
- 1深鸿会深大小组学习笔记:第二周,从零开发鸿蒙小游戏2048app(下)_在开发板(/dev/fb0)上显示2048小游戏
- 2php对接谷歌admob广告收益reporting api分享
- 3Python爬取广州链家二手房数据_python数据爬取广州二手房
- 4Leaflet基础入门教程(一)_leaflet框架
- 5限流之redis 有序集合(zset)实现滑动窗口_redistemplate zadd
- 6Python使用pandas读取excel表格数据_python pd读取excel
- 7netty_netty电台
- 8【学习】感受野
- 9yolov5s 预训练模型_「预训练语言模型专题」跨语种语言模型
- 10vscode:导入python项目后无法跳转到定义问题解决_you need to select a python interpreter before you
【路径规划】基于A星算法实现栅格地图路径规划_栅格路径规划c语言
赞
踩
一、简介
1.1搜索区域(The Search Area)
我们假设某人要从 A 点移动到 B 点,但是这两点之间被一堵墙隔开。如图 1 ,绿色是 A ,红色是 B ,中间蓝色是墙。
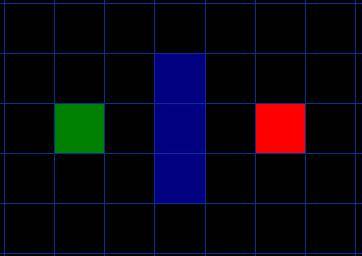
![]()
图 1
你应该注意到了,我们把要搜寻的区域划分成了正方形的格子。这是寻路的第一步,简化搜索区域,就像我们这里做的一样。这个特殊的方法把我们的搜索区域简化为了 2 维数组。数组的每一项代表一个格子,它的状态就是可走 (walkalbe) 和不可走 (unwalkable) 。通过计算出从 A 到 B需要走过哪些方格,就找到了路径。一旦路径找到了,人物便从一个方格的中心移动到另一个方格的中心,直至到达目的地。
方格的中心点我们成为“节点 (nodes) ”。如果你读过其他关于 A* 寻路算法的文章,你会发现人们常常都在讨论节点。为什么不直接描述为方格呢?因为我们有可能把搜索区域划为为其他多变形而不是正方形,例如可以是六边形,矩形,甚至可以是任意多变形。而节点可以放在任意多边形里面,可以放在多变形的中心,也可以放在多边形的边上。我们使用这个系统,因为它最简单。
1.2开始搜索(Starting the Search)
一旦我们把搜寻区域简化为一组可以量化的节点后,就像上面做的一样,我们下一步要做的便是查找最短路径。在 A* 中,我们从起点开始,检查其相邻的方格,然后向四周扩展,直至找到目标。
我们这样开始我们的寻路旅途:
1. 从起点 A 开始,并把它就加入到一个由方格组成的 open list( 开放列表 ) 中。这个 open list 有点像是一个购物单。当然现在 open list 里只有一项,它就是起点 A ,后面会慢慢加入更多的项。 Open list 里的格子是路径可能会是沿途经过的,也有可能不经过。基本上 open list 是一个待检查的方格列表。
2. 查看与起点 A 相邻的方格 ( 忽略其中墙壁所占领的方格,河流所占领的方格及其他非法地形占领的方格 ) ,把其中可走的 (walkable) 或可到达的 (reachable) 方格也加入到 open list 中。把起点 A 设置为这些方格的父亲 (parent node 或 parent square) 。当我们在追踪路径时,这些父节点的内容是很重要的。稍后解释。
3. 把 A 从 open list 中移除,加入到 close list( 封闭列表 ) 中, close list 中的每个方格都是现在不需要再关注的。
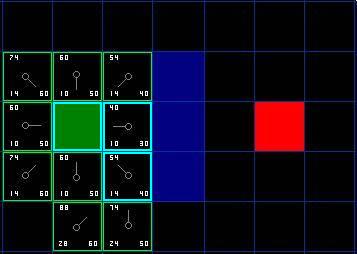
如下图所示,深绿色的方格为起点,它的外框是亮蓝色,表示该方格被加入到了 close list 。与它相邻的黑色方格是需要被检查的,他们的外框是亮绿色。每个黑方格都有一个灰色的指针指向他们的父节点,这里是起点 A 。
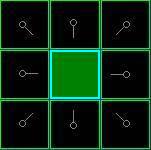
![]()
图 2 。
