中显示:PX4: GPS 3D fixed & EKF initialization finished。
Step 6:
在MATLAB中运行PX4ExtMsgSender.slx文件,在运行过程中,滑动CH5的Slider模块至最大值1900处,代表飞机解锁,滑动CH3的Slider模块,来模拟飞机油门,实现飞机起飞动作,可在RflySim3D观察到飞机起飞。
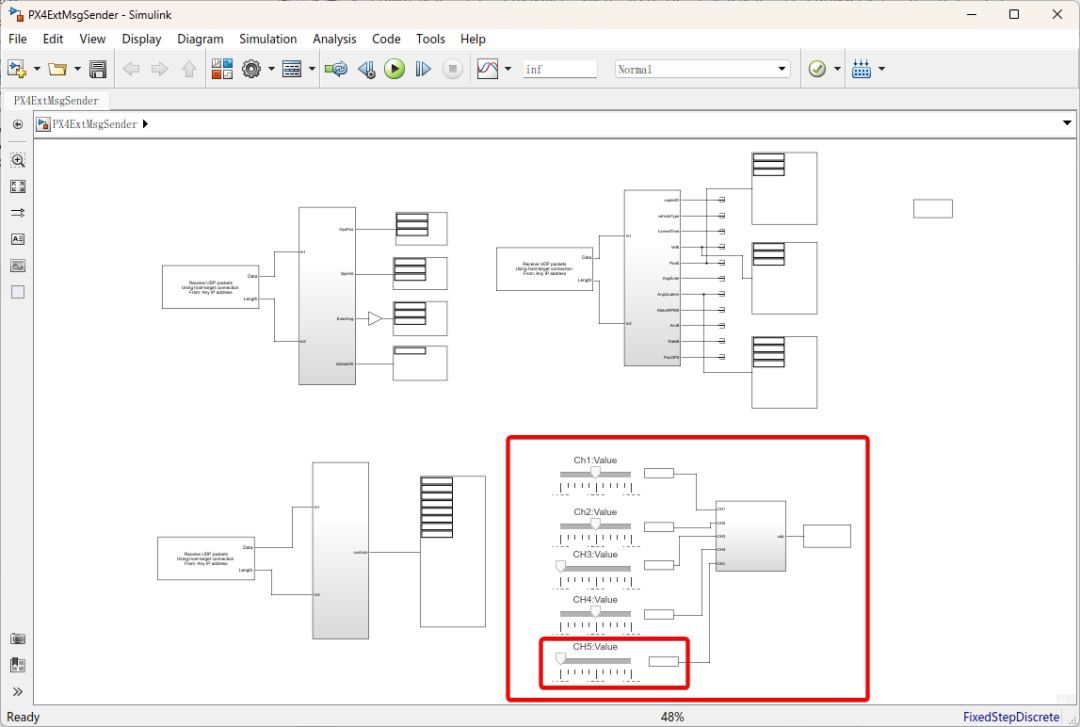

同时,在PX4ExtMsgSender.slx模型中,也可看到飞机的一些状态量,具体定义如下:



