
热门标签
热门文章
- 1区块链知识总结——以太坊的挖矿难度调整
- 2Linux安装Docker安装开源固定资产管理工具snipe-it(QQ邮箱Docker配置成功)_snipe-it docker
- 3webman 事务回滚失效问题记录
- 4mac版-Jdk安装与环境配置_mac jdkman
- 5如何删除有外键关系的两张表的数据_有外键的表如何删除数据
- 6Metasploit(一)--Meterpreter的命令速查表
- 7笔记本选购指南
- 8Hive(二) Hive SQL_hivesql default
- 9【华为OD】C卷真题:100分:小朋友来自多少小区 Java代码实现【思路+代码】_小朋友来自多少小区【华为od机试java&python&c++&js题解】
- 10python入门——python基础语法_头歌python入门之基础语法答案
当前位置: article > 正文
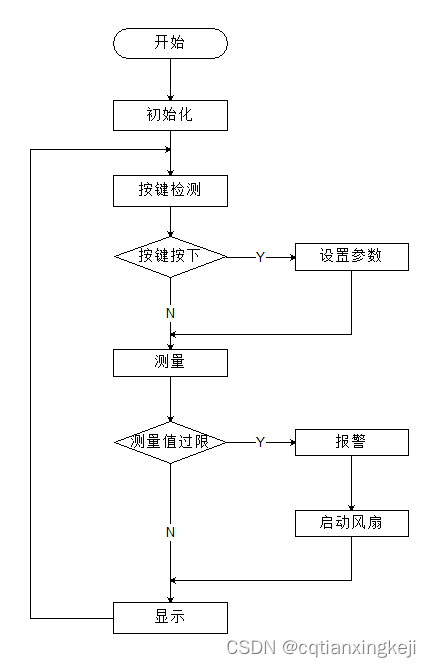
基于51单片机的5路舵机控制系统(5路)原理图、流程图、物料清单、仿真图、源代码_51单片机驱动舵机驱动电路图
作者:我家小花儿 | 2024-04-20 09:15:47
赞
踩
51单片机驱动舵机驱动电路图
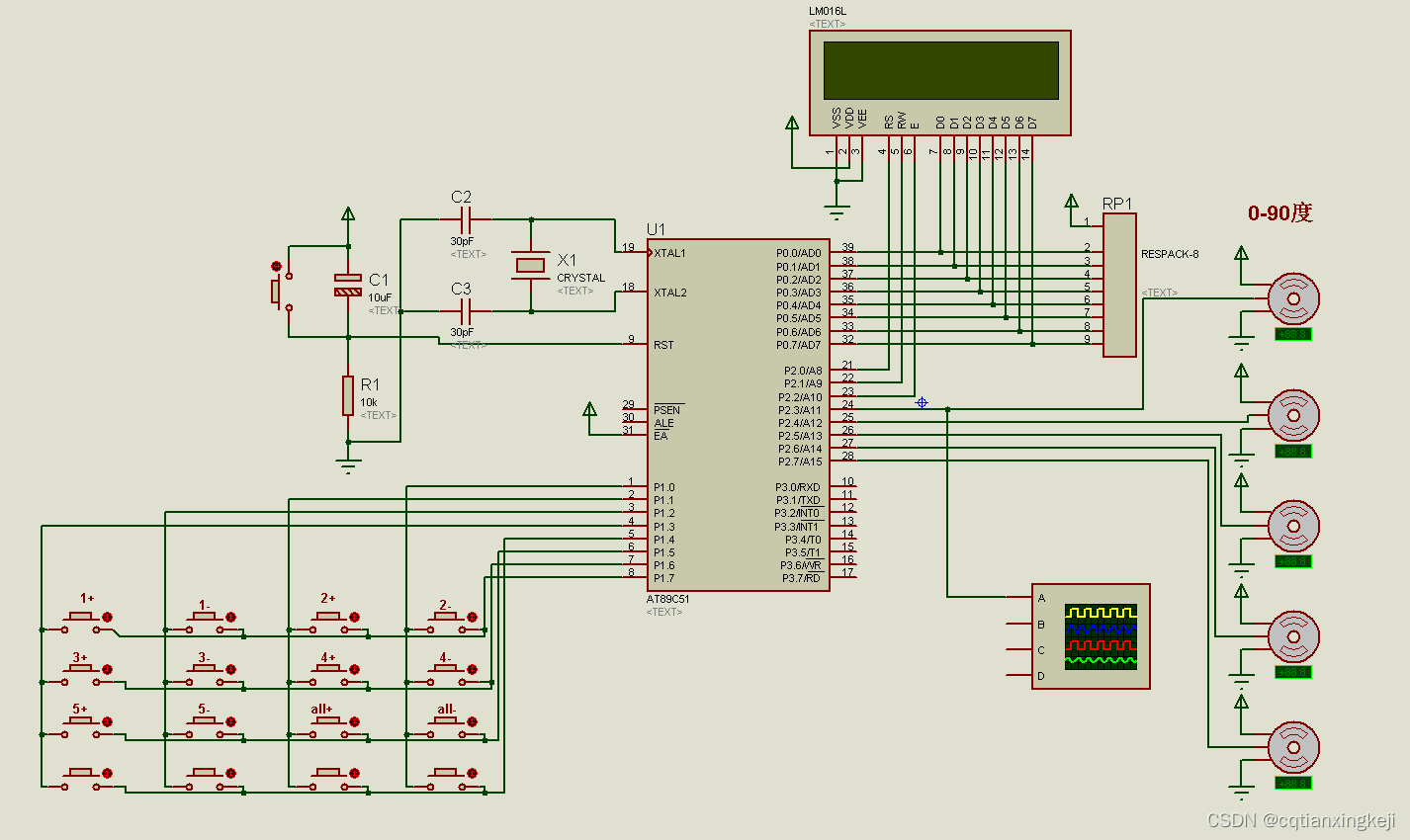
基于51单片机的舵机(5路)
一个按键控制正转一个控制反转,共10个按键,然后再用一个按键控制5个舵机同时正转一个舵机同时控制5个舵机反转,共12个按键。
LCD1602显示当前舵机的旋转角度。
注:51单片机的速度比较低,控制精度也很差。本设计的角度不能细调,只能粗调。仅供学习参考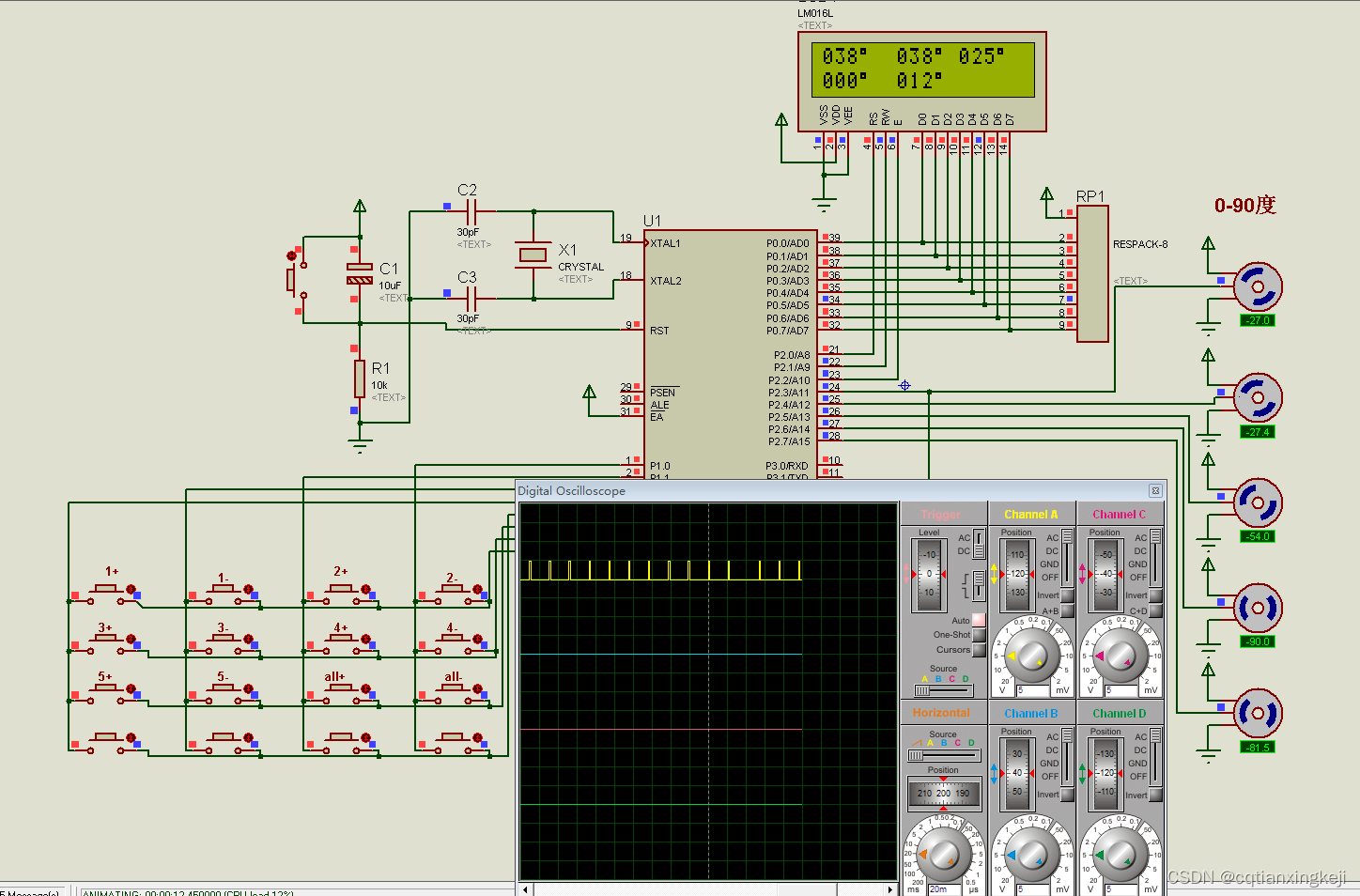
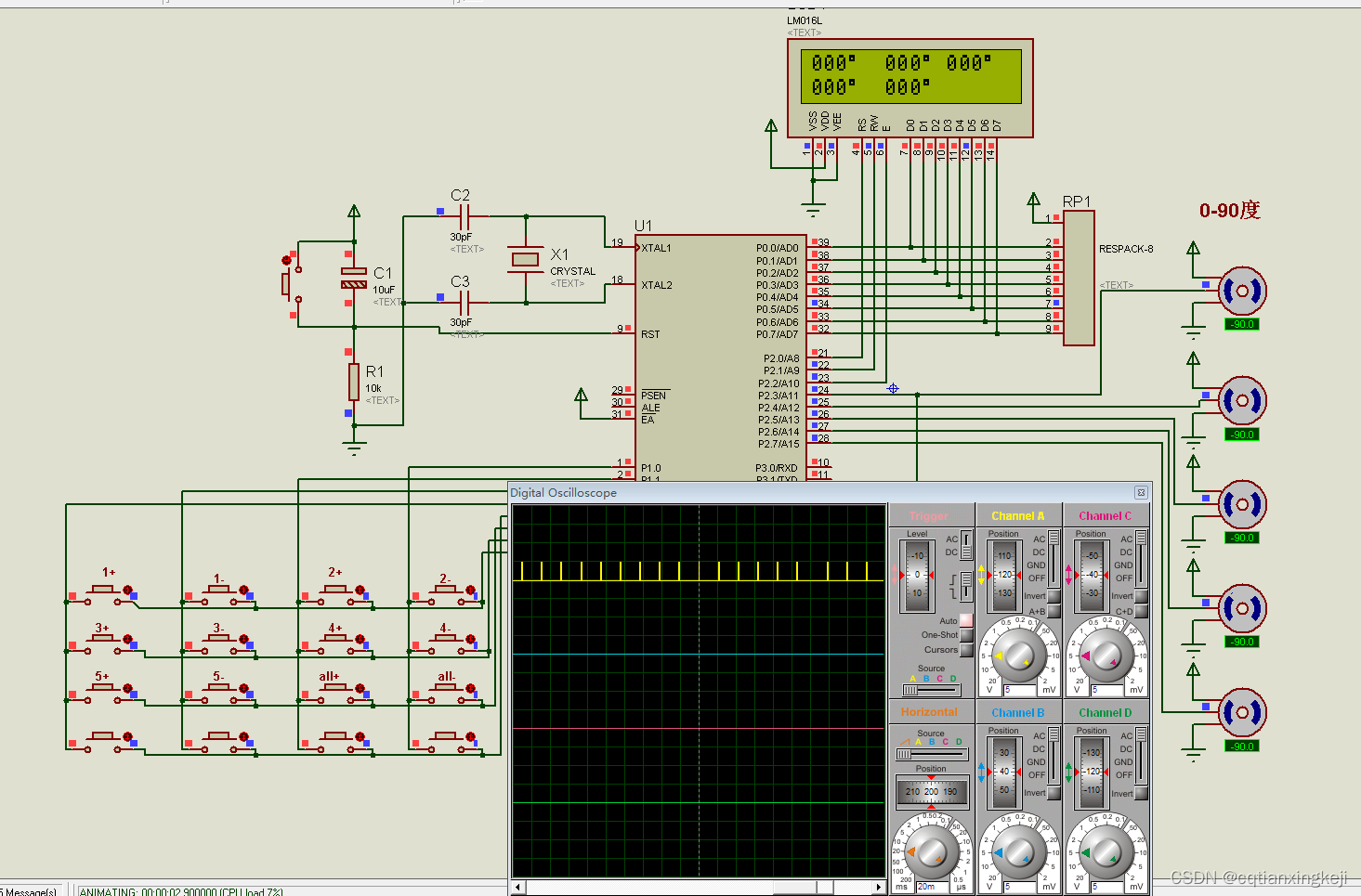

#include "reg51.h" //此文件中定义了单片机的一些特殊功能寄存器 #include "lcd1602.h" #define uchar unsigned char #define uint unsigned int sbit motor0=P2^3;//第一个电机 sbit motor1=P2^4;//第二个电机 sbit motor2=P2^5;//第三个电机 sbit motor3=P2^6;//第四个电机 sbit motor4=P2^7;//第五个电机 uchar pwm[5]={7,7,7,7,7};//每个电机占空比 