
热门标签
热门文章
- 1奋斗到最后面临各种抉择,想问人生最终的价值追求应该是什么_翼真研究院 怎么样
- 2敬伟PS教程:掌握篇B08滤镜系列_敬伟教程滤镜系列21怎么做的
- 3Matlab:error_msg : maple: directory does not exist ------------------------------------------------_matlab mex 编译后 dose not exit
- 4《深入理解Java虚拟机》(第3版) 学习笔记,涵盖全书精髓_深入理解 java 虚拟机 第三版
- 5关于日期格式你必须知道的坑( yyyy-MM-dd HH:mm:ss),码着提醒自己
- 6双数组字典树_双字典数组怎么解决冲突问题的方法
- 7从OWASP API Security TOP 10谈API安全
- 8【跟随精读】OpenAI API文档阅读随笔 关联ChatGPT,GPT3.5, InstructGPT, GPT3.5 Fine-tune, prompt技巧(下)_gpt 3.5开 fine-tune 黑盒lora
- 9[备忘]phpstorm切换PHP版本_phpstrom 命令切换当前项目php版本
- 10Redis下载安装与配置
当前位置: article > 正文
Stewart 平台的数学运动解析_斯图尔特平台原理
作者:小蓝xlanll | 2024-04-14 15:48:53
赞
踩
斯图尔特平台原理
Stewart平台由2个刚性框架组成,由6条变长支臂连接。将底座作为参照系,以x、y、z为正交轴。顶部平台(以下均简写为平台)有它自己的正交坐标x ',y ', z ',相对于基座有6个自由度。平台坐标的原点可以由三个相对于基座的平移位移来定义,每个轴一个,三个角位移定义了平台相对于基座的方向,使用一组欧拉角来定义每个轴向的转角:
1、ψ(yaw,偏航角)为 z 轴方向上的旋转。
2、θ(pitch,俯仰角)为 y 轴方向上的旋转。
3、φ(roll,横滚角)为 x 轴方向上的旋转。
先只考虑第 ψ (yaw,偏航角)在 z 轴上的计算:

以上推导得旋转矩阵 Rz(ψ) 为

同理,可得 θ(俯仰)在 y 轴上的矩阵

φ 在 x 轴上的矩阵

结合整个旋转矩阵基于平台的运动就可得到

然后将矩阵置于Stewart平台中计算,支臂编号为 i

给出了锚点 Pi 相对于基准坐标系的坐标 qi 的方程

其中 T 为平移向量,给出平台框架原点相对于基准框架的位置线性位移,pi 为定义锚点相对于平台框架的坐标的向量。
同样,i 号支臂的长度公式为
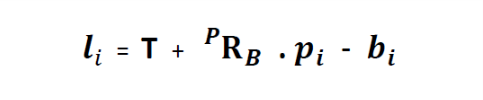
其中 bi 是向量,定义了下锚点Bi的坐标。这6个方程给出了实现平台所需位置和姿态的6条支臂的长度。
考虑正解运动学时,该表达式表示6个未知数中18个同时存在的非线性方程,表示平台的位置和姿态。在寻找这些方程的解方面已经做了大量的工作;在一般情况下,有40种可能的解决方案,尽管在实践中,这些解决方案中的许多并不实用。(说白了就是告诉你正解不合适)
后文似乎有个公式有些问题,等确认后再修改。待续...
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/422876
推荐阅读
相关标签

