
- 1MySQL Workbench导出数据库_mysql workbench 导出数据库
- 2Pandas 2.2 中文官方教程和指南(二十二)
- 3【FPGA入门】第八篇、FPGA驱动VGA实现动态图像移动_基于fpga调整vga显示屏的图像位置
- 4nvm安装及卸载,nrm安装及卸载_卸载nrm
- 5字节跳动笔试题总结_字节跳动在线笔试
- 6VC2008 ATL控件 去掉运行库依赖(转载)_
dynamic - 7stm32f4内部flash讲解_stm32f4 flash
- 8详解PostgreSQL聚合函数: 精准统计数据,提升效率 附代码示例_pgsql 聚合函数
- 9一文揭秘23届字节、阿里、百度等校招技术岗薪资_字节校招薪资2023
- 10【动态规划】【位运算】1787. 使所有区间的异或结果为零
基于蚁群算法的路径规划_蚁群算法路径规划
赞
踩
蚁群算法(Ant Colony Algorithm, ACO)于1991年首次提出,该算法模拟了自然界中蚂蚁的觅食行为。蚂蚁在寻找食物源时,会在其经过的路径上释放一种信息素,并能够感知其它蚂蚁释放的信息素。信息素浓度的大小表征路径的远近,信息素浓度越高,表示对应的路径距离越短。通常,蚂蚁会以较大的概率优先选择信息素浓度较高的路径,并释放一定量的信息素,以增强该条路径上的信息素浓度,这样,会形成一个正反馈。最终,蚂蚁能够找到一条从巢穴到食物源的最佳路径,即距离最短。
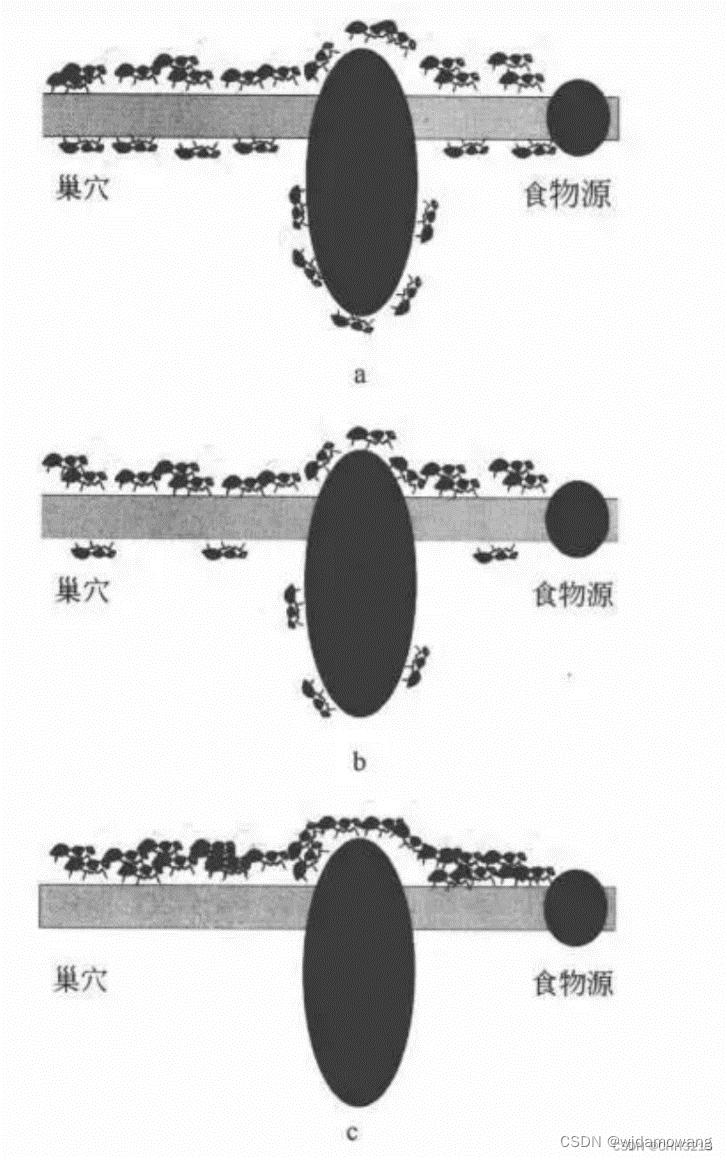
用蚂蚁的行走路径表示待优化问题的可行解, 整个蚂蚁群体的所有路径构成待优化问题的解空间。
路径较短的蚂蚁释放的信息素量较多, 随着时间的推进, 较短的路径上累积的信息素浓度逐渐增高, 选择该路径的蚂蚁个数也愈来愈多。
最终, 整个蚂蚁会在正反馈的作用下集中到最佳的路径上, 此时对应的便是待优化问题的最优解。
具体步骤如下:
设整个蚂蚊群体中蚂蚊的数量为m, 路径节点的数量为n, 节点i与节点 j 之间的相互距离为dij ( i , j = 1 , 2 , … , n ) , t时刻节点i与节点j的连接路径上的信息素浓度为τij (t),初始时刻, 各个节点间连接路径上的信息素浓度相同。
蚂蚁k( k =1,2,…,m)根据各个节点间连接路径上的信息素浓度决定其下一个访问节点, 设Pijk (t)表示t时刻蚂蚊 k从节点 i转移到节点 j的概率, 其计算公式如下:
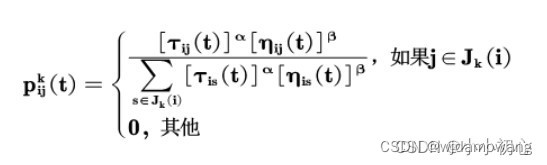
ηij(t)为启发函数, ηij(t)=1/dij,表示蚂蚊从节点i转移到节点j的期望程度。
allowk(k=1,2,…,m)为蚂蚁k待访问节点的集合。开始时,allowk中有n-1个元素,即包括除了蚂蚁k出发节点的其它所有节点。随着时间的推进, allowk中的元素不断减少, 直至为空, 即表示所有的节点均访问完毕。
