
热门标签
热门文章
- 1nginx try_files的使用_try_files $uri 绑定二级路径
- 2经典进程同步问题(一)——生产者消费者问题_进程同步生产者消费者问题
- 3sqllab第十六关通关笔记
- 4用Kaggle免费GPU微调ChatGLM2
- 5MAC M芯片 Anaconda安装
- 6Nginx指向本地文件_nginx访问文件路径
- 7python实现的html转xlsx,xlsx转html_html传xlsx格式文件python服务端接受文件,
- 8response和request的详解+案例+代码分析_{"responsemetadata":{"requestid":"202402061906148e
- 9捋一捋Python中的数学运算math库之三角函数_python math库三角函数
- 10浮点数存储方式理解,浮点数和整数之间的转换_f32浮点数
当前位置: article > 正文
pytorch 修改预训练模型_full_model = resnet34(pretrained=true) # 提取全连接层前面的
作者:小小林熬夜学编程 | 2024-03-10 08:23:36
赞
踩
full_model = resnet34(pretrained=true) # 提取全连接层前面的部分 features = f
转载请注明作者和出处: http://blog.csdn.net/john_bh/
1. pytorch 预训练模型
卷积神经网络的训练是耗时的,很多场合不可能每次都从随机初始化参数开始训练网络。pytorch中自带几种常用的深度学习网络预训练模型,如VGG、ResNet等。往往为了加快学习的进度,在训练的初期我们直接加载pre-train模型中预先训练好的参数,model的加载如下所示:
import torchvision.models as models
#resnet
model = models.ResNet(pretrained=True)
model = models.resnet18(pretrained=True)
model = models.resnet34(pretrained=True)
model = models.resnet50(pretrained=True)
#vgg
model = models.VGG(pretrained=True)
model = models.vgg11(pretrained=True)
model = models.vgg16(pretrained=True)
model = models.vgg16_bn(pretrained=True)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
2. 修改全连接层类别数目
预训练模型以 resnet50 为例。
model = torchvision.models.resnet50(pretrained=True)
#提取fc层中固定的参数
fc_features = model.fc.in_features
#修改类别为10,重定义最后一层
model.fc = nn.Linear(fc_features ,10)
print(model.fc)
- 1
- 2
- 3
- 4
- 5
- 6
或者直接传入类别个数:
self.resnet = torchvision.models.resnet50(pretrained=False,num_classes=10)
- 1
3. 修改某一层卷积
预训练模型以 resnet50 为例。
model = torchvision.models.resnet50(pretrained=True)
# 重定义第一层卷积的输入通道数
model.conv1 = nn.Conv2d(4, 64, kernel_size=7, stride=2, padding=3, bias=False)
- 1
- 2
- 3
- 4
4. 修改某几层卷积
4.1 去掉后两层(fc层和pooling层)
预训练模型以 resnet50 为例。
nn.module的model它包含一个叫做children()的函数,这个函数可以用来提取出model每一层的网络结构,在此基础上进行修改即可,修改方法如下(去除后两层):
resnet_50_s = torchvision.models.resnet50(pretrained=False)
resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2])
self.resnet = resnet_layer
- 1
- 2
- 3
在去掉预训练resnet模型的后两层(fc层和pooling层)后,新添加一个上采样层、池化层和分类层,构建网络代码如下:
