
热门标签
热门文章
- 1基于Python爬虫湖南常德酒店宾馆数据可视化系统设计与实现(Django框架) 研究背景与意义、国内外研究现状
- 2faiss通用向量搜索服务玩转腾讯880万词向量_向量召唤测试方案
- 3目标检测:如何将VOC标注的xml数据转为YOLO标注的txt格式,且生成classes的txt文件_目标检测中如何将.xml文件变成.txt文件
- 4用C语言写一个简单的飞机大战游戏(用到easyx图形库)_easyx图形库 tool。h
- 5第一个深度学习入门项目——使用AlexNet网络实现花分类_基于alex的花分类
- 6论文怎么降低AI率:七步走向原创与高质量_研究生论文查不查ai率呀
- 7KafkaConsumer对于事务消息的处理
- 8Transformer: Training and fine-tuning(六)_transformers.from_pretrained batch
- 9探索LangChain4J:新一代自然语言处理库的创新实践
- 10x.ai刚刚宣布了Grok 1.5的发布,听说这次更新后的版本在推理能力和处理更长上下文方面都有了大幅提升
当前位置: article > 正文
二、yocto 集成ros2(基于raspberrypi 4B)
作者:小小林熬夜学编程 | 2024-03-24 09:37:05
赞
踩
二、yocto 集成ros2(基于raspberrypi 4B)
yocto 集成ros2
本篇文章为基于raspberrypi 4B单板的yocto实战系列的第二篇文章。
一、yocto 编译raspberrypi 4B并启动
本节我们将ros2机器人操作系统移植到我们的yocto系统里面。
1. 下载ros layer
上小节我们编译的yocto image是基于kirkstone分支的,所以我们也需要下载kirkstone分支的meta-ros layer:
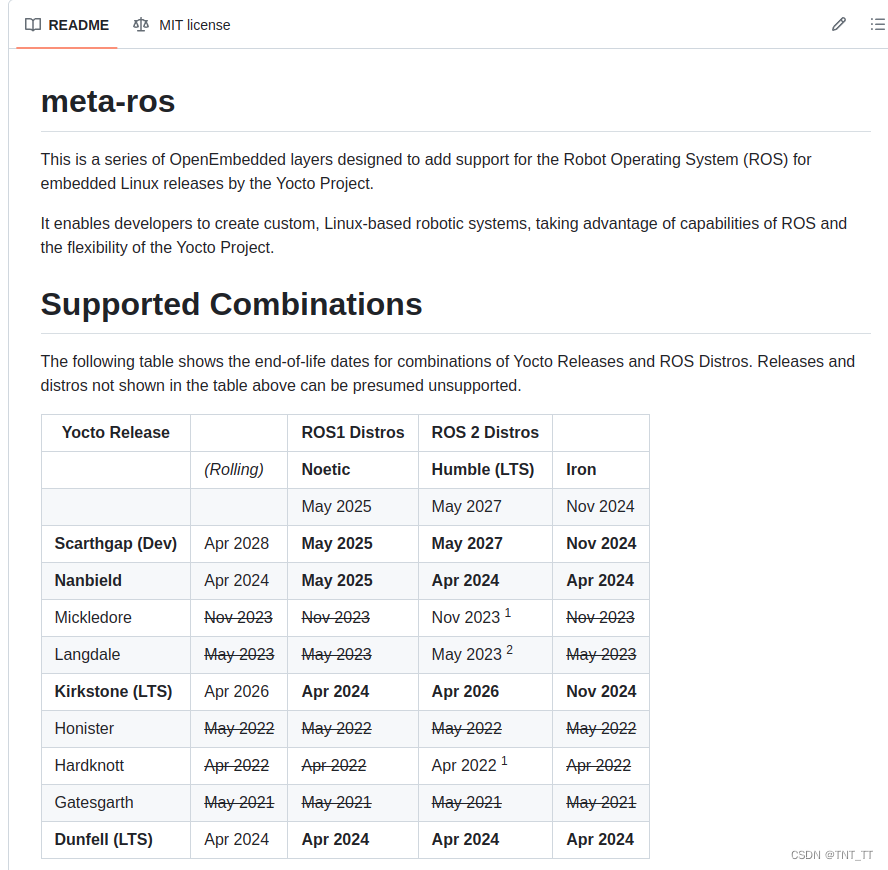
从上图可以看到kirkstone分支对应的ros2 LTS Distros是Humble版本,下面我们先下载相关源码:
在poky-kirkstone文件夹下执行如下指令:
- 下载meta-openembedded layer
meta-ros依赖meta-openembedded,所以需要先下载meta-openembedded代码
