
- 1Android系统启动流程(七)——SystemServer进程(基于Android13)_android system server
- 2Harmony装饰器_鸿蒙 装饰器
- 3微信小程序scroll-view组件之上拉加载下拉刷新(解决上拉加载不触发)_scroll-view 下拉刷新
- 4MySQL数据库中字段值含逗号的数据,分隔成多条查询
- 5pgsql:锁定表,禁止增删改操作_pgsql 锁表
- 6基于联邦学习的MNIST手写数字识别-Pytorch实现_data_set = torchvision.datasets.mnist("", is_train
- 7C# DateTime类型的变量默认值_c# datetime默认值
- 8iOS常用宏定义总结_ios 宏判断
- 9事件声明与赋值_delphi 普通方法给事件赋值
- 10Gradle & Maven 阿里云镜像_gradle 阿里云镜像
多智能体系统集群协同控制实验平台详解与典型案例_群集智能协同控制
赞
踩
目录
为了应对实际环境中复杂的场景,多个智能体协作研究成为了必经之路。但当系统规模较大时,集中制方法不足以满足要求。基于自组织系统控制的多智能体集群研究具备完成复杂任务的能力。
进行智能体集群研究时,通过不同设计方法建立的机器人系统能否实现预期的行为是衡量该系统性能的依据,主要通过三种方法进行验证:动力学模型、计算机仿真及机器人实验。
动力学模型通过随机过程及动力学方法等理论工具对系统收敛性进行验证,相较于其他方法的抽象层次更高,但是需要预设很多前提,但是在实际智能体集群过程中存在噪声等随机条件,无法实现相对统一的模型。
计算机仿真利用计算机对环境与智能体、智能体个体间的相互作用进行模拟,验证系统的性能并进行优化。该方法可以完成大规模的机器人系统验证,提高系统验证效率,但是真实环境中的通信噪声、地面摩擦、智能体间的碰撞都可能对个体产生影响,进而影响群体行为,仿真并不能完全复现真实场景。
大部分机器人实验在实验室的可控环境下进行,光照强度、地面摩擦系数等条件可由研究人员定量控制,而且实验中的环境噪声、智能体间的碰撞及通信干扰等实际存在,因此机器人实验是验证机器人系统可行性及鲁棒性的必要手段。

二、动作捕捉系统解决智能体集群实验系统多个痛点
智能体集群实验系统实现,需要满足在室内同时定位多个智能体,且由于室内空间小,要求定位精度高。
由于室内信号弱,利用GPS无法实现室内定位。目前的室内定位方案包括激光SLAM、视觉SLAM、光流及UWB等。上述所有定位方式需要优先被解决的问题在于定位精度低(其中定位精度最高的UWB为厘米级),此外还存在如视觉定位方式占用过多计算资源,UWB功率需要低于一定门限(以避免干扰其他通讯设备)等,对于空间不开阔、智能体密度高的室内实验环境有较大局限性。
利用动作捕捉系统作为多智能体室内定位方案有效解决上述问题。
NOKOV度量动作捕捉系统作为一种外部设备,利用布置在场地四周的光学动作捕捉镜头拍摄固定在各智能体上的反光标志点,通过计算出标志点的三维空间坐标,确定智能体的位置(利用同一智能体上多点还可以获取姿态信息),定位精度可以达到亚毫米级。由于动作捕捉系统自身计算出位置信息,并不占用智能体的计算资源。且动捕系统为外置设备,可以减轻无人机负载。NOKOV度量动作捕捉系统可以同时定位40个以上的智能体,且采样频率高达380Hz、延迟约为4ms,满足无人机等快速响应的需求。
三、多智能体集群协同控制实验平台
下面介绍几种基于光学动作捕捉的多智能体集群实验平台。
1.Crazyswarm多无人机集群编队实验平台
Crazyswarm多无人机集群编队实验平台是基于ROS开发的可快速实验多种无人机单机飞行任务和无人机集群控制算法开发验证的实验平台(使用Crazyflie无人机)。平台针对无人机集群研究人员以下痛点进行开发:室内多台无人机、单体体积小、定位精度高、软件开源等。此平台提供了整套无人集群控制开发、调试及飞行验证软硬件环境,用户无需具备太多的底层编程技术即可完成算法的优化和验证,适用于教学和二次开发。
| 设备名称 | 型号 |
| NOKOV度量动作捕捉系统 | Mars系列 |
| Crazyflie无人机若干 | Crazyflie2.1 |
| 无线收发模块 | Crazyradio PA |
| 电脑主机 | Windows系统,虚拟机运行ubuntu系统 |
Crazyswarm提出的是目前最大规模的室内无人机集群系统架构。系统利用机载处理器计算,增加通信鲁棒性,且需要更少的通信带宽。
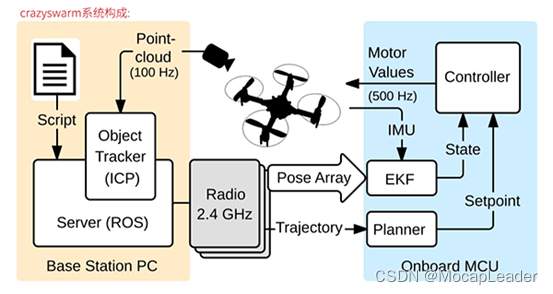
由于动作捕捉系统利用无人机上标志点的不同排布识别各单体,当进行大规模无人机集群时,无人机上没有足够空间设计出完全不同的标志点排布方式。为了解决以上问题,Crazyswarm提出利用运动捕捉系统中的原始点云的方法定位无人机,此方法需要满足两个条件:
(1)必须知道各无人机的初始位置,才能在ID和物理位置之间建立映射。
(2)跟踪必须是逐帧完成的,如果标记在长时间内被遮挡,该算法可能无法重新建立ID-位置映射。