α为信息素重要程度因子,其值越大, 蚂蚁选择之前走过的路径可能性就越大,搜索路径的随机性减弱,其值越小,蚁群搜索范围就会减少,容易陷入局部最优。一般取值范围为[0,5]。
β为启发函数重要程度因子,其值越大,表示启发函数在转移中的作用越大, 即蚂蚊会以较大的摡率转移到距离短的节点,蚁群就越容易选择局部较短路径,这时算法的收敛速度是加快了,但是随机性却不高,容易得到局部的相对最优。一般取值范围为[0,5]。
计算完节点间的转移概率后,采用轮盘赌方法选择下一个待访问的节点。依据轮盘赌法来选择下一个待访问的节点,而不是直接按概率大小选择,是因为这样可以扩大搜索范围,进而寻找全局最优,避免陷入局部最优。首先计算每个个体的累积概率qj ,之后随机生成一个(0,1)的小数r,比较所有qj与r的大小,选出大于r的最小的那个qj,该qj对应的索引j即为第k只蚂蚁在第i条路径时下一步要选择的目标点。
蚂蚁信息素更新的模型包括蚁周模型(Ant-Cycle模型)、蚁量模型(Ant-Quantity模型)、蚁密模型(Ant-Density模型)等。
区别:
蚁周模型利用的是全局信息,即蚂蚁完成一个循环后更新所有路径上的信息素。
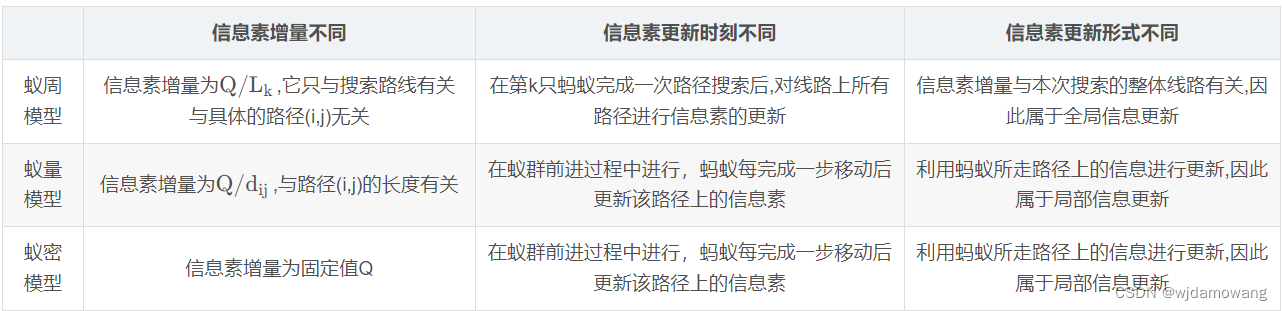 蚁量和蚁密模型利用的是局部信息,即蚂蚁完成一步后更新路径上的信息素。
蚁量和蚁密模型利用的是局部信息,即蚂蚁完成一步后更新路径上的信息素。
在蚂蚁释放信息素的同时,各个节点间连接路径上的信息素逐渐消失,设参数ρ(0<ρ<1,一般取值为0.1~0.99 )表示信息素的挥发程度。当所有的蚂蚁完成一次循环后,各个节点间链接路径上的信息素浓度需进行更新,计算公式为
τijt+1=1-ρτijt+Δτij![]()
Δτij=k=1nΔτijk![]()
其中,Δτijk表示第k只蚂蚁在节点i与节点j连接路径上释放的信息素浓度;Δτij表示所有蚂蚁在节点i与节点j连接路径上释放的信息素浓度之和。
算法流程图如下:

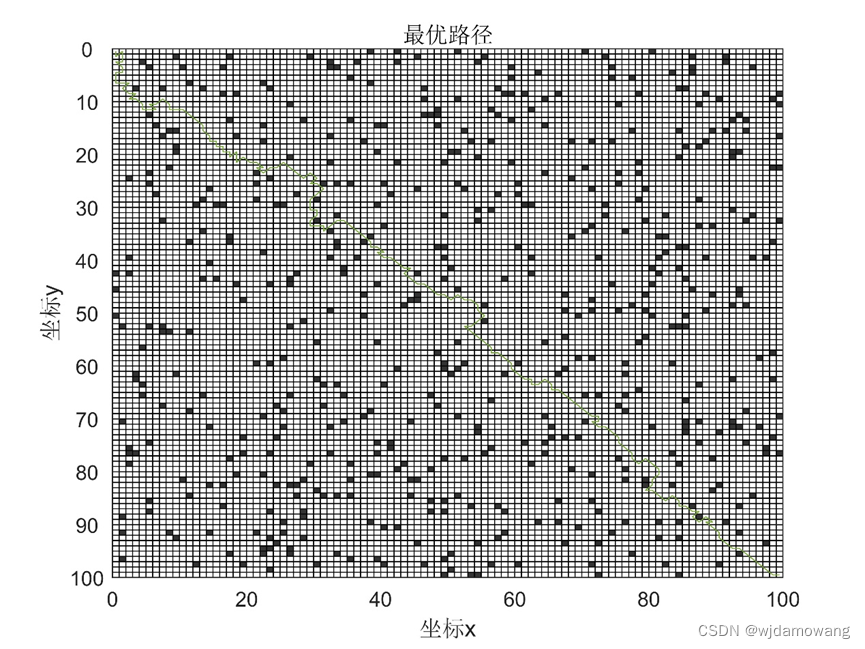
在实验中,设定的蚂蚁数量为50,迭代200次。在100*100的地图上随机生成地图(通过MATLAB的binornd函数实现)。从左上角顶点处(起点)走到右下角顶点处(终点),结果如下。

实验代码如下
clc
clear
G=binornd(1,0.05,100,100);
G(1,1)=0;
G(100,100)=0;
MM=size(G,1); %G地形图为01矩阵,如果为1表示障碍物
Tau=ones(MM*MM,MM*MM); %Tau初始信息素矩阵 大小要与Alpha系数匹配
%Tau=8.*Tau;
K=200; %迭代次数(指蚂蚁出动多少波)
M=50; %蚂蚁个数
S=1; %最短路径的起始点
E=MM*MM; %最短路径的目的点
Alpha=1; %Alpha表征信息素重要程度的参数
Beta=7; %Beta表征启发式因子重要程度的参数
Rho=0.4; %Rho信息素蒸发系数
Q=1; %Q信息素增加强度系数
