
- 1微信小程序分享生成海报_小程序海报分享邀请好友
- 2win10搭建网络代理,供Linux使用_win10搭建代理服务器
- 3Kali Linux渗透_基于kali linux的渗透研究工作的目的
- 4几种常用限流算法之计数器算法/漏桶算法/令牌桶算法对比?_令牌桶 漏铜
- 5【Android】在WSA安卓子系统中进行新实验性功能试用与抓包(2311.4.5.0)_安卓子系统抓包
- 6接口测试 | 后端接口都测试什么?怎么测?
- 7浙江大学计算机保研条件_干货分享推免保研有“内幕”!华农学霸的“武功秘籍”来啦~(上篇)...
- 8代码版本管理工具repo&git常用命令_repo patchlog
- 9vue router 参数_让构建单页面应用变得易如反掌 Vue3中的router
- 10【机器学习】决策树(基础篇)_决策树基于基尼
[总线技术]汽车ECU网络传输-诊断协议测试-基于Canoe软件CAPL脚本编写_canoe自动化测试脚本
赞
踩
一.汽车电子电控结构
先介绍一下汽车电子电控的结构,汽车并不像电脑一样,只有一个CPU,而是分为多个“CPU”独立工作,就是由很多很多个控制器组成的,比如:ABS(防抱死系统)、AC(空调控制器)、VCU(整车控制器)、BMS(电池管理系统-电动/混动车才有)等等。每一个控制器负责不同的功能,把各个控制器安装在车身的不同位置,再通过线束连接,就组成了汽车。
汽车电子结构中比较重要的部分就是电源和通信了,先说下电源。一般来说汽车电源分为两种电,一种是30电,也就是常电,由蓄电池供电,是主要的用电器的用电来源;第二种是IG电,也就是15电,点火开关的电源,就是钥匙拧到ON档的时候才会有的电。
那各个控制器是如何进行通信的呢?
一般来说,汽车大部分控制器都是用的是Can总线网络通信,有少数几个功能不是很重要的控制器可以用Lin总线通信(例如:雨刷等等),每个汽车使用的都是不一样的。听说特斯拉没有线束?都是无线的?没有接触过就不说了吧。现在比较流行的是,使用以太网通信代替了Can通信,以太网通信的好处就是数据传输可以更多更快,例如OTA刷新程序的时候,刷新1MB的更新文件,用Can的话,要刷5分钟左右,用以太网刷新基本在十几秒就可以结束(实测),但是用以太网可能更贵吧,不过应该是以后的方向,数据量大的控制器更需要以太网,例如:多媒体、大屏这些都有UI界面的。
难道汽车上所有的Can通信的线都接到一起?并不是的!
整车上并不是把所有的Can线都连到一起的,也是需要分类的。一般分为5类:
1.PT CAN (PowerTrain CAN ) 动力总成CAN总线。
2.CH CAN (Chassis CAN) 底盘控制CAN总线。