利用Crazyswarm进行实验的研究方向包括姿态估计、轨迹规划、编队控制、机器学习、分布式优化、编队表演等。电子科技大学基于Crazyswarm平台,搭载12个NOKOV度量光学动作捕捉镜头,进行无人机编队研究。
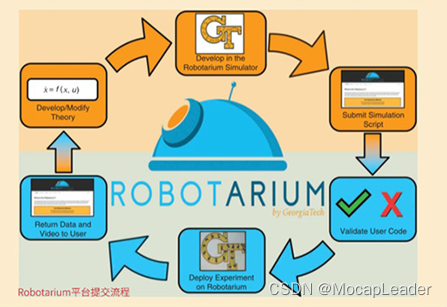
2.Robotarium机器人平台

Robotarium提供了一个可以远程访问的集群机器人研究平台,研究人员可以将其算法上传并在真实的机器人上验证,而不是单纯的仿真模拟。Robotarium平台可以同时运行数十至数百个机器人,自从平台开放以来,已完成了1000多次实验。
Robotarium平台中,八个运动捕捉镜头安装在测试平台的外围上方,用来跟踪每个机器人的运动,并进行数据采集和控制。 每个机器人上固定独特排布方式的反光标记点,用来区分个体。由于动作捕捉系统捕捉范围更大,定位精度可以达到亚毫米级而且采样频率高,Robotarium平台选用动捕系统代替了视觉相机跟踪系统。从硬件安全的角度考虑,动作捕捉系统的速度、准确性(accuracy)和精密度(precision)使Robotarium平台能够在执行未知实验期间检测出潜在的危险情况,并进行自动纠正。
利用Robotarium平台实验的进行研究方向包括编队控制、路径规划、生物启发的集群控制、避碰等。
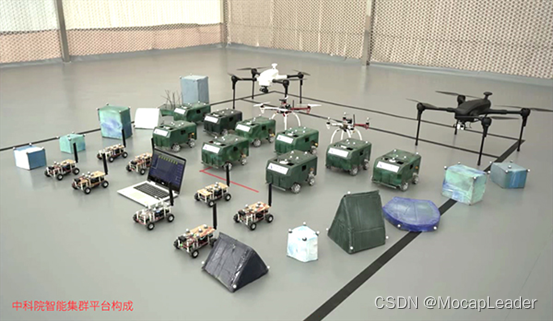
3.中科院自动化所智能集群平台
智能无人集群系统是中科院自动化所飞行器智能技术团队及中科院自动化所泰州智能制造研究院团队联合研发的针对单体智能和群体智能的一套演示验证系统。该无人集群系统可实现单体无人车和无人机控制、地空协同、集群对战以及无人车、无人机编队表演等功能,同时具有高度开放的 SDK,能够实时将无人车、无人机的位置、速度等状态回传给指挥系统,可用于青少年科普、教育培训、高校或科研院所的深度二次开发、以及区域物流、军民融合等行业应用领域。另外,团队拥有室内高精度NOKOV度量动作捕捉系统,可在密集区域内实时对上百个目标进行捕捉跟踪。
无人集群系统依靠感知与通信系统获取外界环境信息和其他平台的协助信息,感知系统中拥有较多的感知模块,包括 IMU 模块、遥控接收模块、无线通信模块等,这些模块接口具有普适性,能够根据不同的任务要求和性能,做出相应的替换和迁移。
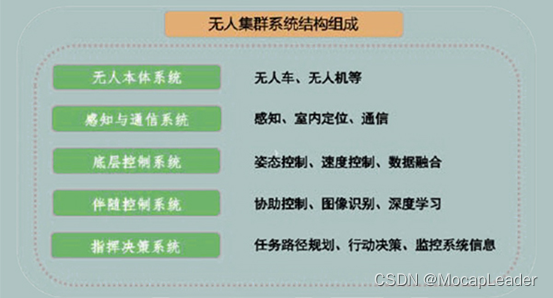
对于精度要求高的情况,平台部署了NOKOV度量光学三维动作捕捉系统,以提供精确的位姿信息。
更多阅读:
协同控制 空间定位 | NOKOV度量动作捕捉NOKOV度量动作捕捉用于多智能体的天地一体化网络协同控制![]() https://www.nokov.com/motion-capture-cooperative-control.html经典案例 | NOKOV度量动作捕捉经典案例
https://www.nokov.com/motion-capture-cooperative-control.html经典案例 | NOKOV度量动作捕捉经典案例![]() https://www.nokov.com/support/case_studies/5.html#case-list-1
https://www.nokov.com/support/case_studies/5.html#case-list-1

