
热门标签
热门文章
- 1Unity性能优化篇(七) UI优化注意事项以及使用Sprite Atlas打包精灵图集_unity ui优化 需要将missing reference改为none吗
- 251-33 LDM 潜在扩散模型论文精读 + DDPM 扩散模型代码实现_ldm模型
- 3LLamaFactory:当下最容易上手的大模型微调工具_llama factory
- 4YOLOv8初学者手册(Detect、Segment、Classify、OBB、Pose)_yolov8 rtdetr obb pose
- 52023年PMP考试重要时间节点来了!别说没提醒你!_pmp考试时间2023
- 6设置电子围栏 高德地图_Android 高德地图的使用, 根据手势拖动绘制电子围栏
- 7dlopen(cpython-39-darwin.so, 0x0002): symbol not found in flat namespace ‘_CFRelease‘_openexr.cpython-39-darwin.so ymbol not found in fl
- 8计算机音乐谱夜空中最亮的星歌词,夜空中最亮的星歌谱及歌词
- 9自适应相关滤波 with LSTM网络 for 目标追踪_lstm 目标跟踪
- 10git clone 一部分_git日常使用和常见的命令
当前位置: article > 正文
python 求解二次规划(quadprog)
作者:很楠不爱3 | 2024-05-19 14:07:55
赞
踩
quadprog
二次规划
在MATLAB中,quadprog是具有线性约束的二次目标函数的求解器。
quadprog 求由下式指定的问题的最小值
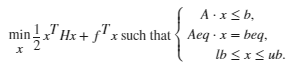
H、A 和 Aeq 是矩阵,f、b、beq、lb、ub 和 x 是向量。
其具体用法为:
x = quadprog(H,f)
x = quadprog(H,f,A,b)
x = quadprog(H,f,A,b,Aeq,beq)
x = quadprog(H,f,A,b,Aeq,beq,lb,ub)
x =quadprog(H,f,A,b,Aeq,beq,lb,ub,x0)
x =quadprog(H,f,A,b,Aeq,beq,lb,ub,x0,options)
x = quadprog(problem)
[x,fval] = quadprog()
[x,fval,exitflag,output] = quadprog()
[x,fval,exitflag,output,lambda] = quadprog(___)
当解决一个具有线性约束的二次规划问题时:
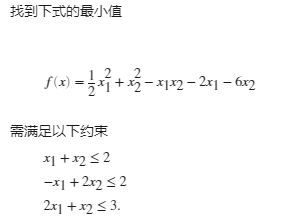
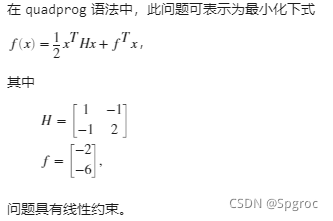
要求解此问题,首先输入系数矩阵。
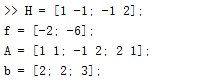

使用MATLAB语句为:
H = [1 -1; -1 2];
f = [-2; -6];
A = [1 1; -1 2; 2 1];
b = [2; 2; 3];
[x,fval,exitflag,output,lambda] = ...
quadprog(H,f,A,b);
x,fval %打印结果
- 1
- 2
- 3
- 4
- 5
- 6
- 7
当使用python进行二次型求解时,采用qpsolvers库中的solve_qp函数进行求解:
进行库文件的安装
pip install cvxopt==1.2.6 cvxpy==1.1.11 Cython==0.29.22 ecos==2.0.7.post1 numpy osqp==0.6.2.post0 qdldl==0.1.5.post0 qpsolvers==1.7.0 quadprog==0.1.8 scipy scs==2.1.4 -i https://pypi.tuna.tsinghua.edu.cn/simple
- 1
from numpy import array
from qpsolvers import solve_qp
H=array([[1.,-1.],[-1.,2.]])
f=array([[-2.],[-6.]]).reshape((2,))
L=array([[1.,1.],[-1.,2.],[2.,1.]])
k=array([[2.],[2.],[3.]]).reshape((3,))
x = solve_qp(H, f, L,k)
print("QP solution: x = {}".format(x))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
输出
QP solution: x = [0.66666667 1.33333333]
也可参考这位大佬的博客
(https://blog.csdn.net/u013421629/article/details/108358409)
import numpy as np import cvxopt def quadprog(H, f, L=None, k=None, Aeq=None, beq=None, lb=None, ub=None): """ Input: Numpy arrays, the format follows MATLAB quadprog function: https://www.mathworks.com/help/optim/ug/quadprog.html Output: Numpy array of the solution """ n_var = H.shape[1] P = cvxopt.matrix(H, tc='d') q = cvxopt.matrix(f, tc='d') if L is not None or k is not None: assert(k is not None and L is not None) if lb is not None: L = np.vstack([L, -np.eye(n_var)]) k = np.vstack([k, -lb]) if ub is not None: L = np.vstack([L, np.eye(n_var)]) k = np.vstack([k, ub]) L = cvxopt.matrix(L, tc='d') k = cvxopt.matrix(k, tc='d') if Aeq is not None or beq is not None: assert(Aeq is not None and beq is not None) Aeq = cvxopt.matrix(Aeq, tc='d') beq = cvxopt.matrix(beq, tc='d') sol = cvxopt.solvers.qp(P, q, L, k, Aeq, beq) return np.array(sol['x']) if __name__ == '__main__': H=np.array([[1,-1],[-1,2]]) print(H) f=np.array([[-2],[-6]]) print(f) L=np.array([[1,1],[-1,2],[2,1]]) print(L) k=np.array([[2],[2],[3]]) print(k) res=quadprog(H, f, L,k) print(res)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/很楠不爱3/article/detail/593223
推荐阅读
相关标签

