
- 1知识图谱-知识融合工具(一):Falcon-AO【本体对齐】
- 2合合信息acge模型获C-MTEB第一,文本向量化迎来新突破_stella-mrl论文
- 3RDD的创建-Scala_rdd的创建sanla
- 4爬虫入门第1课:代理池概述及开发环境_代理池是什么
- 5BruCON 0x07 - Unified DNS View to Track Threats - Dhia Mahjoub & Thomas Mathew_tub.8
- 6并联四足机器人项目开源教程(三)--- 使用webots搭建仿真环境_webots模型
- 7MySQL基础:使用MySQL Workbench生成ER图_画er图 workbench
- 8深度解析:Kafka、ActiveMQ、RabbitMQ、RocketMQ的区别与比较_kafak activemq
- 9介绍importlib
- 10智能物联网时代:Web3连接智能设备的未来
MapTR论文笔记
赞
踩
MAPTR: STRUCTURED MODELING AND LEARNING FOR ONLINE VECTORIZED HD MAP CONSTRUCTION
目的
传统高精地图 通过一些离线的基于 SLAM 的方法生成,需要复杂的流程以及高昂的维护费用。基于 bev 分割的建图方法,缺少向量化 实例级的信息,比如说lane结构。为了获得向量化的 HD map,HDMapNet 将像素级的分割结果分组,需要复杂且耗时的后处理。VectorMapNet 将地图的元素表示成点序列,采用了层级式 coarse-to-fine 网络,并且利用了自回归的 decoder 预测 序列化的点集,需要较长的推理时间。
![![[attachments/Pasted image 20230806170047.png]]](https://img-blog.csdnimg.cn/84deb54ecacc44489fe6fc55bb54a494.png)
当前在线向量化的在线高清地图的构建方法的效率较低,无法应用到实时的场景。DETR 采用了简单的 encoder-decoder transformer 结构,实现了端到端的目标检测。本文的目的是设计一个 类似于 DETR 结构,高效的端到端的 高清地图的构建方法。
本文的主要贡献主要有两点:
- 对于地图元素的统一表示
- 针对这种统一表示给出了 一个端到端学习的网络结构
方法
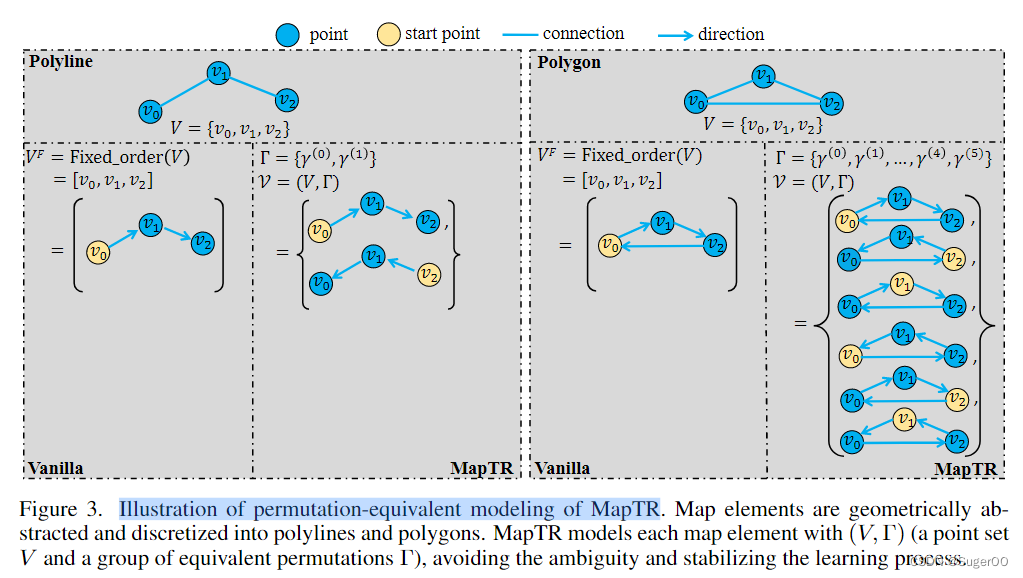
地图元素表示