uint time=0;//计时变量 uchar sec=0; uchar disp[]="000 "; /******************************************************************************* * 函 数 名 : delay(uint i) * 函数功能 : 延时 * 输 入 : i * 输 出 : 无 *******************************************************************************/ void delay(uint i) { while(i--); } /******************************************************************************* * 函 数 名 : Timer0Init * 函数功能 : 定时器0初始化 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void Timer0Init() { TMOD|=0X12;//选择为定时器0模式,工作方式1,仅用TR0打开启动。 TH0=106; //给定时器赋初值,定时100us TL0=106; TH1=0X3C;//50ms TL1=0XB0; ET1=1; ET0=1;//打开定时器0中断允许 EA=1;//打开总中断 TR0=1;//打开定时器 TR1=1; } /******************************************************************************* * 函 数 名 : Timer0Init * 函数功能 : 定时器0初始化 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ uchar key_scan()//按键检测 { uchar i,j; i=0; j=0; P1=0x0f; if(P1!=0x0f) //检测有无按下 { switch(P1)//检测行 { case 0x0e:i=3;break; case 0x0d:i=2;break; case 0x0b:i=1;break; case 0x07:i=0; } P1=0xf0; switch(P1)//检测列 { case 0xe0:j=13;break; case 0xd0:j=9;break; case 0xb0:j=5;break; case 0x70:j=1; } } return i+j; } /******************************************************************************* * 函 数 名 : main * 函数功能 : 主函数 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void main() { uchar m,i; uint k; init_1602(); disp[3]=0xdf; Timer0Init(); //定时器0初始化 while(1) { i=key_scan();//按键检测 if(i==1)//第一个电机正转 { if(pwm[0]<14) pwm[0]++; for(k=0;k<200;k++)//延时 { delay(100); } } if(i==2)//第一个电机反转 { if(pwm[0]>7) pwm[0]--; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } //======================================== if(i==3)//第二个电机正转 { if(pwm[1]<14) pwm[1]++; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } if(i==4)//第二个电机反转 { if(pwm[1]>7) pwm[1]--; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } //======================================== if(i==5)//第三个电机正转 { if(pwm[2]<14) pwm[2]++; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } if(i==6)//第三个电机反转 { if(pwm[2]>7) pwm[2]--; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } //======================================== if(i==7)//第四个电机正转 { if(pwm[3]<14) pwm[3]++; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } if(i==8)//第四个电机反转 { if(pwm[3]>7) pwm[3]--; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } //======================================== if(i==9)//第五个电机正转 { if(pwm[4]<14) pwm[4]++; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } if(i==10)//第五个电机反转 { if(pwm[4]>7) pwm[4]--; for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } //======================================== if(i==11)//全部电机反转 { for(m=0;m<5;m++) { if(pwm[m]>7) pwm[m]--; } for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } if(i==12)//全部电机正转 { for(m=0;m<5;m++) { if(pwm[m]<14) pwm[m]++; } for(k=0;k<200;k++)//延时 { if(key_scan()==0) break; delay(100); } } } } /******************************************************************************* * 函 数 名 : void Timer0() interrupt 1 * 函数功能 : 定时器0中断函数 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void Timer0() interrupt 1 { if(time<140) { time++; if(time<pwm[0])//驱动第一个电机 motor0=1; else motor0=0; if(time<pwm[1])//驱动第二个电机 motor1=1; else motor1=0; if(time<pwm[2])//驱动第三个电机 motor2=1; else motor2=0; if(time<pwm[3])//驱动第四个电机 motor3=1; else motor3=0; if(time<pwm[4])//驱动第五个电机 motor4=1; else motor4=0; } else { time=0; } } /******************************************************************************* * 函 数 名 : void Timer1() interrupt 3 * 函数功能 : 定时器1中断函数 * 输 入 : 无 * 输 出 : 无 *******************************************************************************/ void Timer1() interrupt 3 { uint i; if(sec<10) sec++; else { sec=0; //显示 i=pwm[0]; i=i-7; i=i*180/14; disp[0]=i/100+0x30; disp[1]=i%100/10+0x30; disp[2]=i%10+0x30; write_string(1,0,disp); i=pwm[1]; i=i-7; i=i*180/14; disp[0]=i/100+0x30; disp[1]=i%100/10+0x30; disp[2]=i%10+0x30; write_string(1,6,disp); i=pwm[2]; i=i-7; i=i*180/14; disp[0]=i/100+0x30; disp[1]=i%100/10+0x30; disp[2]=i%10+0x30; write_string(1,11,disp); i=pwm[3]; i=i-7; i=i*180/14; disp[0]=i/100+0x30; disp[1]=i%100/10+0x30; disp[2]=i%10+0x30; write_string(2,0,disp); i=pwm[4]; i=i-7; i=i*180/14; disp[0]=i/100+0x30; disp[1]=i%100/10+0x30; disp[2]=i%10+0x30; write_string(2,6,disp); } TH1=0X3C;//50ms TL1=0XB0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/456571
推荐阅读
相关标签