minkl=inf; %minkl表示当前最短路径长度
mink=0; %当前完成最短路径为第几次迭代
minl=0; %当前完成最短路径为第只蚂蚁
D=G2D(G); %每个栅格至各自邻域无障碍栅格的代价值
N=size(D,1); %N表示问题的规模(像素个数)
a=1; %小方格像素的边长
Ex=a*(mod(E,MM)-0.5); %目的点横坐标
if Ex==-0.5
Ex=MM-0.5;
end
Ey=a*(MM+0.5-ceil(E/MM)); %目的点纵坐标
Eta=zeros(1,N); %启发式信息矩阵,记录启发式信息
%以下开始建立启发式信息矩阵
for i=1:N %每个栅格的索引号,一共N个栅格
ix=a*(mod(i,MM)-0.5); %矩阵中各点的横坐标
if ix==-0.5
ix=MM-0.5;
end
iy=a*(MM+0.5-ceil(i/MM)); %矩阵中各点的纵坐标
if i~=E
Eta(i)=1/((ix-Ex)^2+(iy-Ey)^2)^0.5; %启发信息取为至目标点的直线距离的倒数
else
Eta(i)=100;
end
end
ROUTES=cell(K,M); %用细胞结构存储第K次迭代中的第M只蚂蚁的爬行路线
PL=zeros(K,M); %用矩阵存储第K次迭代中的第M只蚂蚁爬行路线的长度
%开始K次迭代,每轮派出M只蚂蚁,开始寻找路径
for k=1:K %第K次迭代
for m=1:M %第M只蚂蚁
%状态初始化
W=S; %将当前节点初始化为起始点
Path=S; %爬行路线初始化
PLkm=0; %爬行路线长度初始化
TABUkm=ones(N); %禁忌表初始化为1,禁忌表记录走过的位置,将走过的位置由1变0
TABUkm(S)=0; %将禁忌表起点位置置为0
DD=D; %邻栅格点初始化
%下一步可以前往的栅格点
DW=DD(W,:); %取G2D矩阵中以当前点为局部起始点的一行
DW1=find(DW); %DW1矩阵存储该行中所有无障碍相邻栅格点(元素不为0)的索引位置
for j=1:length(DW1)
if TABUkm(DW1(j))==0 %判断TABUkm禁忌表中,该位置是否为之前走过的点
DW(DW1(j))=0; %删除DW中所有之前已经走过的相邻栅格点
end
end %现在DW中为当前栅格点可以选择的所有相邻栅格点了
%计算各可选择邻节点的选择概率
LJD=find(DW); %LJD记录未走过的点的索引号,即下一步可选的点
Len_LJD=length(LJD);%可选点的个数
%蚂蚁未遇到食物或者陷入死胡同或者觅食停止
while W~=E&&Len_LJD>=1 %起始点不等于终止点,且可选节点个数大于等于1
%转轮赌法选择下一步怎么走
PP=zeros(Len_LJD);
for i=1:Len_LJD
PP(i)=(Tau(W,LJD(i))^Alpha)*((Eta(LJD(i)))^Beta);
