
- 1MySQL Workbench导出数据库_mysql workbench 导出数据库
- 2Pandas 2.2 中文官方教程和指南(二十二)
- 3【FPGA入门】第八篇、FPGA驱动VGA实现动态图像移动_基于fpga调整vga显示屏的图像位置
- 4nvm安装及卸载,nrm安装及卸载_卸载nrm
- 5字节跳动笔试题总结_字节跳动在线笔试
- 6VC2008 ATL控件 去掉运行库依赖(转载)_
dynamic - 7stm32f4内部flash讲解_stm32f4 flash
- 8详解PostgreSQL聚合函数: 精准统计数据,提升效率 附代码示例_pgsql 聚合函数
- 9一文揭秘23届字节、阿里、百度等校招技术岗薪资_字节校招薪资2023
- 10【动态规划】【位运算】1787. 使所有区间的异或结果为零
性能升级,INDEMIND机器人AI Kit助力产业再蜕变
赞
踩
随着机器人进入到越来越多的生产生活场景中,作业任务和环境变得更加复杂,机器人需要更精准、更稳定、更智能、更灵敏的自主导航能力。
自主导航技术作为机器人技术的核心,虽然经过了多年发展,取得了长足进步,但在实践过程中,依然面临较多难题,如面对特殊障碍物难以避障、复杂场景精度降低稳定性下降、智能交互支持不足等问题,且地图构建大多仍为传统的2D栅格地图、拓扑地图,缺乏机器人用于理解环境、人机交互等业务的高层次语义信息。然而迭代升级导航技术,却又存在算法研发难度高、软硬件一体化设计难度大、开发周期长等现实问题,导致开发进程并不顺利。
作为行业领先的AI技术供应商,INDEMIND已经深耕行业多年,基于在机器人的导航、避障、决策、AI交互等关键技术和产品开发方面的深层次积累,推出了面向10—100kg量级的商用机器人自主导航方案「商用机器人AI Kit」,基于高度自研的以视觉为核心的多传感器融合导航架构及算法,导航的精度、稳定性和灵敏性均有着显著提升,同时在环境适应能力、智能作业、人机交互等方面也有着优秀表现。

「商用机器人AI Kit」以自研的INDEMIND OS Fusion AGI系统为基础,采用以双目立体相机为核心的多传感器融合架构,可支持市面上不同品类的主流传感器,满足商用机器人导航定位、智能避障、路径规划、决策交互等核心功能的开发,能够广泛应用于商用清洁、酒店配送、送餐、巡检等商用服务机器人平台。在实际应用上,机器人在硬件选择和外形上可根据实际开发需求灵活适配,适用性大大提升。
多模态视觉多传感器融合架构,释放视觉潜力
和以多线激光雷达为主的融合方案不同,INDEMIND研发了一套以视觉为主的标准化、模块化的多传感器融合架构,通过遵循INDEMIND的标准定义接口,可快速加入IMU、里程计、单线激光雷达、GNSS等低成本传感器,实现“积木式”加装,基于INDEMIND对算法的多年迭代优化,无论面对普通环境,还是复杂动态环境,机器人均能实现高精度、高稳定性、低成本的3D环境感知。
同时,视觉传感器与激光雷达相比,成本更低,使用寿命更长,且不会出现机械故障问题,运行过程中,一旦激光传感器或别的传感器出现问题,机器人仍能保持正常工作。
另外,由于传感器较多,视觉、激光、里程计、IMU等不同传感器产生的噪点,对于系统的稳定性和精度影响较大,INDEMIND对于各个传感器的数据,进行了野值判定及剔除,进一步增进系统对于原始传感器数据的容错能力,提升鲁棒性,保障最终的稳定性和精度。
为了优化视觉带来的算力问题,INDEMIND在算法上采用增量优化的方式,分段处理,并在区段间建立先验信息,有效降低了平台计算压力,提高计算效率。且在硬件上,对视觉处理采用neon加速、GPU加速、DSP加速等方式,提升计算性能,降低算力要求。这使得「商用机器人AI Kit」能够适配更多较低算力平台,开发出更高性价比的产品。
性能升级,让机器人更高效
• 自主实时3D建图,无需部署
基于独有的VSLAM融合算法,机器人支持实时构建全场景二维地图、三维地图及语义地图,且精度可达厘米级。同时还支持地图动态更新及智能禁区等。
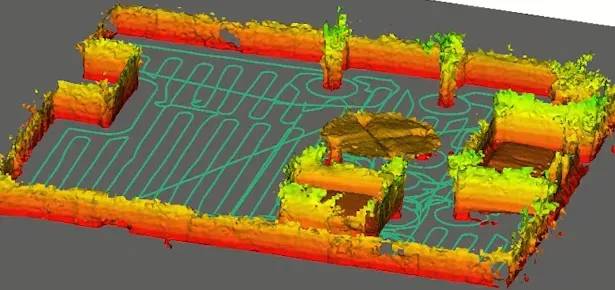
部分场景3D建图演示
目前大多数机器人无法自主建图,需要现场部署工程师进行部署建图后才能使用,而搭载「商用机器人AI Kit」的机器人借助它强大的自主实时建图能力,不再需要技术人员的参与,无需部署,开机即可使用,同时不再担心场景内部结构发生变化,机器人还能够自主更新地图,大大提升机器人的使用体验。

• 多场景适配,拓展应用边界
INDEMIND拥有超过100个使用场景的海量数据,对于清洁、配送、导览、安防等多种工作场景有着深度理解,配合领先的自主导航,机器人具备跨场景适应能力,让机器人兼顾垂直和通用表现。
• 更智能,像“人”一样作业
为了模仿人脑的决策,INDEMIND基于设备端、云端智能决策平台、大数据平台三端专门建立的一套智能决策引擎,能够基于关键数据不断更新算法模型,持续提升场景处理和问题应对能力,为智能避障、主动安全、智能作业、智能交互、智能梯控智能化功能提供底层支持。
借助智能决策引擎,在避障上,机器人可做出类人规避动作的精细化操作,能够让机器人有策略的实现智能避障(如根据障碍物不同做出不同规避距离);在作业上,如清洁机器人根据不同场景特性,选择不同的清洁策略。
快速完成0-1,让产品开发更简单
「商用机器人AI Kit」作为通用化平台,搭建了适应机器人业务的硬件虚拟化、程序管理和服务平台,兼容市场主流机器人平台,同时方便应用层开发及部署,并最大化利用嵌入式计算平台各个计算资源,确保系统程序运行的实时性及功能、性能指标。
在开发支持上,提供便捷的标准库,减少开发量,大量节省研发成本,提高研发速度,同时还具备动态的模块加载机制,分布式编译,大量节省编译时间,进一步提高研发人员和测试人员调试效率。此外,完善的性能自监测系统,能够快速进行性能验证与性能优化。
目前,基于「商用机器人AI Kit」的方案优势,导航模块成本最低可以下探到2千元以内,包含导航和电池的完整底盘成本则可以下探到5千元以内,相较激光雷达融合方案成本下降60-80%。同时,结合INDEMIND提供成熟的硬件参考设计和量产设计服务及相对成熟的作业单元技术,整机从立项到量产最快可以控制到2个月以内,大大降低企业的研发周期和投入成本。

