
- 1数据工程师需要具备哪些技能?_数据服务工程师需要什么技能
- 2华为CE系列和S系列交换机堆叠配置及mad检测_mad detect mode direct
- 3第一次在大厂工作的感想——滴滴_滴滴mentor
- 4【Tensorflow】keras模型预测+keras模型转tflite模型(post-training模型量化)+tflite模型预测+对比量化模型和原始模型的推理速度和文件大小_experimental_new_quantizer
- 5Python scrapy使用入门,爬取拉勾网上万条职位信息(下)_item_con_list
- 6JAVA可变参数的使用(数据类型... 参数名称)
- 7c++指针最全总结(附源码和详细总结)
- 8基于Python二手物品交易系统(Django框架)答辩常规问题和如何回答(答辩指导)
- 9自学(网络安全)黑客——高效学习2024
- 10我的NPI项目之设备系统启动(八) -- Android14的GKI2.0开发步骤和注意事项
AI助力农作物自动采摘,基于YOLOv3全系列【yolov3tiny/yolov3/yolov3spp】参数模型开发构建作番茄采摘场景下番茄成熟度检测识别计数分析系统
赞
踩
去年十一那会无意间刷到一个视频展示的就是德国机械收割机非常高效自动化地24小时不间断地在超广阔的土地上采摘各种作物,专家设计出来了很多用于采摘不同农作物的大型机械,看着非常震撼,但是我们国内农业的发展还是相对比较滞后的,小的时候拔草是一个人一列蹲在地里就在那埋头拔草,不知道什么时候才能走到地的尽头,小块的分散的土地太多基本上都是只能人工手工来取收割,大点的连片的土地可以用收割机来收割,不过收割机基本都是用来收割小麦的,最近几年好像老家也能看到用于收割玉米的机器了不过相对还是比较少的,玉米的收割我们基本上还是人工来收割的,不仅累效率还低遇上对玉米叶片过敏的就更要命了。。。。闲话就扯到这里了。
