
- 1使用postman进行数据传输_postman event-stream数据接收
- 2No8.【spring-cloud-alibaba】基于OAuth2,新增加手机号验证码登录模式(不包含发短信,还没找到合适的短信发送平台)_oauth2.0手机号登录功能
- 3golang的map是不是并发安全的?怎么保证安全?
- 4力扣面试经典150 —— 1-5题
- 5基于微信小程序网上外卖订餐点餐系统设计与实现 毕业设计论文大纲提纲参考
- 6每天一个数据分析题(一百六十六)
- 7为什么LLM都用的Decoder only结构?_decoder-only的参数量只有encoder-decoder一半时,两者在预训练时的算力消耗相
- 8linux麒麟系统二级等保【三权分立策略】_银河麒麟操作系统怎么创建三权用户
- 9UE5 Python执行swarm lightmass构建_ue5添加lightmas
- 10ChatGPT调教指南 | 咒语指南 | Prompts提示词教程(二)
英文论文(sci)解读复现【NO.21】一种基于空间坐标的轻量级目标检测器无人机航空图像的自注意
赞
踩
此前出了目标检测算法改进专栏,但是对于应用于什么场景,需要什么改进方法对应与自己的应用场景有效果,并且多少改进点能发什么水平的文章,为解决大家的困惑,此系列文章旨在给大家解读发表高水平学术期刊中的 SCI论文,并对相应的SCI期刊进行介绍,帮助大家解答疑惑,助力科研论文投稿。解读的系列文章,本人会进行 创新点代码复现,有需要的朋友可关注私信我获取。

一、摘要
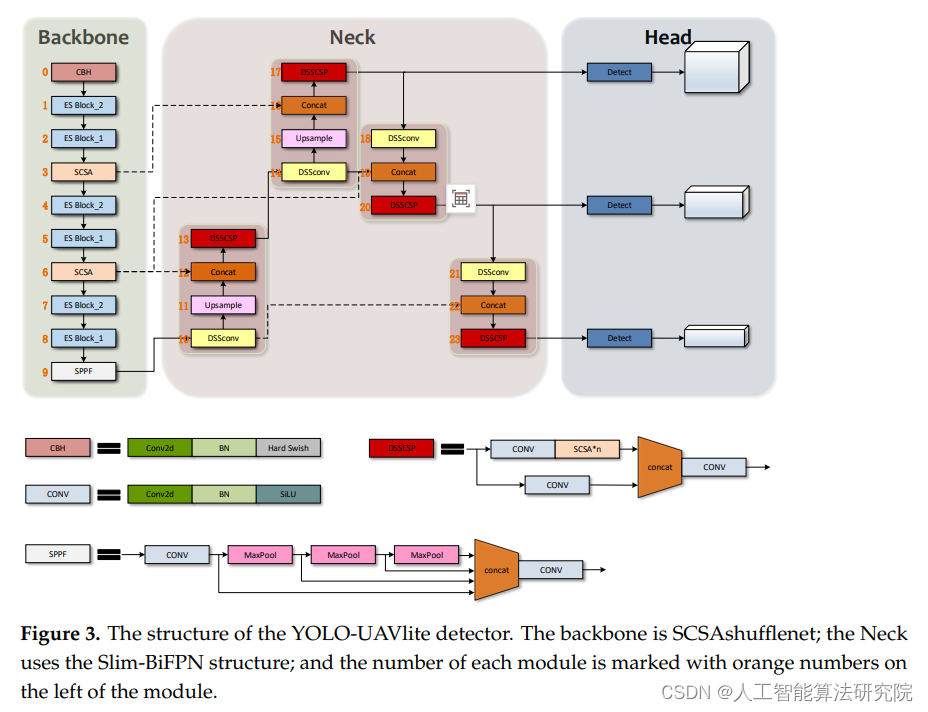
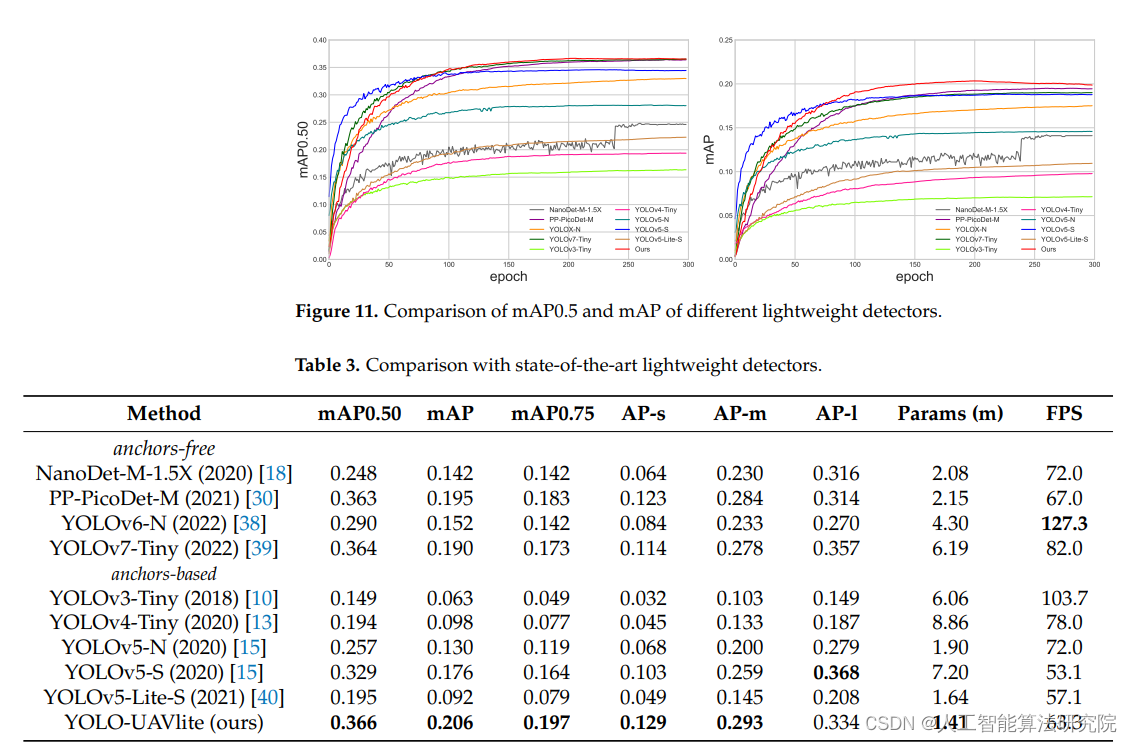
目标检测是众多无人驾驶最广泛的应用之一飞行器(UAV)任务。由于无人机的拍摄角度和飞行高度,与一般情况下,小物体在航空图像中占很大比例,而普通物体探测器在航空图像中不是非常有效。此外,由于的计算资源无人机平台通常是有限的,普通探测器的部署有大量无人机平台上的参数很难确定。本文提出了一种轻量级的对象检测器YOLOUAVlite用于航空图像。