git clone -b kirkstone https://github.com/openembedded/meta-openembedded.git meta-openembedded
- 1
- 下载meta-qt5 layer
meta-ros依赖meta-qt5,所以下载meta-qt5代码
git clone -b kirkstone https://github.com/meta-qt5/meta-qt5.git meta-qt5
- 1
- 下载meta-ros layer
git clone -b kirkstone https://github.com/ros/meta-ros.git meta-ros
- 1

2. 编译集成ros
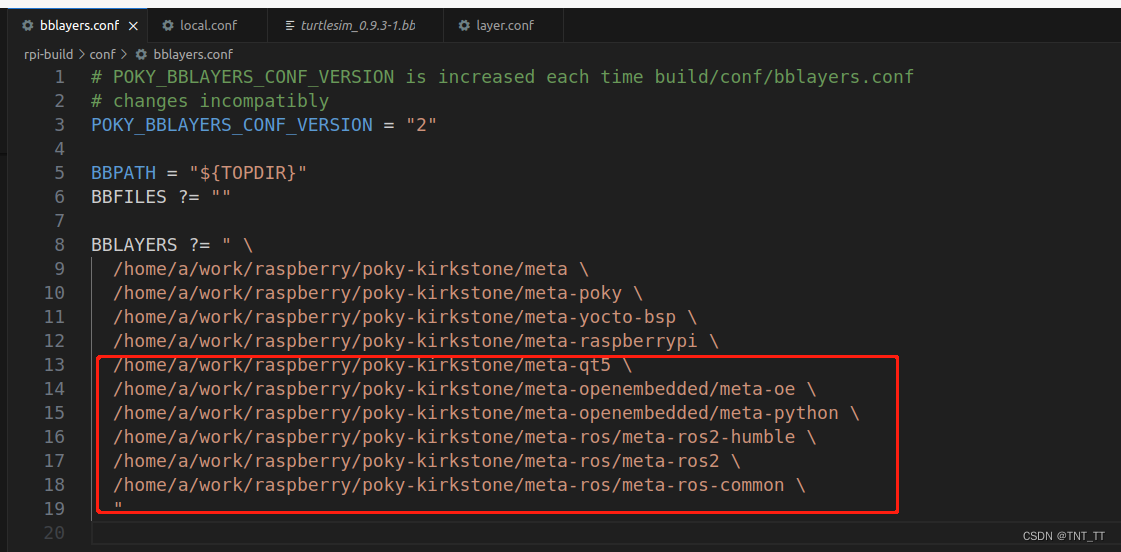
下载完成以后需要添加meta-ros 这个layer到bblayers.conf文件中:
尝试编译ros-image-core镜像,此过程比较慢,请耐心等待
bitbake ros-image-core
- 1
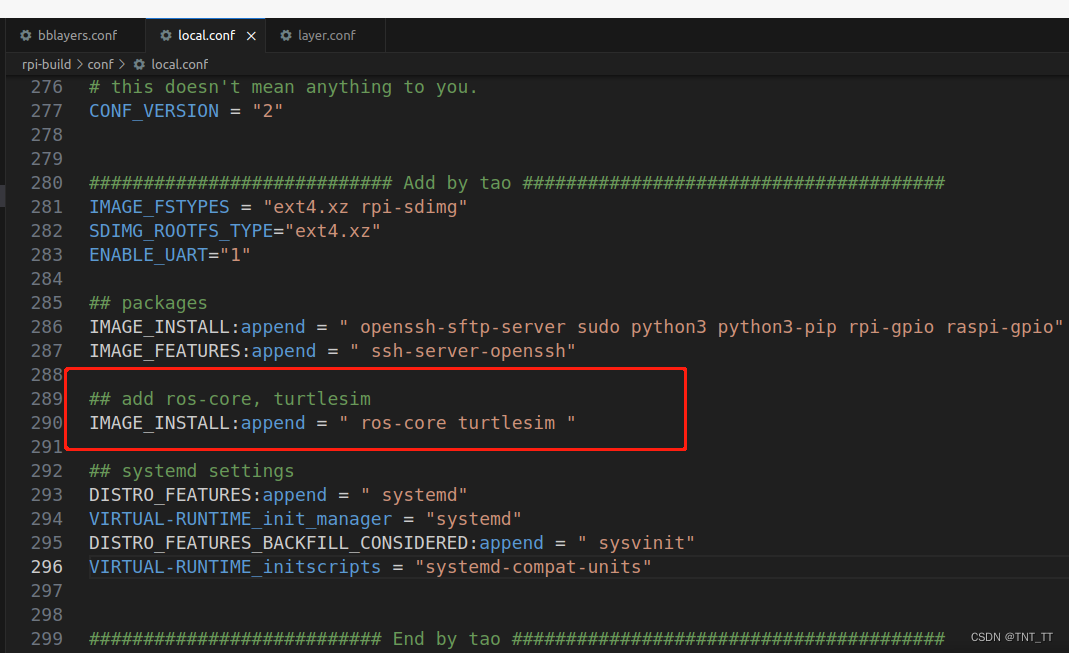
编译成功说明ros成功集成,下一步可以将ros-core 和turtlesim 两个包添加到local.conf,这样我们的生成的image就能用来测试ros通信:
添加完成以后在编译原来的image
bitbake core-image-base
- 1
3. 功能验证
编译完成就可以得到我们最新的rpi-build/tmp/deploy/images/core-image-base-raspberrypi4-64-xxxxx-rootfs.rpi-sdimg
执行如下指令刷写SD卡:
sudo dd if=/home/a/work/raspberry/rpi-build/tmp/deploy/images/raspberrypi4-64/core-image-base-raspberrypi4-64-20240313101906.rootfs.rpi-sdimg of=/dev/sda
sync
- 1
- 2
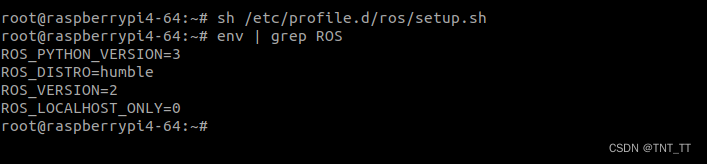
开机以后初始化ros环境,可以看到确实完成了ROS2 humble的集成:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/301470
推荐阅读
相关标签