有时候经常在想我们的农业机械化自动化什么时候能再向前迈进一大步,回顾德国的工业机械,在视频展示的效果中,其实很关键的主要是两部分,一部分是机器视觉定位检测识别,另一部分是机械臂传动轴,两部分相互配合才能完成采摘工作,前文实践如下:
《AI助力农作物自动采摘,基于YOLOv7【tiny/l/x】不同系列参数模型开发构建作物生产场景下番茄采摘检测计数分析系统》
《AI助力农作物自动采摘,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建作物生产场景下番茄采摘检测计数分析系统》
《AI助力农作物自动采摘,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建作物生产场景下番茄采摘检测计数分析系统》
《AI助力农作物自动采摘,基于YOLOv3全系列【yolov3tiny/yolov3/yolov3spp】参数模型开发构建作物生产场景下番茄采摘检测计数分析系统》
《AI助力农作物自动采摘,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建作物番茄采摘场景下番茄成熟度检测识别分析系统》
《AI助力农作物自动采摘,基于YOLOv7【tiny/l/x】不同系列参数模型开发构建作物番茄采摘场景下番茄成熟度检测识别分析系统》
《AI助力农作物自动采摘,基于DETR(DEtection TRansformer)开发构建作物生产场景下番茄采摘检测计数分析系统》
《AI助力农作物自动采摘,基于DETR(DEtection TRansformer)开发构建番茄采摘场景下番茄成熟度检测识别计数分析系统》