class Net_resnet50_upsample(nn.Module): def __init__(self): super(Net_resnet50_upsample, self).__init__() self.conv = nn.Conv2d(1, 3, kernel_size=1) resnet_50_s = torchvision.models.resnet50(pretrained=False) resnet_layer = nn.Sequential(*list(resnet_50_s.children())[:-2]) self.resnet = resnet_layer # print(self.resnet) self.up7to14=nn.UpsamplingNearest2d(scale_factor=2) self.avgpool=nn.AvgPool2d(7,stride=2) self.fc = nn.Sequential( nn.Linear(2048 * 4 * 4, 1024), nn.ReLU(inplace=True), nn.Linear(1024, 128), nn.ReLU(inplace=True), nn.Linear(128, 10)) def forward(self, x): x = self.conv(x) x = self.resnet(x) x=self.up7to14(x) x=self.avgpool(x) x = x.view(x.size(0), -1) x = self.fc(x) return x

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
4.2 增减多个卷积层
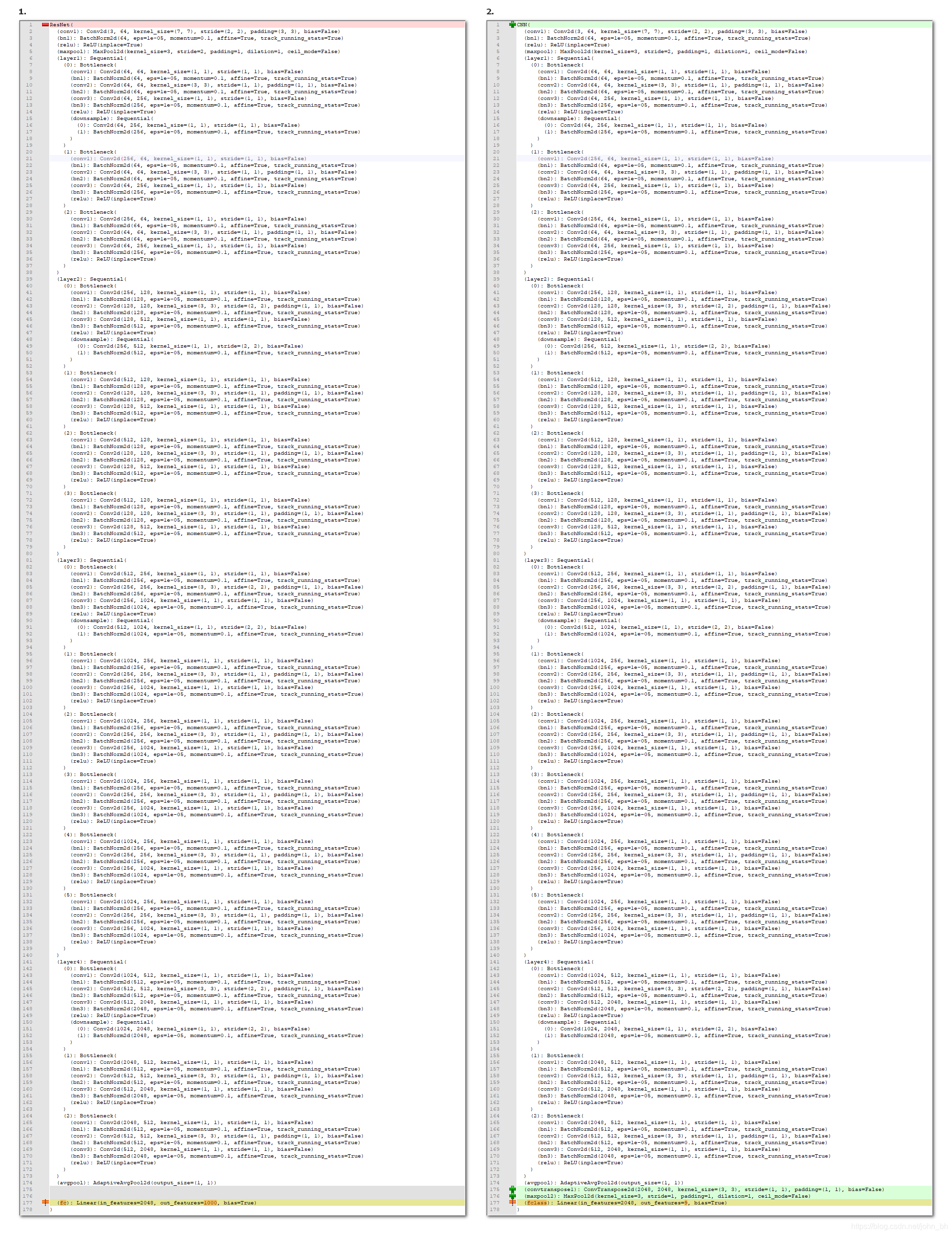
有的时候要修改网络中的层次结构,这时只能用参数覆盖的方法,即自己先定义一个类似的网络,再将预训练中的参数提取到自己的网络中来。这里以resnet预训练模型举例。
# coding=UTF-8 import torchvision.models as models import torch import torch.nn as nn import math import torch.utils.model_zoo as model_zoo #Bottleneck是一个class 里面定义了使用1*1的卷积核进行降维跟升维的一个残差块,可以在github resnet pytorch上查看 class Bottleneck(nn.Module): expansion = 4 def __init__(self, inplanes, planes, stride=1, downsample=None): super(Bottleneck, self).__init__() self.conv1 = nn.Conv2d(inplanes, planes, kernel_size=1, bias=False) self.bn1 = nn.BatchNorm2d(planes) self.conv2 = nn.Conv2d(planes, planes, kernel_size=3, stride=stride, padding=1, bias=False) self.bn2 = nn.BatchNorm2d(planes) self.conv3 = nn.Conv2d(planes, planes * 4, kernel_size=1, bias=False) self.bn3 = nn.BatchNorm2d(planes * 4) self.relu = nn.ReLU(inplace=True) self.downsample = downsample self.stride = stride def forward(self, x): residual = x out = self.conv1(x) out = self.bn1(out) out = self.relu(out) out = self.conv2(out) out = self.bn2(out) out = self.relu(out) out = self.conv3(out) out = self.bn3(out) if self.downsample is not None: residual = self.downsample(x) out += residual out = self.relu(out) return out #不做修改的层不能乱取名字,否则预训练的权重参数无法传入 class CNN(nn.Module): def __init__(self, block, layers, num_classes=9): self.inplanes = 64 super(CNN, self).