3.Body CAN车身控制总线。
4.Info CAN ( Infomercial CAN ) 信息娱乐系统总线。
5.DiagCAN ( Diagnose CAN ) 诊断控制总线。
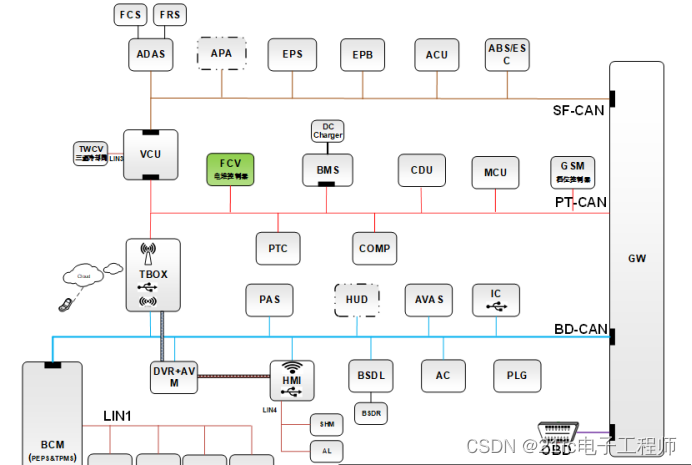
GW是网关,所有的Can总线都连接到网关上面。上图是某个汽车的网络拓扑,它没有信息娱乐Can,OBD就是诊断控制总线,接口一般就在驾驶员侧。
二.测试工具
一般来说,使用Can总线工具都可以,只要是Can总线的设备,都可以通过连接OBD接口读取数据。或者直接连接控制的Can总线。如果直接连接的是控制器的Can接口,那么就是与该控制器进行通信,如果连接的是OBD接口,那就是整车的数据。
介绍一下比较常用的工具Canoe,是Vector公司的产品,主要用于汽车Can总线测试,我这里使用的硬件设备是1640A,4路Can通道,2路Lin通道。对应的软件使用的是Canoe 11.0(软件License和硬件的价格大概在30W左右)。
这里说一下Canoe工具的用法,因为我就是用的Canoe进行诊断测试。
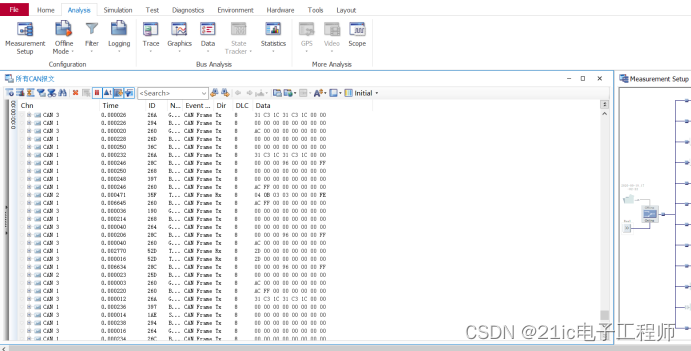
Canoe的强大的地方很多,其中一项就是有一个独有的编译开发软件CAPL,CAPL就是一个编译器,在CAPL里面编写代码,编译后可以在Canoe中运行。一般都是在CAPL编写自动化测试脚本,在Canoe中自动发送一些你想要的Can报文,或者判断接收的Can报文。下图是正在使用Canoe进行发送和接收报文。
三.自动化测试脚本建立
具体说一下如何建立CAPL自动化测试脚本。
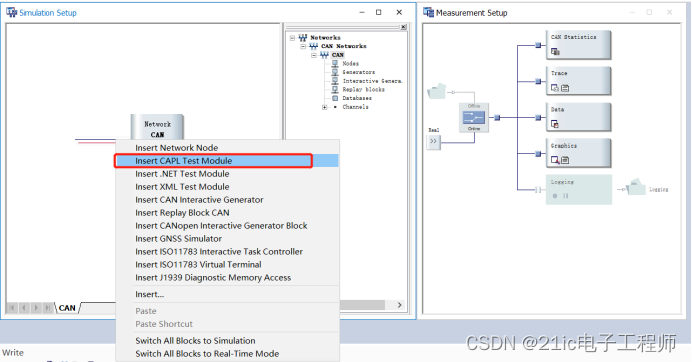
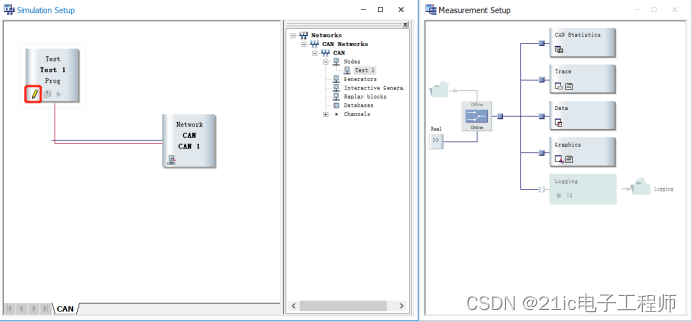
1. 首先打开Canoe,在Simulation中,找到Simulation Setup,点击。在红蓝线的地方右键,然后选择CAPL Test Modle。
2. 会出现一个Test 1的方块,点击小铅笔图标,弹出对话框,这时要新建一个CAPL的程序文件,扩展名为.Can。
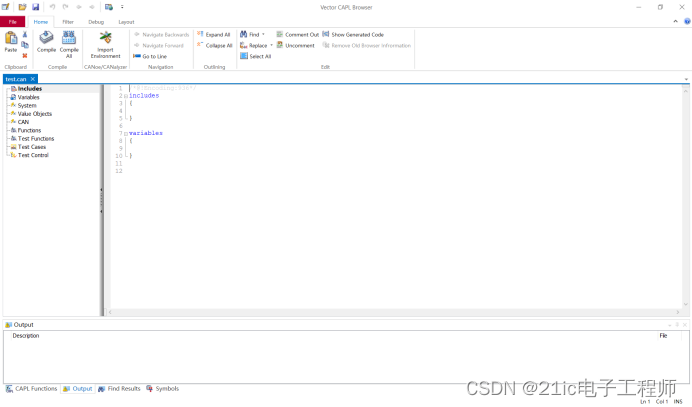
3. 输入新建的文件名后会自动弹出CAPL编辑的界面。之后就需要在这里编写测试脚本代码了。Includes{}里面是包含的头文件,variables{}是全局变量。
四.自动化测试脚本的编写
CAPL有一套自己的编程语言和方法,属于类C,学过C语言的入手超级快。基本和C语言差不多。
我们要进行诊断UDS相关的测试,所以首先要了解UDS诊断是什么?
