
热门标签
热门文章
- 1Dictionary Learning详解(附带K-SVD算法)
- 2关注云栖大会的感受:从工业大脑到全面AI时代的进化_2023杭州云栖大会心得
- 3基于不同监督强度分类的语义分割综述:A Breif Survey on Semantic Segmentation with Deep Learning_a survey on semantic segmentation
- 4浅谈 开源许可证_代码开源许可证
- 5sqlite3数据库安装及使用笔记_new sqlite3.database
- 6纯python实现小程序云函数抓包(附完整代码)_个非寻wechathook
- 7麦肯锡 “金字塔原理”:职场人结构化思维、表达和解决问题的利器
- 8python中range()函数详解(含反序输出)_range(24)里面有多少个数
- 9【php】PHP数据库访问_php访问数据库
- 10.NET 4.0运行.NET 2.0兼容方法 (2)
当前位置: article > 正文
KINOdynamic-路径规划_kinodynamic中的kino
作者:很楠不爱3 | 2024-05-15 21:44:56
赞
踩
kinodynamic中的kino
工程自动导航分为两步:先路径规划,再轨迹规划

但是如果路径规划与轨迹规划完全独立开,不考虑运动学约束,会导致搜索出来的路线无法用轨迹优化矫正过来
例如:
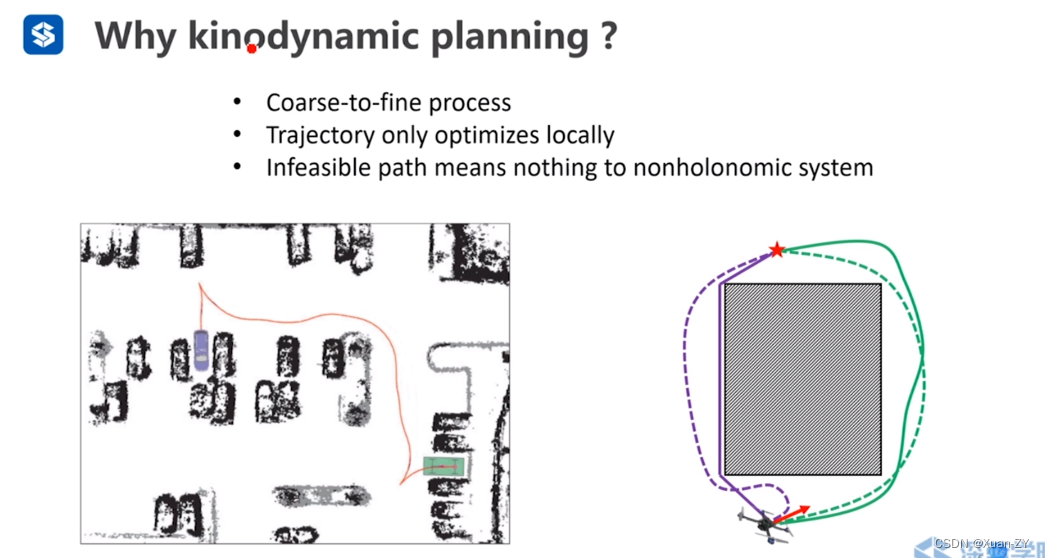
因此再路径规划的时候,就应该一定程度上将运动学约束考虑进来,这就是kinodynamix
