- 1【软件分享】微信防撤回v3.9.8.25_微信3.9.8.25版本
- 2使用向量数据库pinecone构建应用02:检索增强生成RAG_pinecone向量数据库
- 3Android 14.0 添加自定义服务,并生成jar给第三方app调用_android14 添加service
- 4CSRF防御方案_csrf防护
- 5【数据结构】—从冒泡排序丝滑过度快速排序(含C语言实现)
- 6相对导入和绝对导入_python中绝对导入
- 7SRC漏洞挖掘技巧(0基础入门到精通),只要收藏这一篇就够了!!_peiqi wiki-poc
- 8腾讯云4核8G服务器多少钱?4核8G能干啥?
- 9斯坦福四足机器人运动学逆解_四足机器人正逆解算法
- 10小米如何跳转至应用详情页面?_小米因服务升级旧版应用详情页已停止使用
树莓派 4B 多串口配置_树莓派4b串口通信
赞
踩
0. 实验准备以及原理
0.1 实验准备
安装树莓派官方系统的树莓派 4B,有 python 环境,安装了 serial 库
杜邦线若干
屏幕或者可以使用 VNC 进入到树莓派的图形界面
0.2 原理
树莓派 4B 有 UART0(PL011)、UART1(mini UART)和 4 个 PL011 串口共计有 6 个 UART
1. 硬件串口配置
可以将硬件串口(例如 /dev/ttyAMA0)配置为普通的串口设备,以便与其他设备进行串口通信
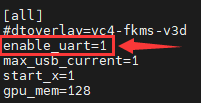
确保树莓派的引脚上的串口功能没有被占用。默认情况下,树莓派的 GPIO 引脚会使用串口功能。可以通过编辑 /boot/config.txt 文件来禁用串口功能。在文件的末尾添加或修改以下行,保存文件后重启树莓派(可以使用vi来编辑此文件,vi 的使用可以查看这一篇文章):
enable_uart=1
- 1
在终端中运行以下命令可以确认驱动是否已经加载:
ls -l /dev/ttyAMA0
- 1
能看到下面的输出就代表驱动是正常的

默认情况下,树莓派会将 /dev/ttyAMA0 用作终端串口,而不是普通的串口设备。可以通过编辑 /boot/cmdline.txt 文件来禁用终端串口。找到以 console=serial0 开头的行,并将其修改为 console=tty1,如下图所示

确保你的用户被添加到 dialout 组中,以便具有串口访问权限。运行以下命令将当前用户添加到 dialout 组:
sudo usermod -a -G dialout $USER
- 1
在添加到 dialout 组后,需要注销并重新登录才能使更改生效,到这里硬件串口就配置完成了,不需要看其他的可以直接跳到最后一节进行验证
2. 其他串口配置
2.1 展示所有串口命令
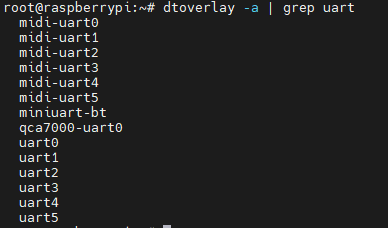
输出下面的命令可以看到所有的串口
dtoverlay -a | grep uart
- 1
2.2 查看特定串口信息
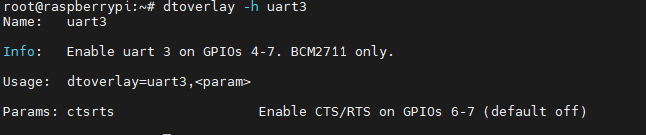
使用下面的命令会展示串口的配置信息
dtoverlay -h uart3
- 1
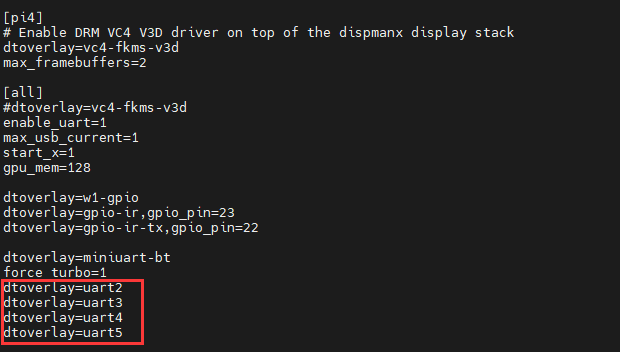
2.3 配置开启串口 UART2-5
在/boot/config.txt的末尾添加如下的代码,保存重启树莓派
dtoverlay=uart2
dtoverlay=uart3
dtoverlay=uart4
dtoverlay=uart5
- 1