本文的主要想法是想要基于YOLOv3这一早期的经典模型来开发构建用于番茄采摘场景下的番茄作物成熟度检测识别系统,首先看下实例效果:
本文是选择的比较经典的也是比较古老的YOLOv3来进行模型的开发,YOLOv3(You Only Look Once v3)是一种目标检测算法模型,它是YOLO系列算法的第三个版本。该算法通过将目标检测任务转化为单个神经网络的回归问题,实现了实时目标检测的能力。
YOLOv3的主要优点如下:
实时性能:YOLOv3采用了一种单阶段的检测方法,将目标检测任务转化为一个端到端的回归问题,因此具有较快的检测速度。相比于传统的两阶段方法(如Faster R-CNN),YOLOv3能够在保持较高准确率的情况下实现实时检测。
多尺度特征融合:YOLOv3引入了多尺度特征融合的机制,通过在不同层级的特征图上进行检测,能够有效地检测不同尺度的目标。这使得YOLOv3在处理尺度变化较大的场景时表现出较好的性能。
全局上下文信息:YOLOv3在网络结构中引入了全局上下文信息,通过使用较大感受野的卷积核,能够更好地理解整张图像的语义信息,提高了模型对目标的识别能力。
简洁的网络结构:YOLOv3的网络结构相对简洁,只有75个卷积层和5个池化层,使得模型较易于训练和部署,并且具有较小的模型体积。
YOLOv3也存在一些缺点:
较低的小目标检测能力:由于YOLOv3采用了较大的感受野和下采样操作,对于小目标的检测能力相对较弱。当场景中存在大量小目标时,YOLOv3可能会出现漏检或误检的情况。
较高的定位误差:由于YOLOv3将目标检测任务转化为回归问题,较粗糙的特征图和较大的感受野可能导致较高的定位误差。这意味着YOLOv3在需要较高精度的目标定位时可能会受到一定的限制。
