
热门标签
热门文章
- 1红黑树【数据结构与算法Java】_数据结构红黑树java
- 2IOS证书申请流程
- 3皮尔逊、肯德尔和斯皮尔曼相关性分析的热力图python代码_python 皮尔逊相关图
- 4MySQL数据库查询重复数据办法_数据库查询三个字段数据相等的数据
- 5【单元测试】Junit 4(二)--eclipse配置Junit+Junit基础注解_eclipse junit4
- 6异常值检测(1)——箱线图四分位距和3σ
- 7C#中HttpWebRequest的用法_c# webrequest
- 8【算法系列篇】递归、搜索和回溯(二)
- 9打比赛?《CTF那些事儿》你不能错过。_base64相关的书籍
- 10偷偷曝光下国内这些软件外包公司!(2023 最新版)
当前位置: article > 正文
Simulink+carsim轨迹跟踪联合仿真_carsim和simulink联合仿真教程
作者:小蓝xlanll | 2024-06-14 16:13:02
赞
踩
carsim和simulink联合仿真教程
0.Intro.
CarSim作为自动驾驶控制算法的开发的仿真工具,广泛应用于在自动驾驶领域。特别是和Simulink联合仿真,可以有效验证算法的准确性,网上也有好多Carsim与Simulink联合仿真的教程,大家可以自行学习。本次主要实现自动驾驶轨迹跟踪算法(MPC)进行仿真验证,把自己的心得给大家分享一下,如有问题欢迎大家评论。【软件配置:MATLAB2018a+CarSim2019】