__init__() self.conv1 = nn.Conv2d(3, 64, kernel_size=7, stride=2, padding=3, bias=False) self.bn1 = nn.BatchNorm2d(64) self.relu = nn.ReLU(inplace=True) self.maxpool = nn.MaxPool2d(kernel_size=3, stride=2, padding=1) self.layer1 = self._make_layer(block, 64, layers[0]) self.layer2 = self._make_layer(block, 128, layers[1], stride=2) self.layer3 = self._make_layer(block, 256, layers[2], stride=2) self.layer4 = self._make_layer(block, 512, layers[3], stride=2) self.avgpool = nn.AdaptiveAvgPool2d(output_size=(1,1)) # 新增一个反卷积层 self.convtranspose1 = nn.ConvTranspose2d(2048, 2048, kernel_size=3, stride=1, padding=1, output_padding=0, groups=1, bias=False, dilation=1) # 新增一个最大池化层 self.maxpool2 = nn.MaxPool2d(kernel_size=3, stride=1, padding=1) # 去掉原来的fc层,新增一个fclass层 self.fclass = nn.Linear(2048, num_classes) for m in self.modules(): if isinstance(m, nn.Conv2d): n = m.kernel_size[0] * m.kernel_size[1] * m.out_channels m.weight.data.normal_(0, math.sqrt(2. / n)) elif isinstance(m, nn.BatchNorm2d): m.weight.data.fill_(1) m.bias.data.zero_() def _make_layer(self, block, planes, blocks, stride=1): downsample = None if stride != 1 or self.inplanes != planes * block.expansion: downsample = nn.Sequential( nn.Conv2d(self.inplanes, planes * block.expansion, kernel_size=1, stride=stride, bias=False), nn.BatchNorm2d(planes * block.expansion), ) layers = [] layers.append(block(self.inplanes, planes, stride, downsample)) self.inplanes = planes * block.expansion for i in range(1, blocks): layers.append(block(self.inplanes, planes)) return nn.Sequential(*layers) def forward(self, x): x = self.conv1(x) x = self.bn1(x) x = self.relu(x) x = self.maxpool(x) x = self.layer1(x) x = self.layer2(x) x = self.layer3(x) x = self.layer4(x) x = self.avgpool(x) # 新加层的forward x = x.view(x.size(0), -1) x = self.convtranspose1(x) x = self.maxpool2(x) x = x.view(x.size(0), -1) x = self.fclass(x) return x # 加载model resnet50 = models.resnet50(pretrained=False) print(resnet50) cnn = CNN(Bottleneck, [3, 4, 6, 3]) #3 4 6 3 分别表示layer1 2 3 4 中Bottleneck模块的数量。res101则为3 4 23 3 # 读取参数 pretrained_dict = resnet50.state_dict() model_dict = cnn.state_dict() # 将pretrained_dict里不属于model_dict的键剔除掉 pretrained_dict = {k: v for k, v in pretrained_dict.items() if k in model_dict} # 更新现有的model_dict model_dict.update(pretrained_dict) # 加载我们真正需要的state_dict cnn.load_state_dict(model_dict) # print(resnet50) print(cnn)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
结果对比:
本文内容由网友自发贡献,转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