UDS就是统一诊断服务,比如读取故障码、读取版本号、控制相关IO等等,诊断的东西说起来太多了,有需要的先去看一下ISO-14229和ISO-15765。
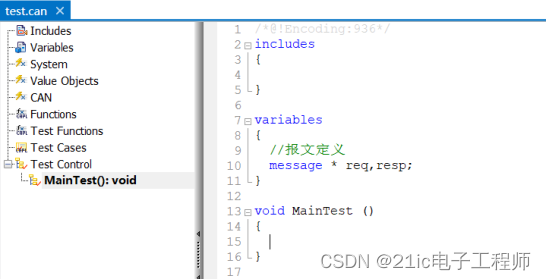
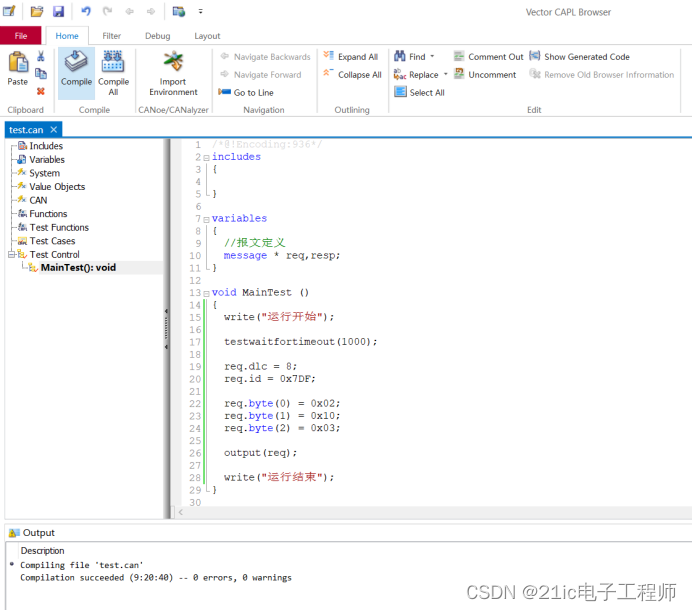
1. Includes{}里面是包含的头文件,我们还用不到,暂时不用管。variables{}是定义全局变量的地方,如果我们需要定义一些全局变量,就需要在里面定义了(不能像单片机那种在外面定义,只能在括号里面定义)。
2. 因为我们先要发送报文,所以首先要建立一帧报文。message * req,resp;这里message是报文的定义变量,建立了两个报文,一个req,一个resp,req是我们要发送的报文,resp是我们一会要接收的报文,先定义上。
3. 之后需要建立一个MainTest函数,类似单片机main()的原理,程序会在这个函数里面运行。
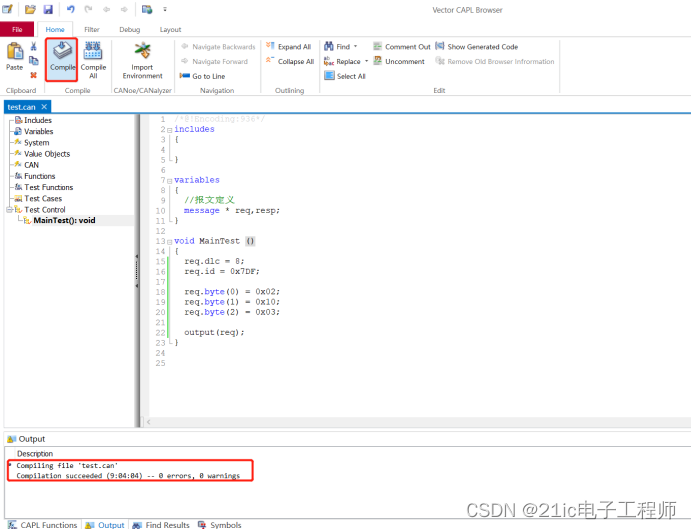
4. 之后就可以编辑报文内容并发送了。首先定义报文的长度为8,req.dlc=8;定义报文的ID为0x7DF(诊断的功能寻址请求ID),req.id = 0x7DF;然后定义报文8个byte的内容,这里定义的是诊断功能寻址进入扩展会话模式,02 10 03。
