
热门标签
热门文章
- 1java毕业设计区块链内容创作平台(Springboot+mysql+jdk1.8+maven3.39)
- 2Redis 多线程网络模型全面揭秘
- 3易基因|干货:m6A RNA甲基化MeRIP-seq测序分析实验全流程解析
- 4从关于用例规约与详细设计的讨论看待对规范的采纳_用例规约表写在详细设计
- 5HarmonyOS实战开发-实现一个计步器卡片应用_harmony系统运动怎么添加计时器
- 6JavaScript快速基础入门_javascript 快速入门总结
- 7source导入sql脚本报错:Failed to open file_source fail to open file
- 8JDK1.8源码之HashMap(二)——插入及扩容
- 9Open3D(C++)点云处理算法汇总(C++长期更新版)_open3d c++
- 10【大数据Hive】hive 多字段分隔符使用详解_hive字段分隔符
当前位置: article > 正文
基于冠豪猪优化算法(Crested Porcupine Optimizer,CPO)的无人机三维路径规划(MATLAB)
作者:小蓝xlanll | 2024-05-15 11:47:19
赞
踩
冠豪猪优化算法
一、无人机路径规划模型介绍
无人机三维路径规划是指在三维空间中为无人机规划一条合理的飞行路径,使其能够安全、高效地完成任务。路径规划是无人机自主飞行的关键技术之一,它可以通过算法和模型来确定无人机的航迹,以避开障碍物、优化飞行时间和节省能量消耗。

二、算法介绍
冠豪猪优化算法(Crested Porcupine Optimizer,CPO)由Mohamed Abdel-Basset等人于2024年提出,该算法模拟冠豪猪的四种不同保护机制:视觉、听觉、气味和物理攻击。第一和第二防御技术(视觉和听觉)反映了CPO的探索行为,而第三和第四防御策略(气味和物理攻击)反映了CPO的剥削行为。该算法提出了一种称为循环种群减少技术的新策略,以模拟并非所有CP激活其防御机制,而只激活那些受到威胁的CP的介词。这种策略促进了趋同率和种群多样性。2024最新算法:冠豪猪优化算法(Crested Porcupine Optimizer,CPO)求解23个基准函数(提供MATLAB代码)_冠豪猪优化算法与cs算法比较-CSDN博客
参考文献
[1]Abdel-Basset M, Mohamed R, Abouhawwash M. Crested Porcupine Optimizer: A new nature-inspired metaheuristic[J]. Knowledge-Based Systems, 2024, 284: 111257.
close all
clear
clc
dbstop if all error
warning ('off')
global model
model = CreateModel(); % 创建模型
F='F1';
[Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
pop=100;%种群大小(可以自己修改)
maxgen=100;%最大迭代次数(可以自己修改)
[fMin5,bestX5,ConvergenceCurve5] = CPO(pop, maxgen,Xmin,Xmax,dim,fobj);
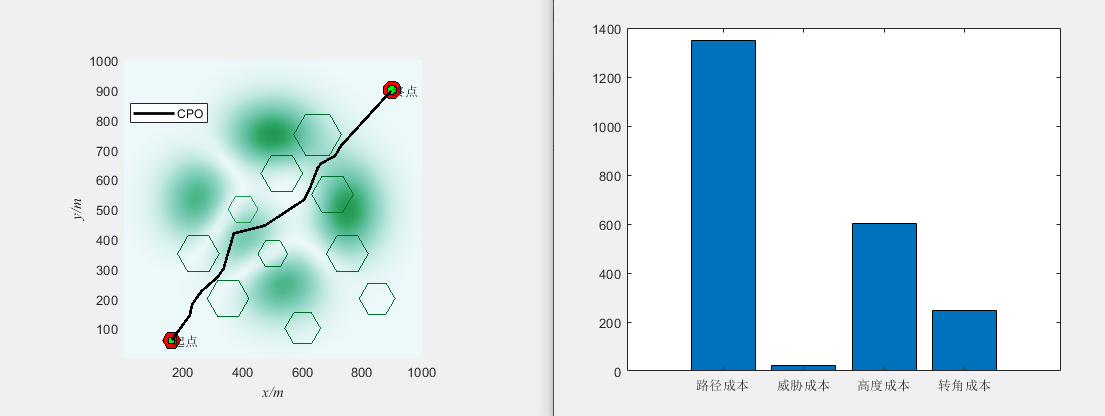
cost=MyCost(bestX5,2);%'路径成本','威胁成本','高度成本','转角成本'
%% 计算航迹坐标
BestPosition5 = SphericalToCart(bestX5);
%% 保存各算法的目标函数值及收敛曲线
save fMin5 fMin5
save ConvergenceCurve5 ConvergenceCurve5
save cost cost
%% 保存航迹坐标
save BestPosition5 BestPosition5
三、部分结果

四、完整MATLAB代码
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/572701
推荐阅读
相关标签