- 2
- 3
- 4
查看是否生效
ls /dev/ttyAMA*
- 1
结果如下图

到这里就打开了所有的串口了
3. 验证结果
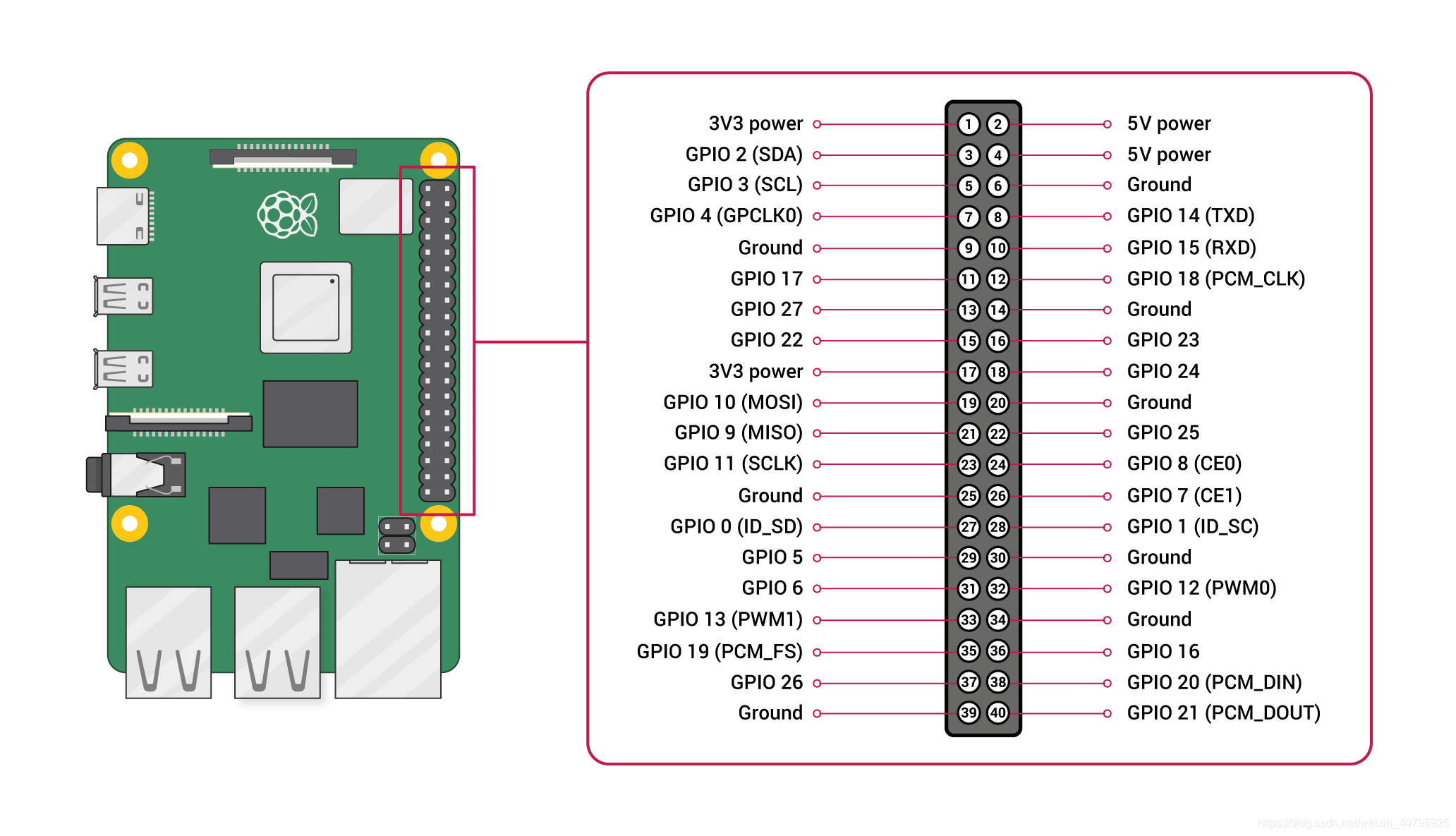
各 UART 串口与 GPIO 对应关系:
GPIO14 = TXD0 -> ttyAMA0
GPIO0 = TXD2 -> ttyAMA1
GPIO4 = TXD3 -> ttyAMA2
GPIO8 = TXD4 -> ttyAMA3
GPIO12 = TXD5 -> ttyAMA4
GPIO15 = RXD0 -> ttyAMA0
GPIO1 = RXD2 -> ttyAMA1
GPIO5 = RXD3 -> ttyAMA2
GPIO9 = RXD4 -> ttyAMA3
GPIO13 = RXD5 -> ttyAMA4
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
这里进行两个验证:UART2的自环测试,UART2和3的串口间通信,以及一个究极测试:同时打开所有的串口(包括USB转的,看看树莓派的CPU使用率有多少)
3.1 UART2的自环测试
杜邦线短接 GPIO4 和 GPIO5
编写下面的 python 程序
import serial
ser1 = serial.Serial(port='/dev/ttyAMA2',baudrate=115200)
ser1.write(b'Hello, World!\n')
data = ser1.readline()
print(data)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
执行结果如下图

3.2 UART2和3的串口间通信
使用杜邦线按照下图的方式进行连接
GPIO4(TXD3)-------GPIO9(RXD2)
GPIO5(RXD3)-------GPIO8(TXD2)
- 1
- 2
然后编写如下的程序
import serial
ser2 = serial.Serial(port='/dev/ttyAMA2',baudrate=115200)
ser3 = serial.Serial(port='/dev/ttyAMA3',baudrate=115200)
ser2.write(b'hello ser3,I am ser2\n')
ser3.write(b'hello ser2,I am ser3\n')
line2 = ser2.readline()
line3 = ser3.readline()
print('ser2Rec:'+str(line2))
print('ser3Rec:'+str(line3))
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
结果如下图,说明串口生效,实验成功:

3.3 究极测试
同时打开 USB0、USB1 和 ttyAMA0 到 ttyAMA4 一共 7 个串口,发送数据的同时存储数据,查看一下 CPU 的使用率
我的配置为:
USB0、1 使用 UART 转 TTL 模块,使用电脑发送数据过来
ttyAMA0 作为硬件串口,然后改为的通用串口,也使用 UART 转 TTL 模块,电脑发送数据过来
ttyAMA1 和 ttyAMA4 连接
ttyAMA2 和 ttyAMA3 连接
对应的连接图可以参考上面的GPIO对照着连线
代码如下
