
热门标签
热门文章
- 1黑马程序员——Java基础---String类和StringBuffer
- 2[图解]SysML和EA建模住宅安全系统-01_sysml和ea区别
- 3力扣 1888. 使二进制字符串字符交替的最少反转次数(前缀和+滑动窗口)_现有一个二进制串,你可以进行任意次操作,每次操作选择相邻的三个位置,将其翻转。
- 4最详细的 K8S 学习笔记总结
- 5八、SpringCloud-RabbitMQ + Spring AMQP 消息队列_rabbitmq 版本控制
- 6Linux repo包安装Nginx
- 7手把手教如何用Linux下IIO设备(附代码)
- 8哈希表&位图&topk&一致性哈希算法_布隆过滤器 topk
- 92005-2020年A股数据挖掘:谁是最大的牛股?【附Python分析源码】
- 10OpenCV 图像处理一(阈值处理、形态学操作【连通性,腐蚀和膨胀,开闭运算,礼帽和黑帽,内核】)_我在vscode学opencv 图像处理一
当前位置: article > 正文
IMU姿态滤波算法——Mahony算法:原理与代码_mahony 六轴融合算法
作者:小小林熬夜学编程 | 2024-05-15 21:23:04
赞
踩
mahony 六轴融合算法
1 前言
Mahony算法常见的姿态融合算法,根据加速度计、陀螺仪、以及磁力计,融合计算机体四元数,计算速度快、精度较高。本文介绍六轴融合,即根据加速度计和陀螺仪数据,计算姿态。
我们需要计算的是机体的姿态。计算角度可以通过角速度积分,也可以通过加速度正交分解,但这两种方法都存在缺陷。角速度的误差会随着积分不断增大,而加速度存在高频噪声,因此希望融合两种数据。
2 算法
2.1 重力对齐误差
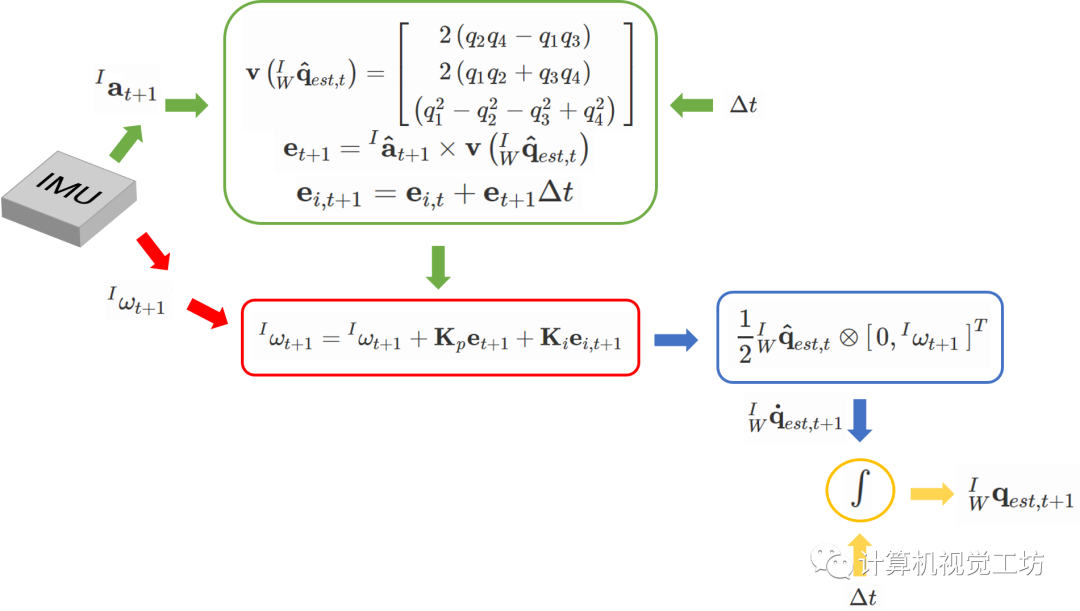
首先要指出的是,Mahony算法假设加速度计测量的加速度完全由重力提供,即物体本体运动产生的加速度可忽略不计。在这一假设下,我们假设当前时刻机体的姿态为,则将重力向量的表示转到机体坐标系下,应该为:,这里表示四元数对应的旋转矩阵:
进一步地,带入,得到
我们计加速度计测量得到的加速度,如果此时没有误差,应该有,但实际两个向量并不重合,存在一定的误差 。
为表示出,可以利用向量的叉乘:。因为叉乘的定义为:,当归一化为单位向量时,反应的就是角度。这里更准确的写为,下一时刻{t+1}时的误差为:
其中 为根据当前{t}时刻估计的角度四元数。再记这个误差的积分量为:
误差的积分量也参与了后续计算。
2.2 角速度融合
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小小林熬夜学编程/article/detail/575059
推荐阅读
相关标签