YOLOv3是YOLO系列里程碑性质的模型,随着不断地演变和发展,目前虽然已经在性能上难以与YOLOv5之类的模型对比但是不可否认其做出的突出贡献。
训练数据配置文件如下:
- # path
- train: ./dataset/images/train/
- val: ./dataset/images/test/
-
-
- # number of classes
- nc: 3
-
-
- # class names
- names: ['unripe', 'semiripe', 'fullyripe']
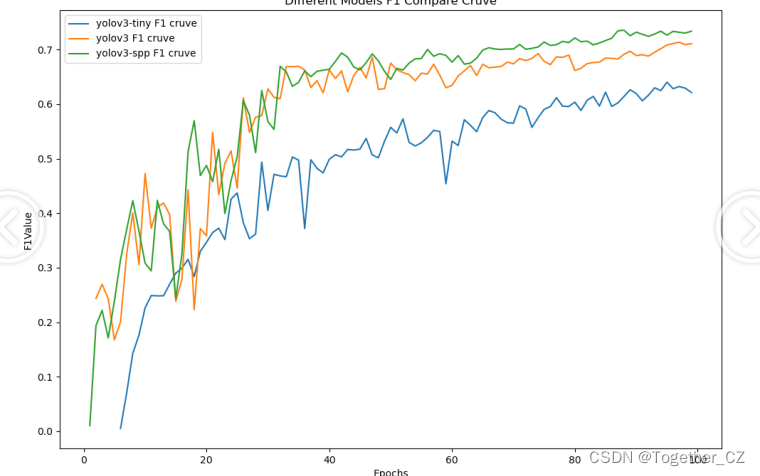
我们开发构建了yolov3全系列的参数模型,包含:yolov3-tiny、yolov3和yolov3-spp,实验阶段保持完全相同的参数设置,等待训练完成我们来整体对比可视化。
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能.F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
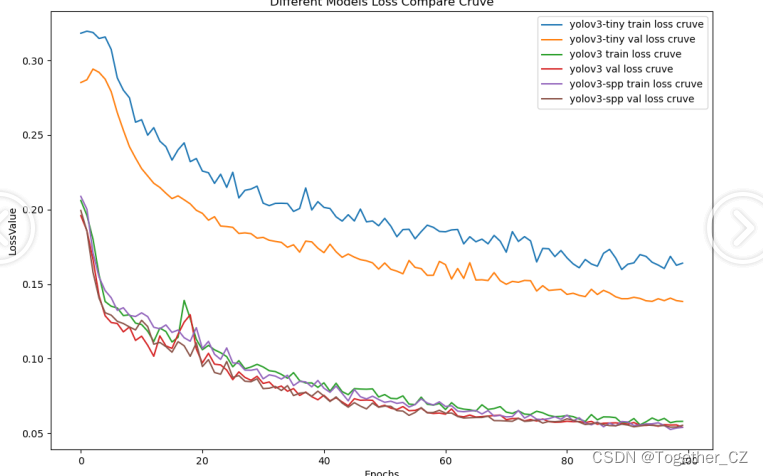
【loss曲线】
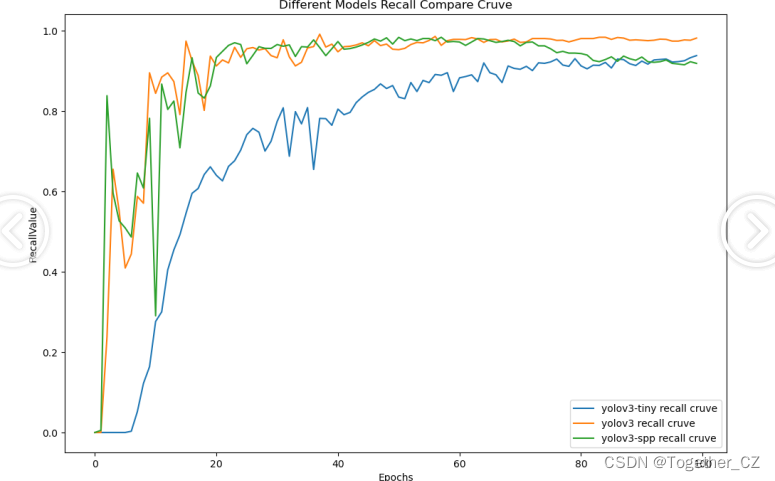
【Recall曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。
【Precision曲线】
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。

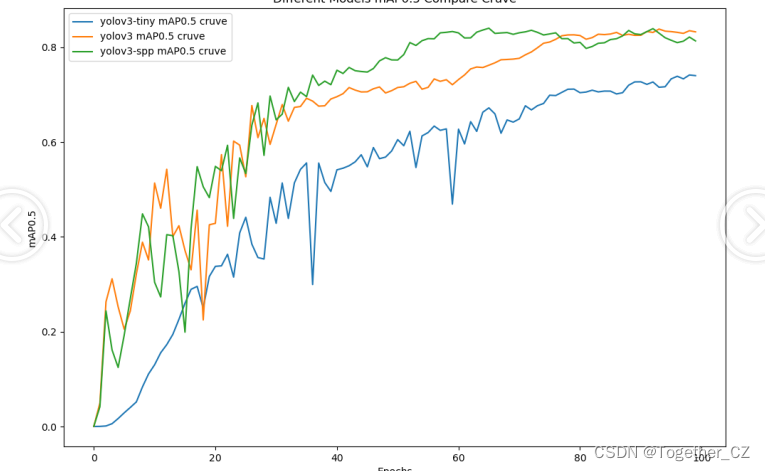
【mAP0.5】
