
- 1使用python调用chatGPT(openai)接口_python调用chatgpt接口的
- 2iOS Localization 国际化设置_mjrefresh 国际化
- 3微信小程序自定义组件/插件等解析
- 4用python实现代码雨(电影黑客帝国里的效果,代码可直接运行)_python代码雨
- 5vite打包配置以及性能优化_vite打包配置brotli
- 6dpkg: error processing package *** (--configure)错误解决办法_dpkg: error processing package docker.io (--config
- 7分布式事务:2PC与3PC的区别
- 8云计算技术的产生、概念、原理、应用和前景_典型云计算平台介绍
- 9uniapp 开发小程序展开更多与收缩的动画效果_uniapp展开收起动画
- 10【v8初体验】利用yolov8训练COCO数据集或自定义数据集
Eigen矩阵运算库快速上手_selfadjointeigensolver
赞
踩
目录
做科研类项目,尤其是与线性优化,主成分分析有关的项目,势必需要用到矩阵计算及相关的优化工具。很多同学会利用matlab完成项目需求,这当然是一个不错的选择。但是,对于平台有一定要求的项目,尤其是那些基于C++开发的工程项目,使用matlab就会带来一些不便。我们希望有方便的矩阵开源工具,可以集成在项目中,以简化程序部署与使用的难度。这里就不得不提到大名鼎鼎的矩阵开源库,Eigen。今天这篇博客,就来跟大家介绍下Eigen部署与使用的基本知识,方便新手朋友能够快速掌握基于Eigen实现的矩阵计算与优化功能。
1. 配置
首先我们在官网上下载Eigen最新版本(V3.4)
3.4.0 · libeigen / eigen · GitLab

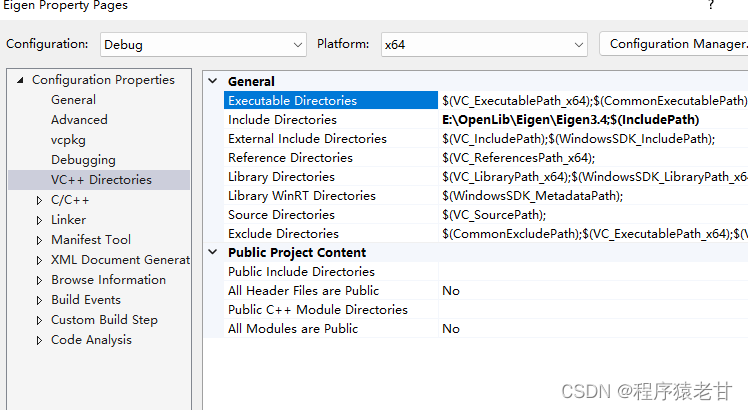
这里我们使用VS2022作为开发平台。配置非常简单,只要在VC++目录的include添加Eigen路径就可以。
这里贴一段测试代码:
- #include <iostream>
- #include <Eigen/Dense>
- using namespace Eigen;
- using namespace std;
- typedef Eigen::Matrix<int, 3, 3> Matrix3i;
-
- int main()
- {
- Matrix3i m1;
- m1 << 1, 2, 3, 4, 5, 6, 7, 8, 9;
- cout << "m1 = \n" << m1 << endl;
- Matrix3i m2;
- m2 << 2, 0, 0, 0, 2, 0, 0, 0, 2;
- cout << "m2 = \n" << m2 << endl;
- cout << "m1 * m2 = \n" << (m1 * m2) << endl;
- return 0;
- }

打印结果:

2. 初始化
在配置完Eigen后,接下来我们希望知道如何对向量和矩阵实现初始化。Eigen支持初始化方式很多, 参考博客Eigen库的使用小结,Eigen库的使用,Eigen初始化,我们列出几种供参考:
2.1 Array类
直接赋值
Eigen::Array<int, 3, 1> arr_1(1, 2, 3);流输入赋值
- Eigen::Array<int, 3, 3> arr_2;
- arr_2 <<
- 1, 2, 3,
- 4, 5, 6,
- 7, 8, 9;
指针方式赋值
- std::vector<int> vec_int{ 1,2,3,4,5,6,7,8,9 };
- Eigen::Array<int, 3, 3> arr_3(vec_int.data());
2.2 Vector类
Vector的赋值方法与Array基本相同。Vector可以被看做是一种特殊的Matrix。
- Eigen::Vector3f v1 = Eigen::Vector3f::Zero();
-
- Eigen::Vector3d v2(1.0, 2.0, 3.0);
-
- Eigen::VectorXf v3(20); //维度为20的向量,未初始化.