下一步,我们需要从 open list 中选一个与起点 A 相邻的方格,按下面描述的一样或多或少的重复前面的步骤。但是到底选择哪个方格好呢?具有最小 F 值的那个。
1.3路径排序(Path Sorting)
计算出组成路径的方格的关键是下面这个等式:
F = G + H
这里,
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。
H = 从指定的方格移动到终点 B 的估算成本。这个通常被称为试探法,有点让人混淆。为什么这么叫呢,因为这是个猜测。直到我们找到了路径我们才会知道真正的距离,因为途中有各种各样的东西 ( 比如墙壁,水等 ) 。本教程将教你一种计算 H 的方法,你也可以在网上找到其他方法。
我们的路径是这么产生的:反复遍历 open list ,选择 F 值最小的方格。这个过程稍后详细描述。我们还是先看看怎么去计算上面的等式。
如上所述, G 是从起点A移动到指定方格的移动代价。在本例中,横向和纵向的移动代价为 10 ,对角线的移动代价为 14 。之所以使用这些数据,是因为实际的对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移动代价。使用 10 和 14 就是为了简单起见。比例是对的,我们避免了开放和小数的计算。这并不是我们没有这个能力或是不喜欢数学。使用这些数字也可以使计算机更快。稍后你便会发现,如果不使用这些技巧,寻路算法将很慢。
既然我们是沿着到达指定方格的路径来计算 G 值,那么计算出该方格的 G 值的方法就是找出其父亲的 G 值,然后按父亲是直线方向还是斜线方向加上 10 或 14 。随着我们离开起点而得到更多的方格,这个方法会变得更加明朗。
有很多方法可以估算 H 值。这里我们使用 Manhattan 方法,计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动,然后把总数乘以 10 。之所以叫做 Manhattan 方法,是因为这很像统计从一个地点到另一个地点所穿过的街区数,而你不能斜向穿过街区。重要的是,计算 H 是,要忽略路径中的障碍物。这是对剩余距离的估算值,而不是实际值,因此才称为试探法。
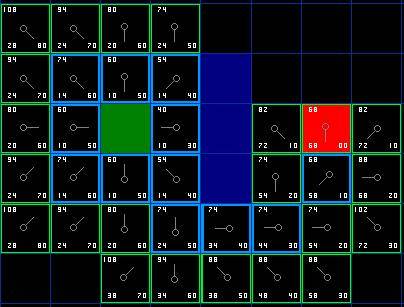
把 G 和 H 相加便得到 F 。我们第一步的结果如下图所示。每个方格都标上了 F , G , H 的值,就像起点右边的方格那样,左上角是 F ,左下角是 G ,右下角是 H 。
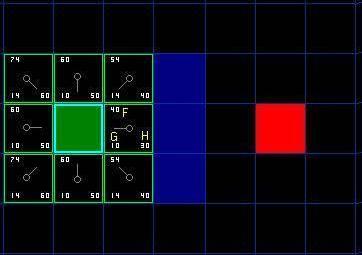
![]()
图 3
好,现在让我们看看其中的一些方格。在标有字母的方格, G = 10 。这是因为水平方向从起点到那里只有一个方格的距离。与起点直接相邻的上方,下方,左方的方格的 G 值都是 10 ,对角线的方格 G 值都是 14 。
H 值通过估算起点于终点 ( 红色方格 ) 的 Manhattan 距离得到,仅作横向和纵向移动,并且忽略沿途的墙壁。使用这种方式,起点右边的方格到终点有 3 个方格的距离,因此 H = 30 。这个方格上方的方格到终点有 4 个方格的距离 ( 注意只计算横向和纵向距离 ) ,因此 H = 40 。对于其他的方格,你可以用同样的方法知道 H 值是如何得来的。
每个方格的 F 值,再说一次,直接把 G 值和 H 值相加就可以了。
1.4继续搜索(Continuing the Search)
为了继续搜索,我们从 open list 中选择 F 值最小的 ( 方格 ) 节点,然后对所选择的方格作如下操作:
4. 把它从 open list 里取出,放到 close list 中。
5. 检查所有与它相邻的方格,忽略其中在 close list 中或是不可走 (unwalkable) 的方格 ( 比如墙,水,或是其他非法地形 ) ,如果方格不在open lsit 中,则把它们加入到 open list 中。
把我们选定的方格设置为这些新加入的方格的父亲。