%PP(i)=(Tau(W,LJD(i))^Alpha)*((D(W,LJD(i)))^Beta); %效果很差
end
sumpp=sum(PP);
PP=PP/sumpp;%蚂蚁从当前栅格点转移到各相邻栅格点的概率
Pcum(1)=PP(1);
%轮盘赌选择下一栅格点
for i=2:Len_LJD
Pcum(i)=Pcum(i-1)+PP(i);
end
Select=find(Pcum>=rand);
%选择积累概率比随机数大的第一个可选择点作为行走的下一步,并取该点的索引号
to_visit=LJD(Select(1));
%状态更新和记录
Path=[Path,to_visit]; %路径增加
PLkm=PLkm+DD(W,to_visit); %路径长度增加
W=to_visit; %蚂蚁移到下一个点
%对应禁忌表更新D中可选择的相邻栅格点
for kk=1:N
if TABUkm(kk)==0
DD(W,kk)=0;
DD(kk,W)=0;
end
end
TABUkm(W)=0; %更新禁忌表
DW=DD(W,:);
DW1=find(DW);
for j=1:length(DW1)
if TABUkm(DW1(j))==0
DW(DW1(j))=0;
end
end
LJD=find(DW);
Len_LJD=length(LJD);%可选节点的个数
end %本次迭代的当前蚂蚁寻路完毕
%记下每一代每一只蚂蚁的觅食路线和路线长度
ROUTES{k,m}=Path; %记录本次迭代中的当前蚂蚁的行走路线
if Path(end)==E %判断本只蚂蚁寻找路径的最后一个节点是否为终点
PL(k,m)=PLkm; %若该蚂蚁到达终点,将本次路线长度放到PL的第k行m列
if PLkm<minkl %若本次路径长度<当前已知的最短路径长度
mink=k; %记录完成本次最短路径的迭代次数
minl=m; %记录完成本次最短路程的哪只蚂蚁
minkl=PLkm; %记录本次最短路线的长度
end
else
PL(k,m)=0; %若该蚂蚁没有到达终点,则本次路径长度为0
end
end %返回进行下一只蚂蚁的寻路
%更新信息素
Delta_Tau=zeros(N,N);%初始化信息素增量
for m=1:M
if PL(k,m)
ROUT=ROUTES{k,m}; %ROUT取本次迭代的所有蚂蚁的行走路线
TS=length(ROUT)-1;
PL_km=PL(k,m); %PL_km取本次迭代当前蚂蚁的路径长度
for s=1:TS
x=ROUT(s);
y=ROUT(s+1);
Delta_Tau(x,y)=Delta_Tau(x,y)+Q/PL_km;
%Delta_Tau(y,x)=Delta_Tau(y,x)+Q/PL_km; %这里源代码写错了,不能加
end
end
end
Tau=(1-Rho).*Tau+Delta_Tau;%信息素挥发一部分,新增加一部分
end
%绘图
plotif=1;%是否绘图的控制参数
if plotif==1 %绘收敛曲线