- v3 << 1.0 , 2.0 , 3.0;
2.3 Matrix类
与Array的初始化方法基本相同
- Eigen::Matrix<double,2,2> m;
- m << 1,2,3,4;
-
- Eigen::MatrixXf m1(2,3);
- m1 << 1,2,3,
- 4,5,6;
-
- Eigen::Matrix3d m2 = Eigen::Matrix3d::Identity();//Eigen::Matrix3d::Zero();
-
- Eigen::Matrix3d m3 = Eigen::Matrix3d::Random(); //随机初始化
2.4 Vector赋值
有的时候,我们会将数据存储在C++的数据结构vector中。此时,我们希望将vector的数据转换为矩阵,并进行相应计算。除了使用指针方式,我们还可以直接将vector的数据拷贝到矩阵中。
- std::vector<std::vector<double>> LX;
- MatrixXd m_Lx(LX.size(), 3);
- for (int i = 0; i < LX.size(); i++) {
- m_Lx(i, 0) = LX[i][0];
- m_Lx(i, 1) = LX[i][1];
- m_Lx(i, 2) = LX[i][2];
- }
假设LX是一个点云数据,每一个点是一个三维向量。对应建立的MatrixXd m_LX即与LX具有相同的维度,即将C++的vector转换为eigen的matrix。
2.5 高级初始化
参考matlab,eigen也提供了一些功能丰富的高级数据初始化方法,包括对行列向量的独立赋值,块赋值等。这里我们列出一些示例代码,供参考。
列向量赋值
RowVectorXd rv1(1,2,3);块赋值
对m4进行计算,并按块赋值给m5,输出m5:
- MatrixXf m4(2,2);
- m4 << 1,2,3,4;
- MatrixXf m5(4,4);
- m5 << m4, m4 / 10, m4 * 10, m4;//将m5分了四块赋值

更加精准的赋值,首先输入第一行: 1, 2, 3; 之后按照block的信息,在矩阵的第二行,第一列插入一个2*2的子矩阵,4, 5, 6, 7;最后,在第三列,最后两个位置tail(2), 插入6, 9。可以看到,上述操作实现了对一个矩阵分块精准赋值。
- Matrix3f m;
- m.row(0) << 1,2,3;
- m.block(1,0,2,2) << 4,5,6,7;
- m.col(2).tail(2) << 6,9;
3. 矩阵计算
基于赋值后的矩阵,我们希望通过Eigen实现对矩阵的计算。这里我们将矩阵计算分为三部分,包括矩阵基本计算,线性求解,特征值计算以及奇异值分解。
3.1 矩阵基本计算
矩阵基本计算比较简单,包括加,减,叉乘,点乘,转置,求逆等。
- MatrixXf m = MatrixXf::Random(3,3);
- MatrixXf m2 = MatrixXf::Random(3,3);
- m.row(i);//矩阵第i行
- m.col(j);//矩阵第j列
- m.transpose();//转置
- m.conjugate();//共轭
- m.adjoint(); //共轭转置
- m.minCoeff();//所有元素中最小元素
- m.maxCoeff();//所有元素中最大元素
- m.trace();//迹,对角元素的和
- m.sum(); //所有元素求和
- m.prod(); //所有元素求积
- m.mean(); //所有元素求平均
- m.dot(m2); //点乘