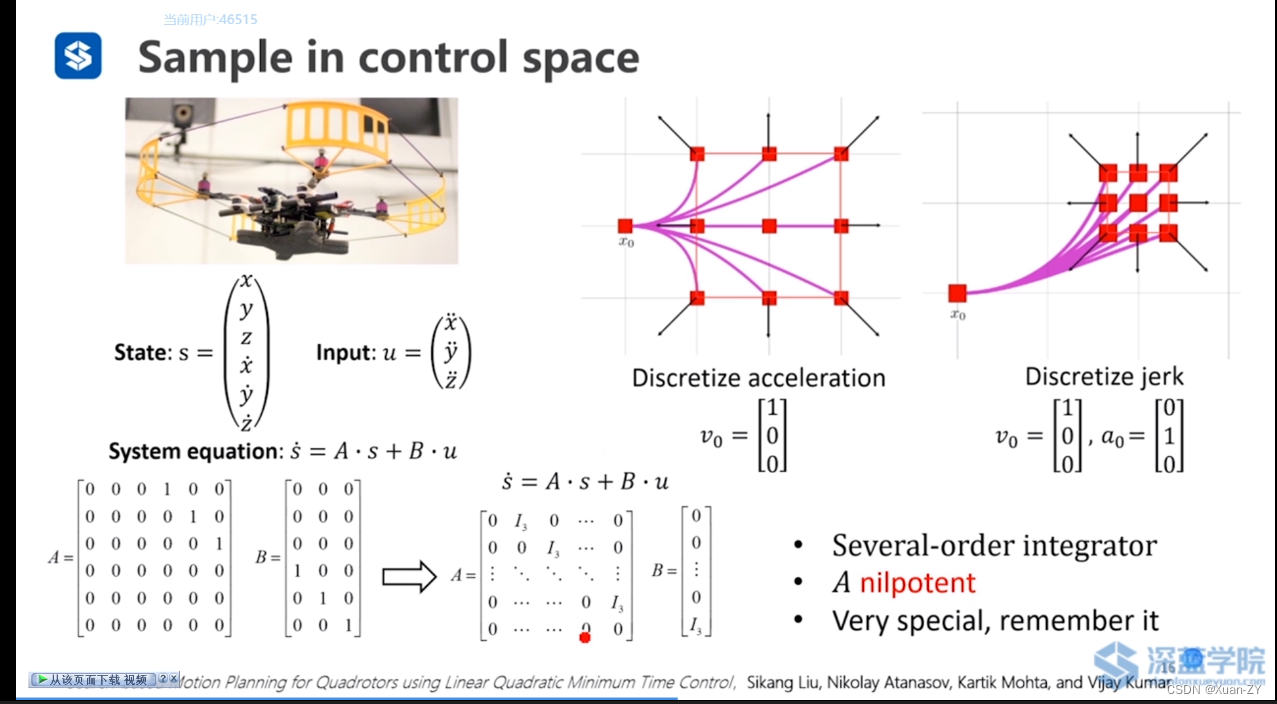
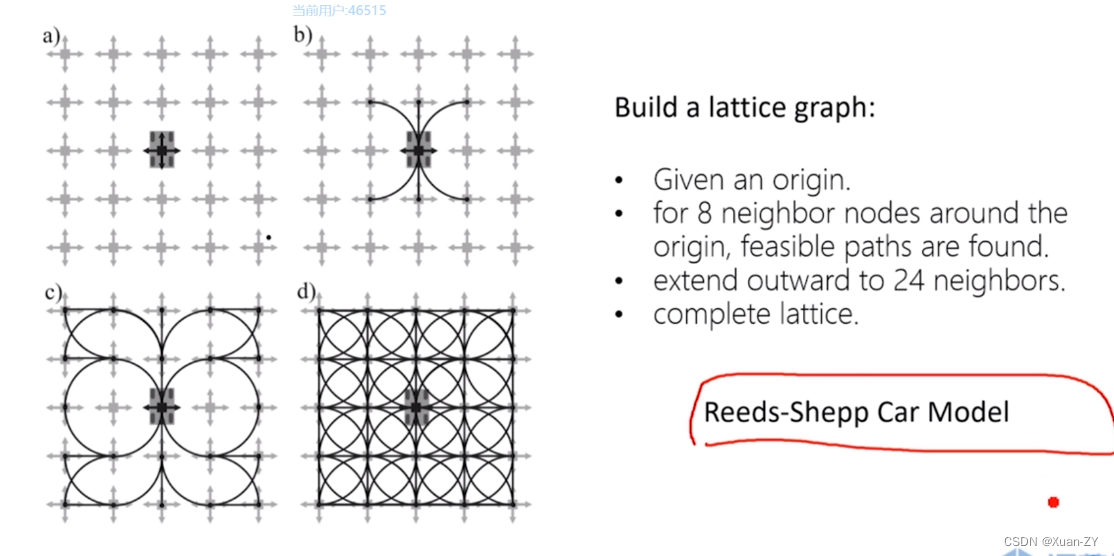
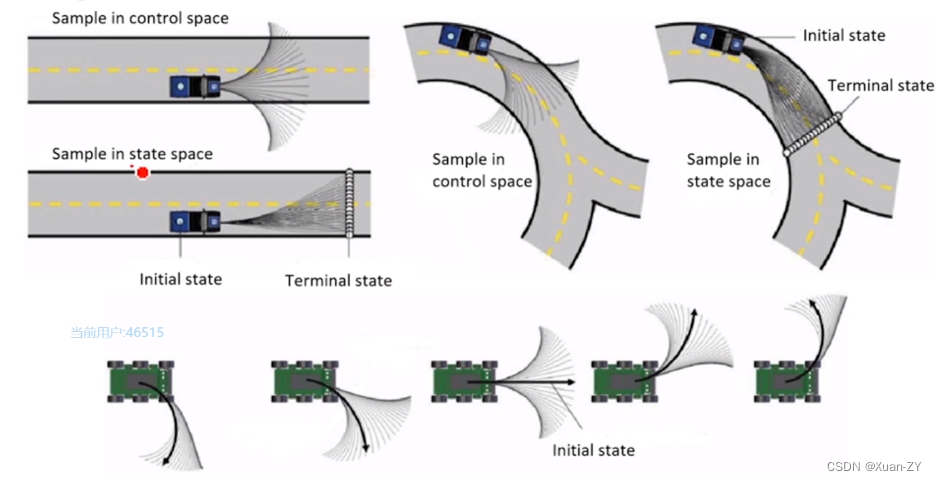
初始状态+控制输入
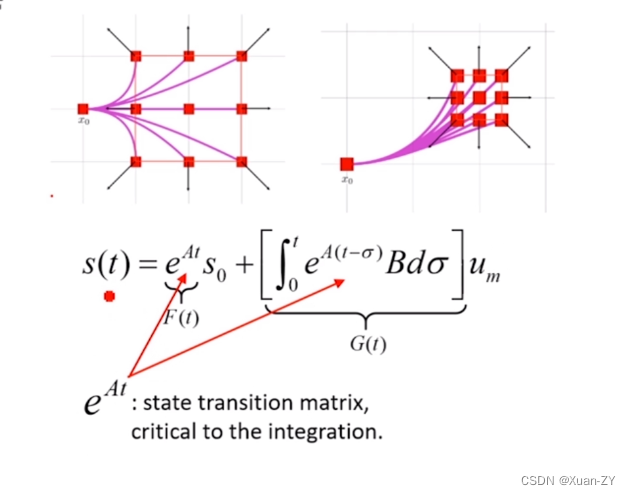
控制空间
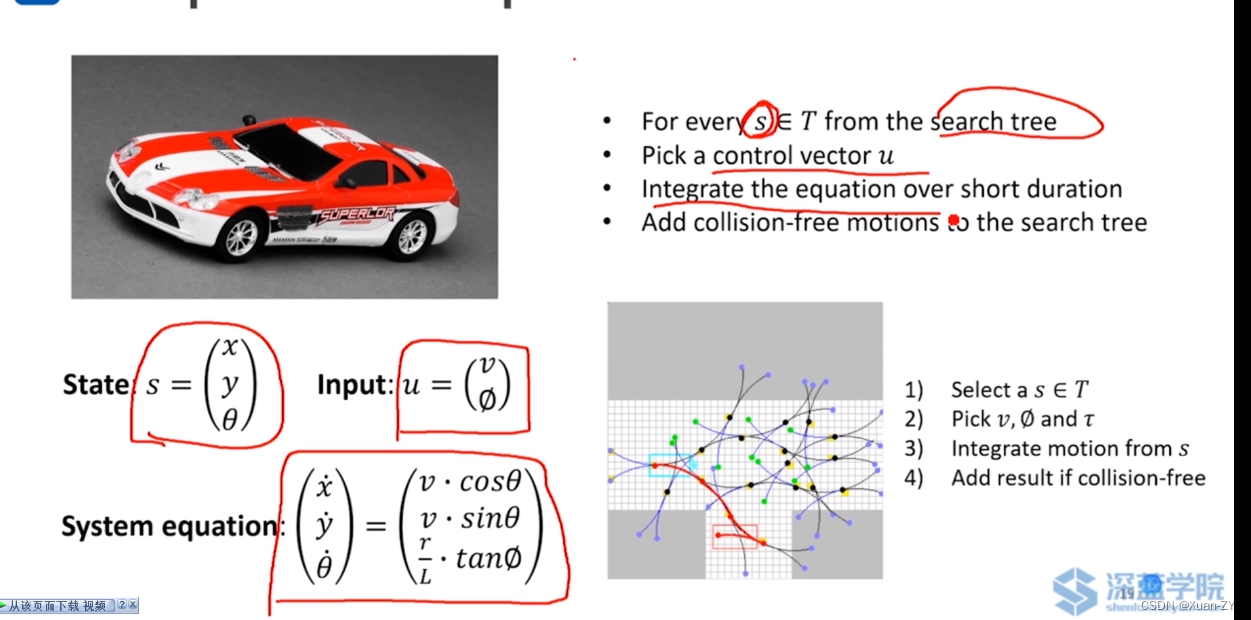
状态空间
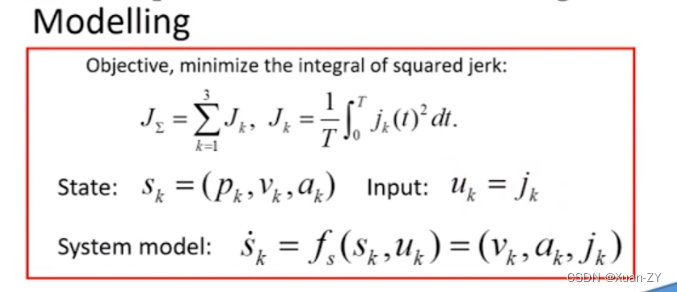
jek平方最小
kinodynamic rrt*
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/很楠不爱3/article/detail/575140
推荐阅读
相关标签