地图的元素可表示成 折线 和 多边形 两种类别。这两种都可以用 点集 表示。然而点集的排列方式不是唯一的,存在多种排列方式。比如说 折线,它的起点和终点是可以互换的,代表两种方向,对于一些方向不敏感的元素,比如说人行道或者 车道线,两种方向都是可以的。如下图所示:
如果让网络只学习某一种排列方式,是不合理的。因此本文对于每一个地图元素都给出了所有的排列组合方式,用于后续网络的训练。
对于折线,根据起点位置的不同,有两种排列方式。对于多边形,需要考虑两个因素: 起点的位置 以及 连接的顺序(顺时针 或 逆时针),这样可以产生多种排列方式。
匹配方法
和 DETR 一样,MapTR 同时预测 N 个地图元素,N 是一个较大的数字,比一般场景中地图元素的数量要大。
MapTR 中需要使用两种匹配方法以实现 网络预测的元素 和 gt 某个元素的某一个具体的排列方式的匹配。本文的匹配方法有两个层级:Instance-level Matching 以及 Point-level Matching。
Instance-level Matching
在训练时,我们需要把 网络预测的元素 和 gt 匹配起来,这里也是使用的匈牙利匹配算法。
预测元素 和 gt 的 cost 考虑两部分:
元素的类别 以及 位置。类别使用的是 Focal loss,位置的loss使用的是 关于点位置的距离函数。
Point-level Matching
在 实例级的匹配之后,我们已经拿到了 预测元素 和 gt 的匹配关系,然后我们还需要做 点级的 匹配。
预测的点集 会和 gt 排列组合 中 每一个 排列方法 计算 距离,选择距离最小的一个配对。这里使用的是曼哈顿距离。
训练的 loss
- 分类 loss focal loss
- point2point loss,曼哈顿距离
- edge direction loss,point2point loss 只考虑了点,并没有考虑 和折线 和 多边形的 边。edge direction loss 加入了对 边方向的 监督。这里使用的是余弦相似度。
边可以用向量来表示(空间中两个点的坐标相减)
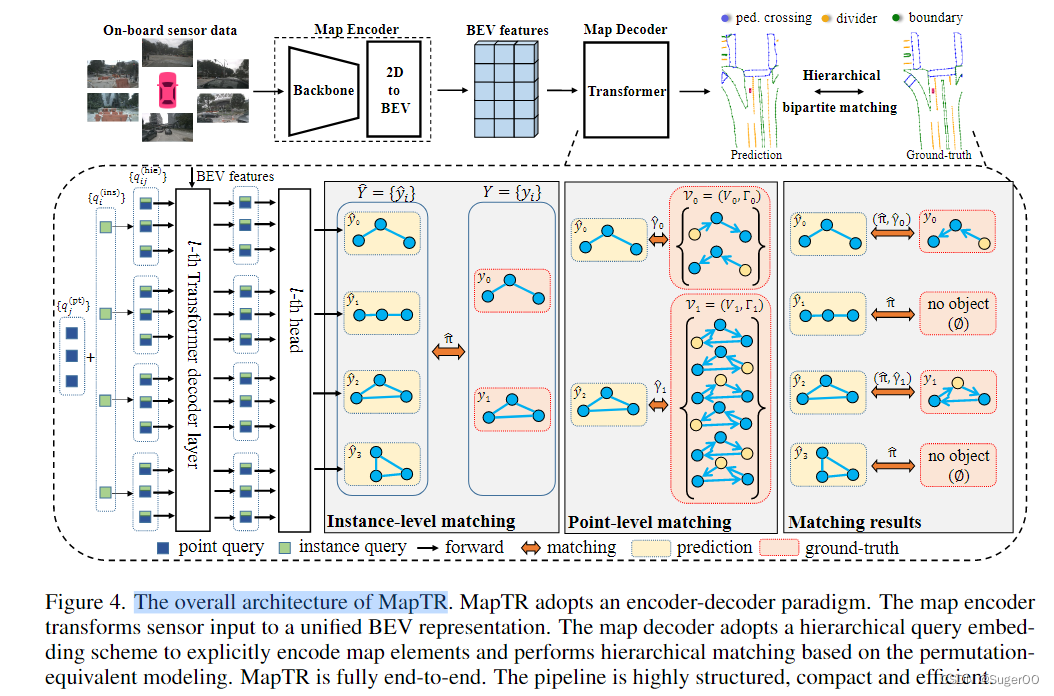
网络结构
MapTR 结构还是比较直接的 使用的是 bev + transformer decoder 结构
相关资料
https://www.bilibili.com/video/BV1uh4y1X7Ah/?spm_id_from=333.337.search-card.all.click