mAP0.5(mean Average Precision at 0.5 IoU)
mAP0.5表示在IoU(交并比)阈值为0.5的情况下计算的平均精度(Average Precision,AP)。
IoU阈值决定了何时认为检测框与真实框匹配。较高的IoU阈值意味着更严格的匹配标准。
mAP0.5主要关注低阈值下的性能,即当IoU接近0.5时,模型在识别重叠框时的准确性。
【mAP0.5:0.95】
mAP0.5:0.95(mean Average Precision over IoU thresholds from 0.5 to 0.95):
mAP0.5:0.95表示在多个IoU阈值(从0.5到0.95)下计算的平均精度。
它涵盖了从低到高的IoU阈值,更全面地评估了模型在不同IoU阈值下的性能。
mAP0.5:0.95可以帮助我们了解模型在不同重叠程度下的检测能力。
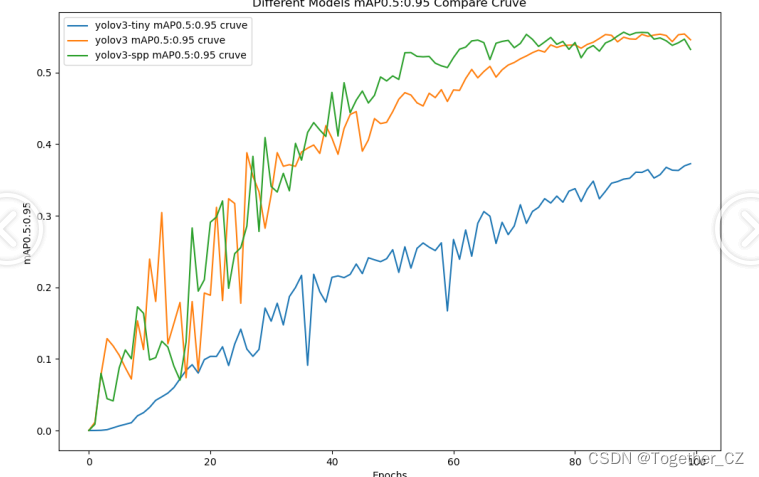
从实验结果综合对比来看不难看出:tiny系列的模型效果最差,被其他系列的模型拉开了明显的差距,yolov3狠人yolov3-spp两款模型达到了相近的性能,且参数量相近。我们考虑最终选择使用yolov3系列的模型来作为最终的推理模型。
离线推理实例如下所示:

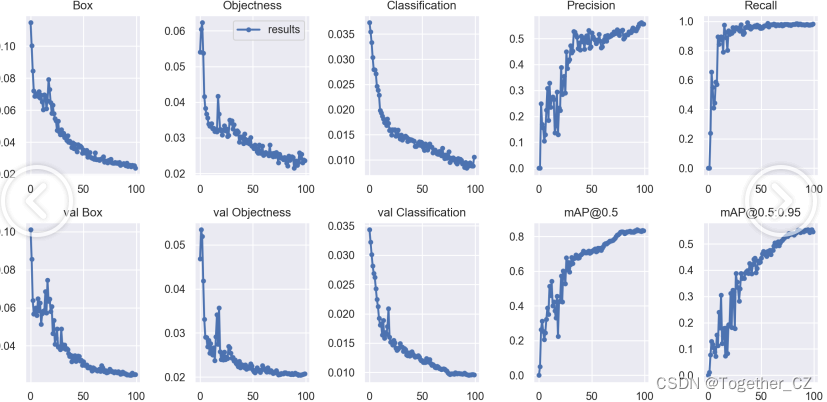
训练可视化如下所示:
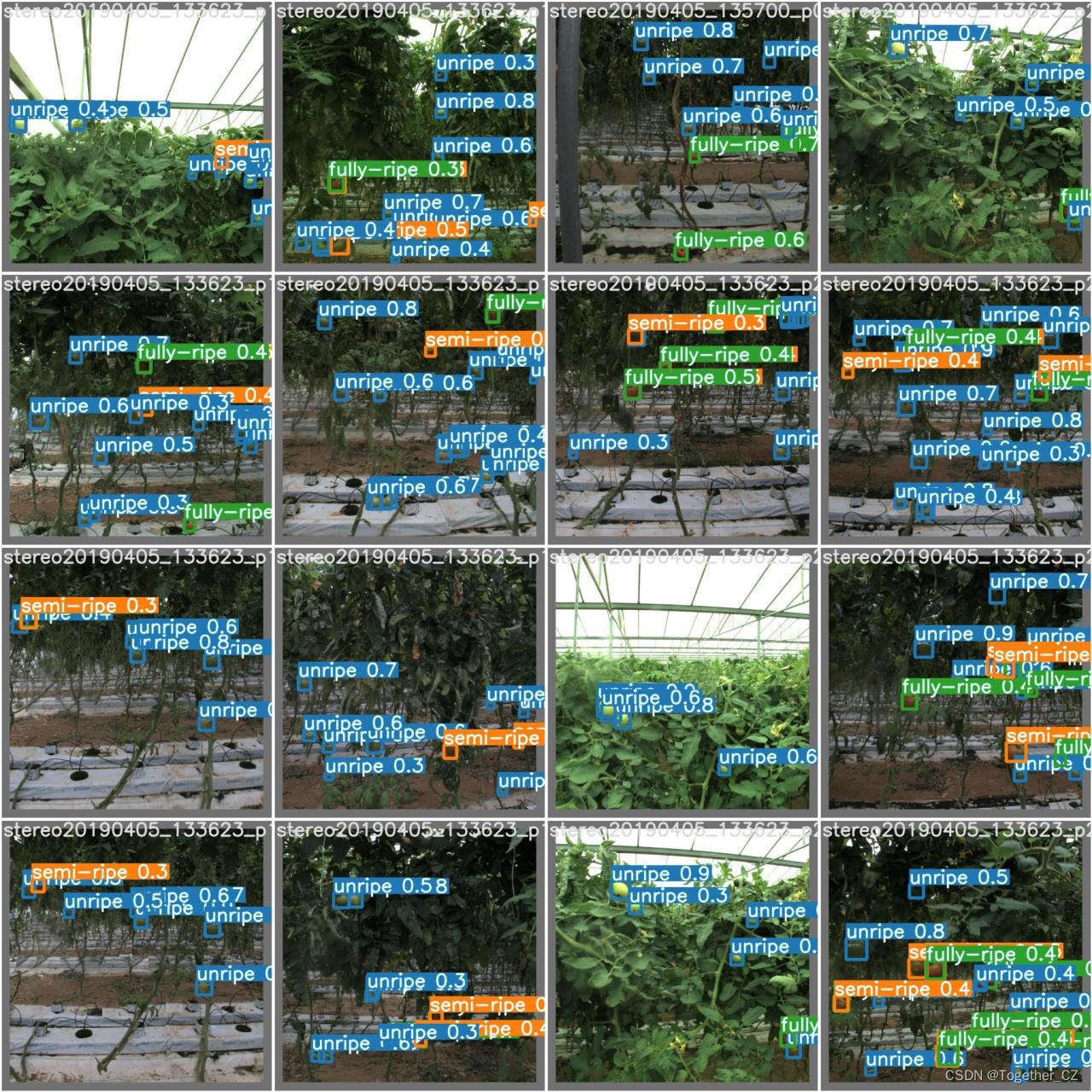
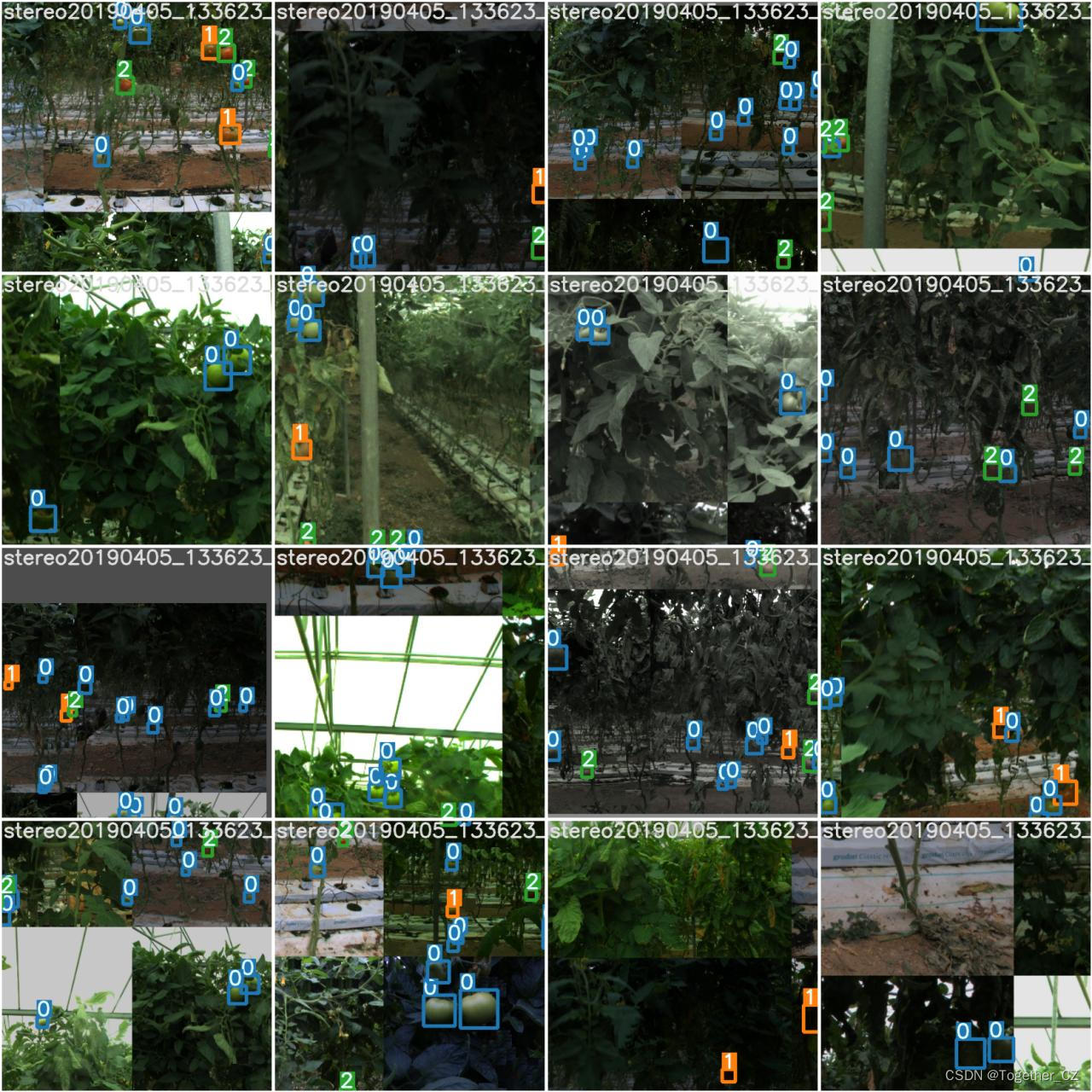
Batch实例如下:
感兴趣的话也都可以自行动手尝试下!
如果自己不具备开发训练的资源条件或者是没有时间自己去训练的话这里我提供出来对应的训练结果可供自行按需索取。