首先,空间注意力模块和坐标注意力模块是修改并组合形成一个新的空间坐标自注意(SCSA)模块,该模块集成空间、位置和通道信息以增强对象表示。关于这个在此基础上,我们构建了一个名为CSAshuffleenet的轻量级主干,它结合了增强型Shuf fle eNet(ES)网络,具有拟议的SCSA模式。关于这个在此基础上,我们构建了一个名为SCSAshuf fleenet的轻量级主干,它结合了增强型Shuf fle eNet(ES)网络,具有拟议的SCSA模块,以改进特征提取并减少模型大小。其次,我们提出了一种改进的特征金字塔模型,即Slim-BiFPN,其中我们构造了新的轻量级卷积块,以减少特征过程中的信息损失地图融合过程,同时减少模型权重。最后,定位损失函数为改进以提高边界框回归率,同时提高定位精度。在VisDrone-DET2021数据集上进行的大量实验表明,与YOLOv5-N基线,所提出的YOLO UAVlite将参数数量减少了25.8%,并且在mAP0.50中实现了10.9%的增益。与其他轻质探测器相比,mAP和改进了参数的数量。
二、网络模型及核心创新点
三、实验效果(部分展示)
五、实验结论
在这项研究中,提出了一种轻型探测器YOLO UAVlite来应对这一挑战航空图像中的小规模物体检测。网络结构基于在YOLOv5-N算法上,提高了对小物体的检测效果。我们修改空间和坐标的注意力,并结合它们的优势产生新的注意力,称为SCSA,它将空间、位置和通道信息集成到增强对象表示。我们提出了一个基于SACA的骨干网络ES。改进后的主干网大大提高了检测性能,尤其是对
小物体。所提出的Slim BiFPN大大简化了网络,并且SCSA对模块进行了融合,减少了信息丢失,避免了精度损失。最后,我们扩展通过优化损耗来减少小物体的损耗作用。
注:论文原文出自A Lightweight Object Detector Based on Spatial-Coordinate Self-Attention for UAV Aerial Images 本文仅用于学术分享,如有侵权,请联系后台作删文处理。
解读的系列文章,本人已进行创新点代码复现,有需要的朋友欢迎关注私信我获取❤ 。