- m.cross(m2);//叉乘
3.2 线性求解
求解Ax=b,eigen提供了几个工具,包括:
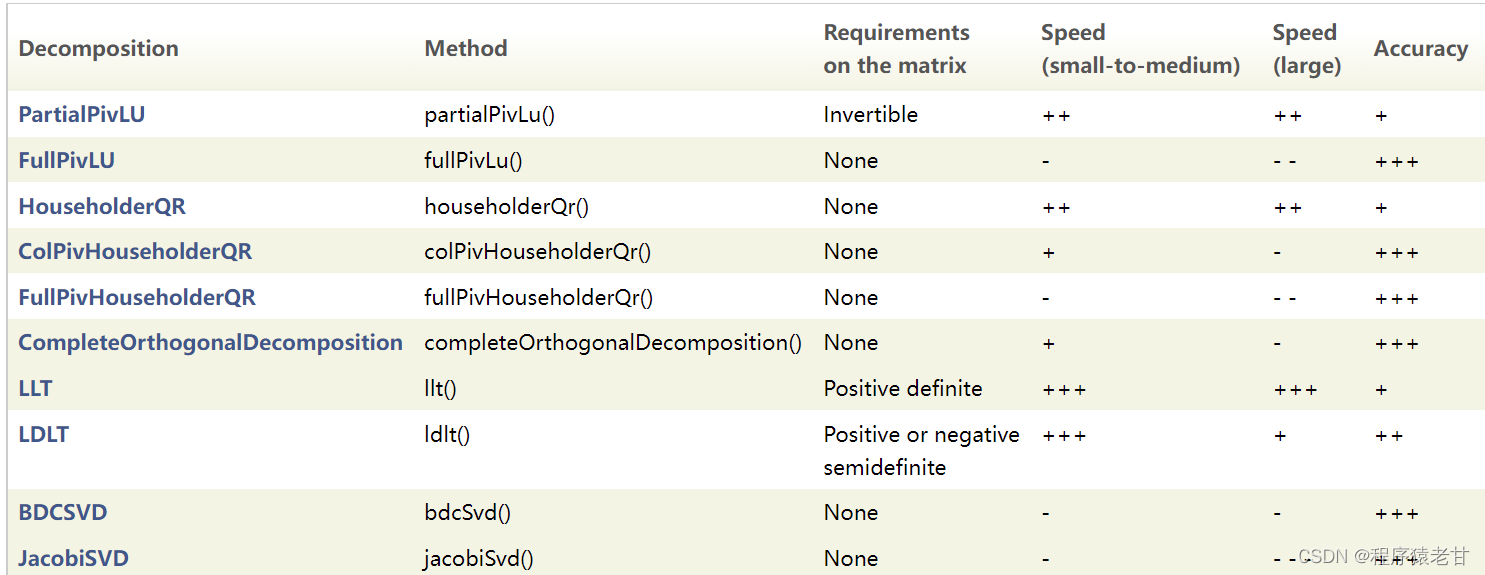
一般大家会选择LLT和LDLT
- Eigen::Matrix2f A, b;
- A << 2, -1, -1, 3;
- b << 1, 2, 3, 1;
- std::cout << "Here is the matrix A:\n" << A << std::endl;
- std::cout << "Here is the right hand side b:\n" << b << std::endl;
- Eigen::Matrix2f x = A.ldlt().solve(b);//or A.llt().solve(B);
- std::cout << "The solution is:\n" << x << std::endl;
3.3 特征值计算
特征值及对应的特征向量计算,在矩阵分析中占有重要位置。基于Eigen的特征值计算如下:
- Eigen::MatrixXd m = Eigen::MatrixXd::Random(3,3);
- Eigen::MatrixXd mTm = m.transpose() * m;//构成中心对其的协方差矩阵
-
- //计算
- Eigen::SelfAdjointEigenSolver<Eigen::MatrixXd> eigen_solver(mTm);
-
- //取出特征值和特征向量
- Eigen::VectorXd eigenvalues = eigen_solver.eigenvalues();
- Eigen::MatrixXd eigenvectors = eigen_solver.eigenvectors();
-
- Eigen::VectorXd v0 = eigenvectors.col(0);// 因为特征值一般按从小到大排列,所以col(0)就是最小特征值对应的特征向量
3.4 奇异值分解
参考博客:矩阵奇异值分解简介
奇异值分解(singular value decomposition, SVD):将矩阵分解为奇异向量(singular vector)和奇异值(singular value)。通过奇异值分解,我们会得到一些与特征分解相同类型的信息。然而,奇异值分解有更广泛的应用。每个实数矩阵都有一个奇异值分解,但不一定都有特征分解。例如,非方阵的矩阵没有特征分解,这是我们只能使用奇异值分解。
将矩阵A分解成三个矩阵的乘积:A=UDV^T。
这些矩阵中的每一个经定义后都拥有特殊的结构。矩阵U和V都被定义为正交矩阵,而矩阵D被定义为对角矩阵。注意,矩阵D不一定是方阵。对角矩阵D对角线上的元素被称为矩阵A的奇异值(singular value)。矩阵U的列向量被称为左奇异向量(left singular vector),矩阵V的列向量被称为右奇异向量(right singular vector)。A的左奇异向量是AA^T的特征向量。A的右奇异向量是A^TA的特征向量。A的非零奇异值是A^TA特征值的平方根,同时也是AA^T特征值的平方根。
- JacobiSVD<MatrixXd> svd(J, ComputeThinU | ComputeThinV);
- U = svd.matrixU();
- V = svd.matrixV();
- D_t = svd.singularValues();
总结
作为基于C++的矩阵运算库,Eigen部署简单,执行效率高,集成了功能丰富的矩阵运算函数。掌握Eigen,能够显著提高项目对矩阵优化问题的求解效率。