6. 如果某个相邻的方格已经在 open list 中,则检查这条路径是否更优,也就是说经由当前方格 ( 我们选中的方格 ) 到达那个方格是否具有更小的 G 值。如果没有,不做任何操作。
相反,如果 G 值更小,则把那个方格的父亲设为当前方格 ( 我们选中的方格 ) ,然后重新计算那个方格的 F 值和 G 值。如果你还是很混淆,请参考下图。
![]()
图 4
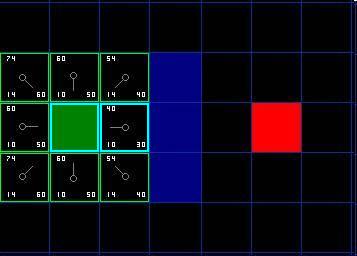
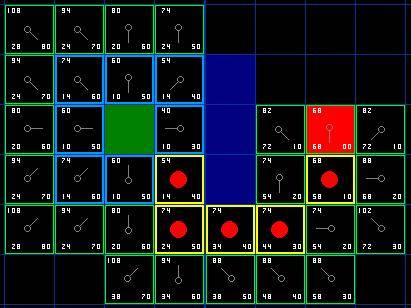
Ok ,让我们看看它是怎么工作的。在我们最初的 9 个方格中,还有 8 个在 open list 中,起点被放入了 close list 中。在这些方格中,起点右边的格子的 F 值 40 最小,因此我们选择这个方格作为下一个要处理的方格。它的外框用蓝线打亮。
首先,我们把它从 open list 移到 close list 中 ( 这就是为什么用蓝线打亮的原因了 ) 。然后我们检查与它相邻的方格。它右边的方格是墙壁,我们忽略。它左边的方格是起点,在 close list 中,我们也忽略。其他 4 个相邻的方格均在 open list 中,我们需要检查经由这个方格到达那里的路径是否更好,使用 G 值来判定。让我们看看上面的方格。它现在的 G 值为 14 。如果我们经由当前方格到达那里, G 值将会为 20(其中 10 为到达当前方格的 G 值,此外还要加上从当前方格纵向移动到上面方格的 G 值 10) 。显然 20 比 14 大,因此这不是最优的路径。如果你看图你就会明白。直接从起点沿对角线移动到那个方格比先横向移动再纵向移动要好。
当把 4 个已经在 open list 中的相邻方格都检查后,没有发现经由当前方格的更好路径,因此我们不做任何改变。现在我们已经检查了当前方格的所有相邻的方格,并也对他们作了处理,是时候选择下一个待处理的方格了。
因此再次遍历我们的 open list ,现在它只有 7 个方格了,我们需要选择 F 值最小的那个。有趣的是,这次有两个方格的 F 值都 54 ,选哪个呢?没什么关系。从速度上考虑,选择最后加入 open list 的方格更快。这导致了在寻路过程中,当靠近目标时,优先使用新找到的方格的偏好。但是这并不重要。 ( 对相同数据的不同对待,导致两中版本的 A* 找到等长的不同路径 ) 。
我们选择起点右下方的方格,如下图所示。
![]()
图 5
这次,当我们检查相邻的方格时,我们发现它右边的方格是墙,忽略之。上面的也一样。
我们把墙下面的一格也忽略掉。为什么?因为如果不穿越墙角的话,你不能直接从当前方格移动到那个方格。你需要先往下走,然后再移动到那个方格,这样来绕过墙角。 ( 注意:穿越墙角的规则是可选的,依赖于你的节点是怎么放置的 )
这样还剩下 5 个相邻的方格。当前方格下面的 2 个方格还没有加入 open list ,所以把它们加入,同时把当前方格设为他们的父亲。在剩下的3 个方格中,有 2 个已经在 close list 中 ( 一个是起点,一个是当前方格上面的方格,外框被加亮的 ) ,我们忽略它们。最后一个方格,也就是当前方格左边的方格,我们检查经由当前方格到达那里是否具有更小的 G 值。没有。因此我们准备从 open list 中选择下一个待处理的方格。
不断重复这个过程,直到把终点也加入到了 open list 中,此时如下图所示。
![]()
图 6
注意,在起点下面 2 格的方格的父亲已经与前面不同了。之前它的 G 值是 28 并且指向它右上方的方格。现在它的 G 值为 20 ,并且指向它正上方的方格。这在寻路过程中的某处发生,使用新路径时 G 值经过检查并且变得更低,因此父节点被重新设置, G 和 F 值被重新计算。尽管这一变化在本例中并不重要,但是在很多场合中,这种变化会导致寻路结果的巨大变化。
那么我们怎么样去确定实际路径呢?很简单,从终点开始,按着箭头向父节点移动,这样你就被带回到了起点,这就是你的路径。如下图所示。从起点 A 移动到终点 B 就是简单从路径上的一个方格的中心移动到另一个方格的中心,直至目标。就是这么简单!