5. 最后就是发送报文了,outout()是发送报文的函数,直接调用即可,output(req);点击左上角Compile编译,OK,没问题,之后就可以进入Canoe中运行试试了。
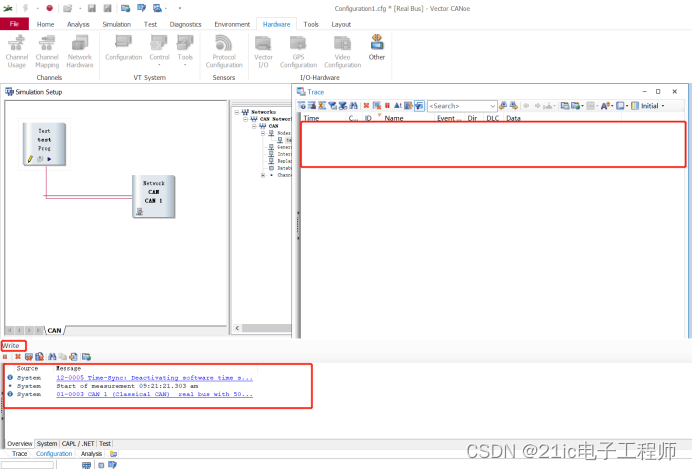
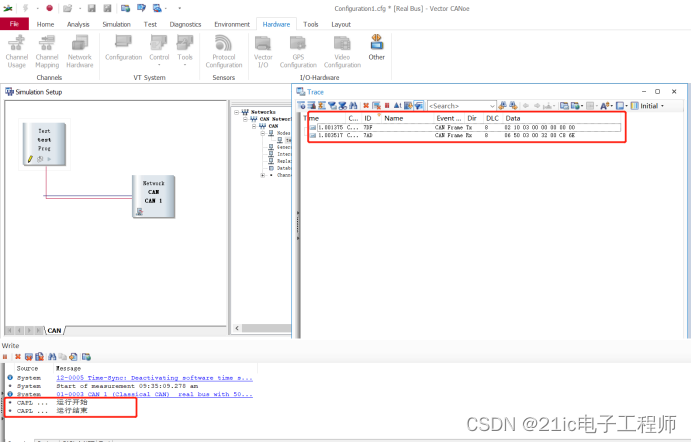
Canoe根据自己连接的通道配置好,点击运行。

运行后并没有发出我们编写的报文,为什么呢?
我们可以调试一下。
打印一些调试信息出来,使用write()函数,类似C的printf(),在MainTest的开始加上write(“运行开始”);之后加个延时函数testwaitfortimeout(1000),延时1秒,在最后增加write(“运行结束”);再次编译运行。
这里明显看出来,write窗口并没有打印出我们的调试信息,看来是这个Test模块没有运行。
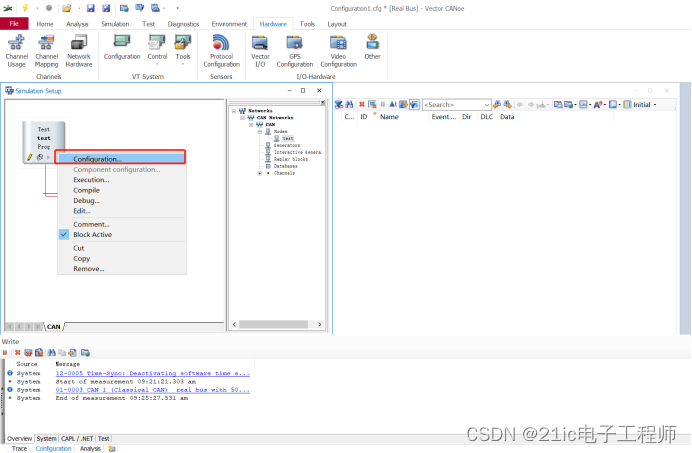
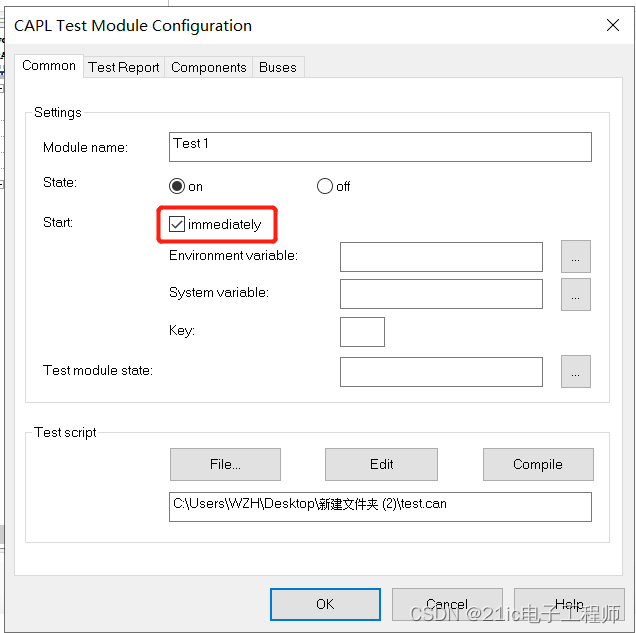
后来发现,CAPL模块还需要配置一下,让它立马运行。需要在test的方块上右键,选择Configuration,之后immediately打上勾就可以了,点击OK。
现在再运行一下看看。