import serial import time import threading import sys READ = 1 READTIME = 600 ser0 = serial.Serial(port='/dev/ttyAMA0',baudrate=115200) ser1 = serial.Serial(port='/dev/ttyAMA1',baudrate=115200) ser2 = serial.Serial(port='/dev/ttyAMA2',baudrate=115200) ser3 = serial.Serial(port='/dev/ttyAMA3',baudrate=115200) ser4 = serial.Serial(port='/dev/ttyAMA4',baudrate=115200) serUSB0 = serial.Serial(port='/dev/ttyUSB0',baudrate=115200) serUSB1 = serial.Serial(port='/dev/ttyUSB1',baudrate=115200) def WriteSer1(): global READ while(READ): ser1.write(b'I am ser1') def WriteSer2(): global READ while(READ): ser2.write(b'I am ser2') def WriteSer3(): global READ while(READ): ser3.write(b'I am ser3') def WriteSer4(): global READ while(READ): ser4.write(b'I am ser4') def ReadSer0(): ser0.write(bytearray([0xaa,0x0a])) global READ data0 = b'' while(READ): if(ser0.in_waiting): data0 += ser0.read(ser0.in_waiting) f = open('ser0.bin','ab') f.write(data0) f.close() def ReadSer1(): global READ data1 = b'' while(READ): if(ser1.in_waiting): data1 += ser1.read(ser1.in_waiting) f = open('ser1.bin','ab') f.write(data1) f.close() def ReadSer2(): global READ data2 = b'' while(READ): if(ser2.in_waiting): data2 += ser2.read(ser2.in_waiting) f = open('ser2.bin','ab') f.write(data2) f.close() def ReadSer3(): global READ data3 = b'' while(READ): if(ser3.in_waiting): data3 += ser3.read(ser3.in_waiting) f = open('ser3.bin','ab') f.write(data3) f.close() def ReadSer4(): global READ data4 = b'' while(READ): if(ser4.in_waiting): data4 += ser4.read(ser4.in_waiting) f = open('ser4.bin','ab') f.write(data4) f.close() def