![]()
图 7
1.5A*算法总结(Summary of the A* Method)
Ok ,现在你已经看完了整个的介绍,现在我们把所有步骤放在一起:
1. 把起点加入 open list 。
2. 重复如下过程:
a. 遍历 open list ,查找 F 值最小的节点,把它作为当前要处理的节点。
b. 把这个节点移到 close list 。
c. 对当前方格的 8 个相邻方格的每一个方格?
◆ 如果它是不可抵达的或者它在 close list 中,忽略它。否则,做如下操作。
◆ 如果它不在 open list 中,把它加入 open list ,并且把当前方格设置为它的父亲,记录该方格的 F , G 和 H 值。
◆ 如果它已经在 open list 中,检查这条路径 ( 即经由当前方格到达它那里 ) 是否更好,用 G 值作参考。更小的 G 值表示这是更好的路径。如果是这样,把它的父亲设置为当前方格,并重新计算它的 G 和 F 值。如果你的 open list 是按 F 值排序的话,改变后你可能需要重新排序。
d. 停止,当你
◆ 把终点加入到了 open list 中,此时路径已经找到了,或者
◆ 查找终点失败,并且 open list 是空的,此时没有路径。
3. 保存路径。从终点开始,每个方格沿着父节点移动直至起点,这就是你的路径
二、代码演示
%% 栅格地图有障碍两边的对角线不能通行,基于A星算法实现栅格路径规划
clear;
clc
close all
G= [0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 1 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 1 1 1 0 0 1 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 1 0 1 1 0 0 0 0 0 0;
0 1 1 1 0 0 0 0 0 0 1 0 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 1 1 1 1 0 0 0 0 0 0;
0 0 0 0 0 0 0 1 1 0 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 1 1 1 0 1 1 1 1 0;
0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0 0 0 0 0;
0 0 1 1 0 0 0 0 0 0 1 1 1 1 1 1 1 1 1 0;
0 0 1 1 0 0 1 1 1 0 1 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 1 1 1 0 1 0 0 0 0 0 0 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 1 1 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 1 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0];
ditu.qishi=[1,1];%起点
ditu.mubiao=[20,20];%终点
ditu.daxiao=20;%地图栅格数量
zhangai=[];
for i=1:ditu.daxiao
for j=1:ditu.daxiao
if (G(i,j)==1)
zhangai=[zhangai;j,i];%障碍位置
end
end
end
path=Astar(zhangai,ditu);%通过A星算法求解最短路径
b = G;
b(end+1,end+1) = 0;
figure(4);
title('基于A星算法实现栅格路径规划,完整代码或者仿真咨询qq1575304183,有障碍两边的对角线不能通行')
colormap([1 1 1;0 0 0]); % 创建颜色
pcolor(0.5:size(G,2) + 0.5, 0.5:size(G,1) + 0.5, b); % 赋予栅格颜色
set(gca, 'XTick', 1:size(G,1), 'YTick', 1:size(G,2)); % 设置坐标
axis image xy; % 沿每个坐标轴使用相同的数据单位,保持一致
hold on;
plot(path(:,1),path(:,2),'-m','linewidth',2);
a=path(1,3);
三、仿真结果




