
热门标签
热门文章
- 1【PyQt5桌面应用开发】1.可视化环境搭建步骤(超级详细)_pyqt 可视化工具
- 2WPF简单动画之加载本地图片集
- 3四种重要的非关系型数据库
- 4JDBC连接MySQL数据库com.mysql.cj.jdbc.Driver
- 5带你一起学kivy第一天_kivy designer 教程
- 6详解Python中的split()函数的使用方法_os.path.split
- 7Spring Boot中的CSRF攻击及预防_springboot 启用csrf保护
- 8pycharm远程连接服务器(可用于远程调试)_pycharm远程服务器调试csdn
- 9ipa在线下载安装(itms-services)_ipa安装
- 10Python最全的pip换源-国内镜像源 提高下载速度_pip install 国内源
当前位置: article > 正文
基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真
作者:我家小花儿 | 2024-06-17 11:50:53
赞
踩
基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真
目录
1.课题概述
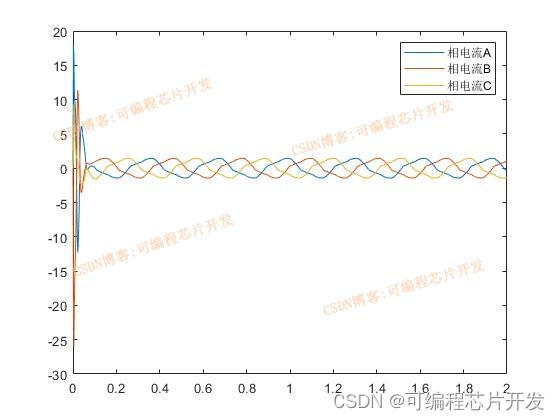
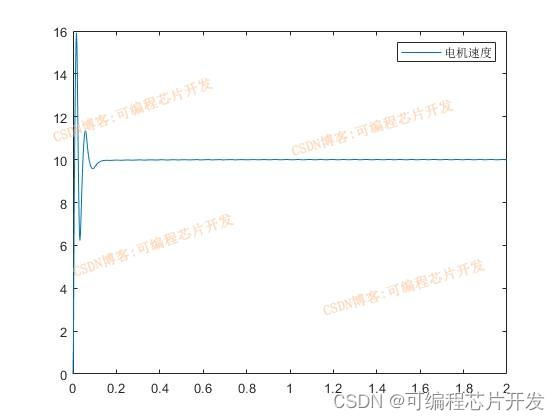
基于FOC控制器的BLDC无刷直流电机控制系统matlab编程与仿真,使用MATLAB编程实现,包括FOC控制器,clark,park等,不使用simulink建模。仿真输出三相电流,电机转速以及转子角度。
2.系统仿真结果


3.核心程序与模型
版本:MATLAB2022a
- %矢场定向控制
- function [A,B,C] = func_foc_controller(a,b,c,theta,q_ref)
- % 为了与q轴对齐进行相位校正
- theta = theta - pi/2;
- % 计算cos(theta)
- yc = cos(theta);
- % 计算sin(theta)
- ys = sin(theta);
-
- %克拉克变换abc to alpha beta
- [alpha,beta] = func_clark(a,b,c);
-
- % Clark到Park变换 - αβ到dq坐标系
- [d,q] = func_clark2park(alpha,beta,yc,ys);
- %磁通量调节器
- d = 0-d;
- q = q_ref-q;
-
- %Park变换回到Clarke变换 - dq到αβ
- [alpha,beta] = func_park2clark(d,q,yc,ys);
- % 输出ABC
- A = alpha;
- B = - alpha*0.5 + 0.8661*beta;
- C = - alpha*0.5 - 0.8661*beta;
-
- end
- 68

4.系统原理简介
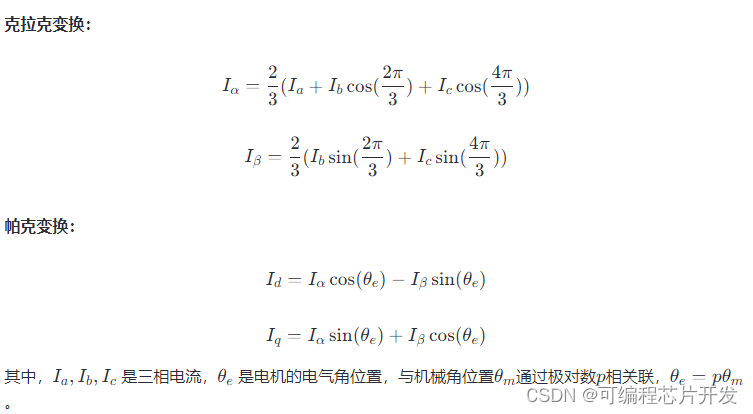
基于磁场定向控制(Field-Oriented Control, FOC)的无刷直流电机(BLDC)控制系统是一种高级控制策略,旨在实现电机的高效、平滑运行以及高动态响应。FOC的核心思想是将电机的三相交流电流分解到两个正交的坐标系中,分别对应电机的励磁(d轴)和转矩(q轴),通过独立控制这两个轴上的电流来精确控制电机的磁场和输出转矩。
在FOC中,首先通过坐标变换将三相定子电流从三相静止坐标系(αβ)转换到两相旋转坐标系(dq)。这种转换基于克拉克(Clarke)变换和帕克(Park)变换,目的是分离出影响磁场和转矩的电流分量。
在dq坐标系下,通过PID控制器分别调节Id和Iq至给定值,以实现对电机励磁电流和转矩电流的精确控制。

FOC的优势在于其能实现电机的高效率和平稳运行,尤其在宽速度范围内。然而,FOC系统设计和实现面临诸多挑战,包括高精度的电气角位置估算、复杂的控制算法实现、以及对控制器计算能力的高要求。
5.完整工程文件
(完整程序运行后无水印)
v
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家小花儿/article/detail/731063
推荐阅读
相关标签

