
热门标签
热门文章
- 1python123题目——特殊数列求和_用户输入一个小于10的正整数n,求1 + 12 + 123 + 1234 + …… 的前n项的和。当
- 2软件测试常用的7种方法,最后一个是升职加薪关键!(零基础小白转行IT互联网高效进阶)_软件测试方法
- 3Mac m1安装AWVS
- 4USB Hub
- 5Data truncation: Incorrect datetime value: ‘0000-00-00 00:00:00.000‘ for column ‘createTime‘ at row
- 6倒计时3天!点击查看openGauss Summit 2023关键词
- 7wazuh4.7利用python脚本发送告警信息到飞书机器人_wazuh 配置告警
- 8python做数据查询系统_[Python实战] 功能简单的数据查询及可视化系统
- 9Golang入门
- 10[MySQL] error 1292 数据类型错误_truncated incorrect double value: 'a
当前位置: article > 正文
ubuntu22.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM+Gazebo仿真运行ORB-SLAM2+各种相关库的安装时遇到的相关问题_22.04ros2使用orbslam3
作者:我家小花儿 | 2024-05-30 12:44:26
赞
踩
22.04ros2使用orbslam3
参考文献:Ubuntu 20.04配置ORB-SLAM2和ORB-SLAM3运行环境+ROS实时运行ORB-SLAM+Gazebo仿真运行ORB-SLAM2+各种相关库的安装_ubuntu20.04orb-slam2环境配置_ZARD帧心的博客-CSDN博客
问题一:安装Pangolin 第二步配置并编译时遇到
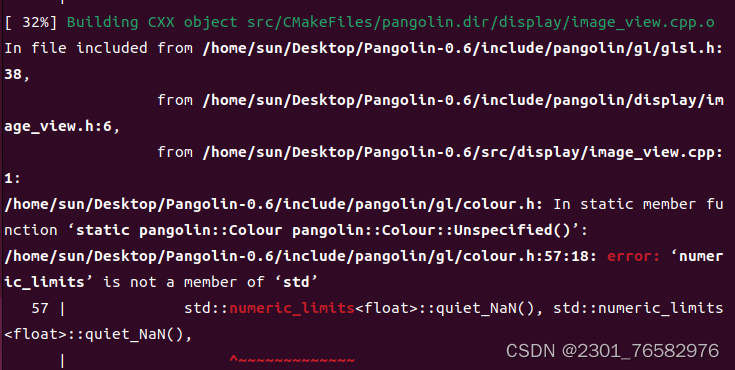

问题分析:由于缺少头文件导致编译不成功
解决方案:打开对应的文件,添加头文件
![]()
保存关闭再次make 即可。
问题二:安装安装OpenCV3配置并编译步骤make出错
具体问题是c++版本不匹配,需将其版本配置11以下,首先查看c++版本,之后下载,将下载的版本设置为优先级,更新之后再次make即可。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/647001
推荐阅读
相关标签

