
热门标签
热门文章
- 1王爽 汇编语言 第三章 实验二_汇编语言实验二王爽
- 2从分布式一致性算法到区块链共识算法(一)_一般来讲,强一致性
- 3论文阅读:FLGCNN: A novel fully convolutional neural network for end-to-endmonaural speech enhancement_flgcnn: a novel fully con- volutional neural netwo
- 4mysql数据库:迁移数据目录至另一台服务器步骤_mysql数据库迁移到另一台服务器
- 5KG-开源项目:QASystemOnMedicalKG【以疾病为中心的一定规模医药领域知识图谱,并以该知识图谱完成自动问答与分析服务】
- 6paddle detection 配置文件怎么实例化的 代码梳理 -----(regiester)
- 7【网站项目】游戏美术外包管理信息系统
- 8Navicat premium 15出现的bug集合_navicat premium 筛选 按不了
- 9uniapp - [安卓|苹果]实现App端引入高德地图,详细获取当前用户手机定位、两个地点的路线规划及相关示例代码,uniapp安卓Android平台软件下使用高德地图,获取当前位置信息及规划路线_uni-app 安卓app中导入高德地图
- 10GPT提示词系统学习-第三课-规范化提示让样本走在提示词前_gpt提示语 qa问答
当前位置: article > 正文
标准DH参数建模(SHD)与修改DH建模(MDH)总结_mdh建模顺序
作者:我家小花儿 | 2024-05-07 19:27:04
赞
踩
mdh建模顺序
目录
DH建模基础

SDH建模
特点
SDH关节i+1固连的是i坐标系,即坐标系建立在输出端
坐标系建立规则
下面介绍顺序即坐标系建立顺序:
1、轴:
取关节i+1的轴线方向为轴方向(方向任选,但通常将Z轴平行的指向取一致)。
2、轴:
轴与
轴最短公垂线方向(指向:由
轴指向
轴,并且基坐标系
的指向任意,一般取与大地坐标系一致或者与
一致)
注意:若轴与
轴相交,则
轴垂直于所交平面
3、原点:
轴与
轴的交点处
4、轴:
通过通过右手螺旋定则判断(指向:四指方向由轴指向
轴,大拇指指向即是
轴指向)
SDH参数获取规则
下面介绍顺序即是参数获取顺序
1、关节参数
(1)、关节角(变化量):
绕轴,将
轴旋转到与
轴平行的角度
(2)、关节距离(变化量):
沿轴,将
轴平移到与
轴共线的距离
2、连杆参数
(1)、连杆长度(不变量):
沿轴将
原点移动到与
原点重合的距离
(2)、连杆角度(不变量):
绕轴将
轴旋转到与
轴重合且指向一致的角度
SDH参数表建立规则
| 1 | ||||
| 2 | ||||
| ··· | ||||
| i-1 | ||||
| i |
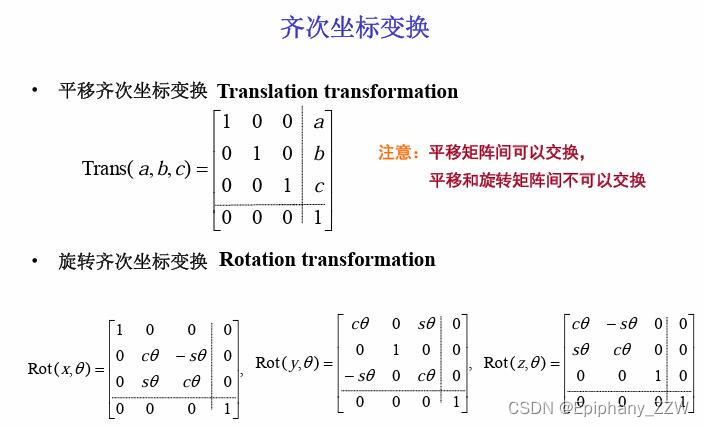
坐标系转换矩阵基本公式(注意:这仅适用于SDH,因为矩阵左乘和右乘结果不一样,一定要注意坐标系变换顺序):
通过坐标系转换矩阵基本公式并结合SDH参数表,便可以获得末端之于DH基点的表达式。
SDH建模示例

未完待续····
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/550826
推荐阅读
相关标签