1.Simulink_Model.
其中Simulink模块采用模块化建模,可扩展多种控制算法,界面清晰直观主要包括:1、驾驶员控制模块;2、接口模块;3、偏差计算模块.
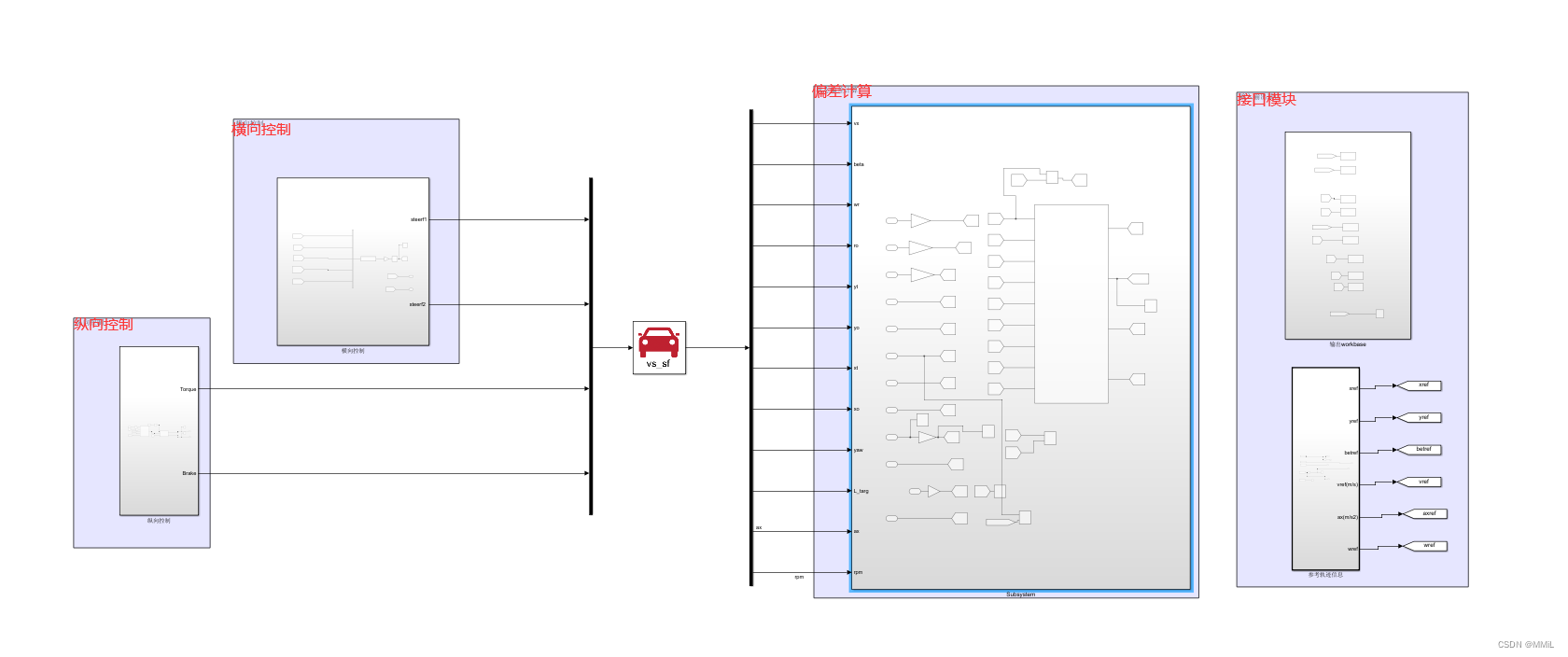
Model
驾驶员控制模块主要包括纵向控制(PID)和横向控制(MPC);接口模块主要用于参考轨迹输入以及仿真结果的输出;偏差计算模块计算车身状态偏差,作为驾驶员控制模块的输入。
1.1.Driver_Model
驾驶员模型主要采用横纵向控制,纵向控为双PID控制。对纵向位移与速度偏差进行控制。
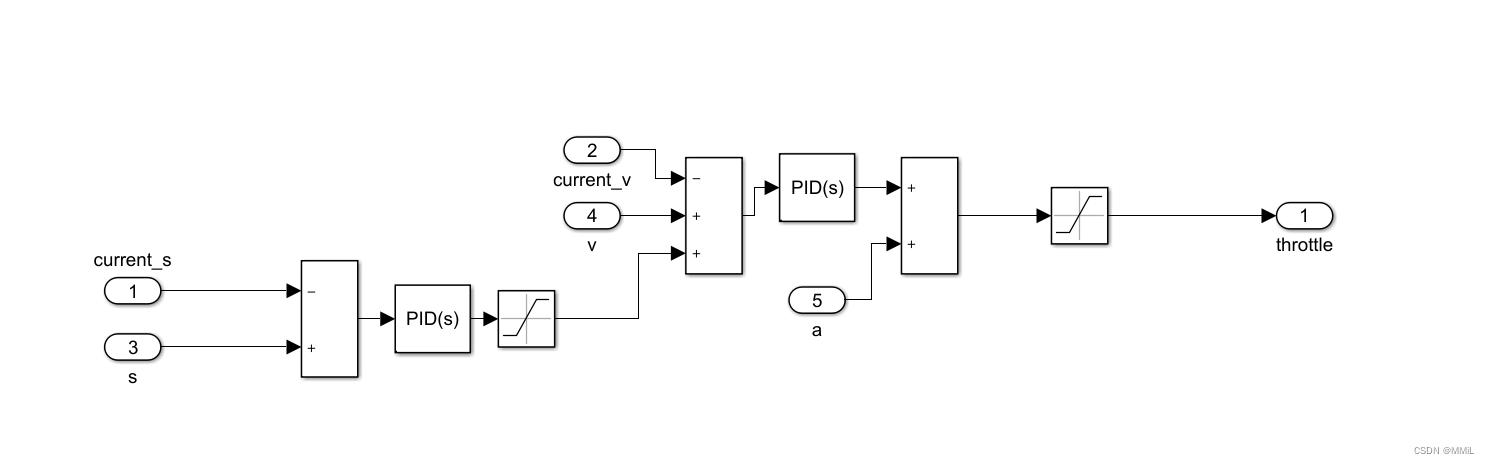
双PID
横向主要采用MPC控制,通过CarSim输出的车辆状态信息,计算出最优的前轮转角,以达到成功追踪目标轨迹。
Part-codes
- function [sys,x0,str,ts] = MPCDL(t,x,u,flag)
- switch
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小蓝xlanll/article/detail/718668
推荐阅读
相关标签