ReadSerUSB0(): global READ dataUSB0 = b'' while(READ): if(serUSB0.in_waiting): dataUSB0 += serUSB0.read(serUSB0.in_waiting) f = open('serUSB0.bin','ab') f.write(dataUSB0) f.close() def ReadSerUSB1(): global READ dataUSB1 = b'' while(READ): if(serUSB1.in_waiting): dataUSB1 += serUSB1.read(serUSB1.in_waiting) f = open('serUSB1.bin','ab') f.write(dataUSB1) f.close() #%% def start(): global READ timeStart = time.time() ser1Write_thread = threading.Thread(target=WriteSer1) ser2Write_thread = threading.Thread(target=WriteSer2) ser3Write_thread = threading.Thread(target=WriteSer3) ser4Write_thread = threading.Thread(target=WriteSer4) ser0_thread = threading.Thread(target=ReadSer0) ser1_thread = threading.Thread(target=ReadSer1) ser2_thread = threading.Thread(target=ReadSer2) ser3_thread = threading.Thread(target=ReadSer3) ser4_thread = threading.Thread(target=ReadSer4) serUSB0_thread = threading.Thread(target=ReadSerUSB0) serUSB1_thread = threading.Thread(target=ReadSerUSB1) ser1Write_thread.start() ser2Write_thread.start() ser3Write_thread.start() ser4Write_thread.start() ser0_thread.start() ser1_thread.start() ser2_thread.start() ser3_thread.start() ser4_thread.start() serUSB0_thread.start() serUSB1_thread.start() time.sleep(READTIME) READ = False print('test time'+str(time.time()-timeStart)) sys.exit() if __name__ == '__main__': start()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
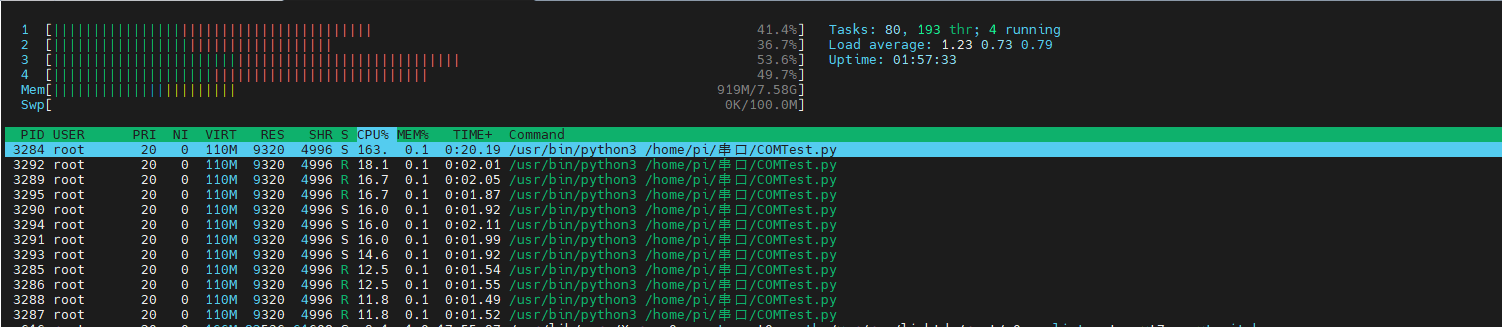
使用命令,来查看当前CPU的使用率
htop
- 1
可以发现即使跑了这么多的串口,树莓派的 CPU 使用率依旧不算很高,4 核差不多都在 40% 的利用率左右