minPL=zeros(K);
for i=1:K %选出每次迭代的最短路径
PLK=PL(i,:); %取第i次迭代的所有路径长度
Nonzero=find(PLK); %提取本次迭代路径长度不为0的索引号存储至Nonzero
if isempty(Nonzero)
minPL(i)=0;
else
PLKPLK=PLK(Nonzero);
minPL(i)=min(PLKPLK); %选出本次迭代最短路径存储至minPL的相应迭代位置
end
end
%绘制“收敛曲线变化趋势”图,将每次迭代的最短路径放在图中表示
FFF=[];
WWJ=minPL(:,1);
for i=1:length(WWJ)
if WWJ(i)~=0
FFF=[FFF;[i,WWJ(i)]];
end
end
figure(1)
plot(FFF(:,1),FFF(:,2));
axis([0 200 0 1000]);
hold on
grid on
title('收敛曲线变化趋势');
xlabel('迭代次数');
ylabel('最小路径长度');
%绘爬行图
figure(2)
axis([0,MM,0,MM]) %设置图的横纵坐标,MM为地图矩阵的行数或列数
for i=1:MM
for j=1:MM
if G(i,j)==1 %1是黑色代表障碍,0为白色无障碍
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[0.2,0.2,0.2]); %将1234点所围成的图形进行黑色填充
hold on
else
x1=j-1;y1=MM-i;
x2=j;y2=MM-i;
x3=j;y3=MM-i+1;
x4=j-1;y4=MM-i+1;
fill([x1,x2,x3,x4],[y1,y2,y3,y4],[1,1,1]); %将1234点所围成的图形进行白色填充
hold on
set(gca,'YTickLabel',[100 90 80 70 60 50 40 30 20 10 0]); %使得地图的矩阵的行列与正常坐标轴的行列一致
%set(gca,'YTickLabel');
end
end
end
hold on
title('最优路径');
xlabel('坐标x');
ylabel('坐标y');
ROUT=ROUTES{mink,minl};
%ROUT取最短行走路线,mink为该路线的迭代号,minl为该路线的蚂蚁号
LENROUT=length(ROUT);
%Rx与Ry中分别存储具体的该路线
Rx=ROUT;
Ry=ROUT;
%将该路线的栅格索引号转换为横纵坐标
for ii=1:LENROUT
Rx(ii)=a*(mod(ROUT(ii),MM)-0.5);
if Rx(ii)==-0.5
Rx(ii)=MM-0.5;
end
Ry(ii)=a*(MM+0.5-ceil(ROUT(ii)/MM));
end
plot(Rx,Ry) %绘蚂蚁爬行图
end