OK,我们编辑的报文发出来了,并且控制器也给了响应的回复报文-06 50 03 00 32 00 C8 6E,进入扩展会话成功!
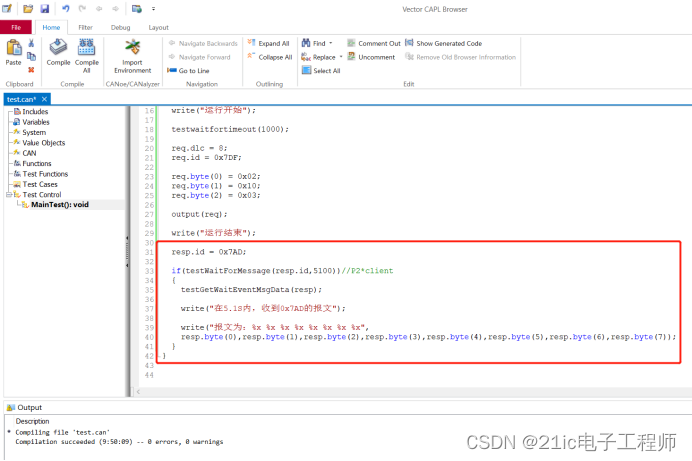
6. 接下来编写一下如何判断我们想要接收的指定报文。使用testWaitForMessage(resp.id,5100)函数,等待指定的报文,参数resp.id是我们要接收的报文ID,5100就是在5100ms内等待。testGetWaitEventMsgData(resp);获取这帧报文的内容,并通过write打印出来。
我们运行调试一下看看。
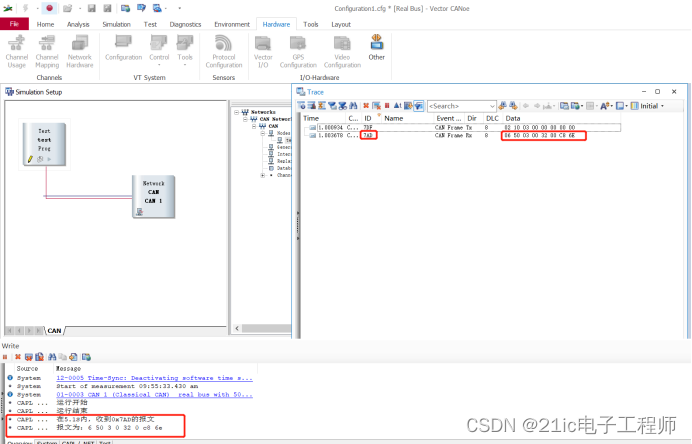
接收报文没有问题,数据也获取的正确。
五.总结
做了一篇汽车诊断测试脚本CAPL的编写与调试的简介,主要介绍了使用Canoe软件自带的CAPL插件,编写测试用例,根据发送和接收报文的处理,可以做一个复杂的自动化测试脚本,遍历测试等待。附件上传了Canoe 11.0的工程,有需要的朋友可以下载下来试试。欢迎大家提问。
---------------------
作者:小叶三千
链接:https://bbs.21ic.com/icview-3133628-1-1.html
来源:21ic.com
此文章已获得原创/原创奖标签,著作权归21ic所有,任何人未经允许禁止转载。

