
热门标签
热门文章
- 1基于VITA57.4标准的单通道6GSPS 12位采样ADC,单通道 6GSPS 16位采样DAC子卡模块_1.采样率:6gsps 2.采样精度:12bit; 3.实时带宽:500mhz; 4.耦合方式:ac
- 2Transformer模型-数据预处理,训练,推理(预测)的简明介绍_transformer部署 训练 推理
- 3某个网站(比如CSDN、GitHub)突然打开、加载很慢,有些途径访问正常、其他网站访问正常,可尝试指定域名服务器的IP地址,不走DNS查询。_csdn太卡
- 4xtrabackup备份还原_percona xtrabackup windows
- 5NLP最新趋势,7个主流业务场景!
- 6Redis scan命令 基本使用
- 7前端Web怎么插图:深入解析与实用技巧
- 8数据迁移一致性测试探索与实践_数据迁移验证一致性方法
- 9ARM32开发——LED点灯
- 10【夜深人静学数据结构与算法 | 第一篇】KMP算法_已知,模式字符串为aabacfb 在kmp中,前缀表是
当前位置: article > 正文
在ros2中使用gazebo仿真Solidworks导出urdf教程_ros2将sw转为
作者:我家自动化 | 2024-06-04 12:31:06
赞
踩
ros2将sw转为
1.前言
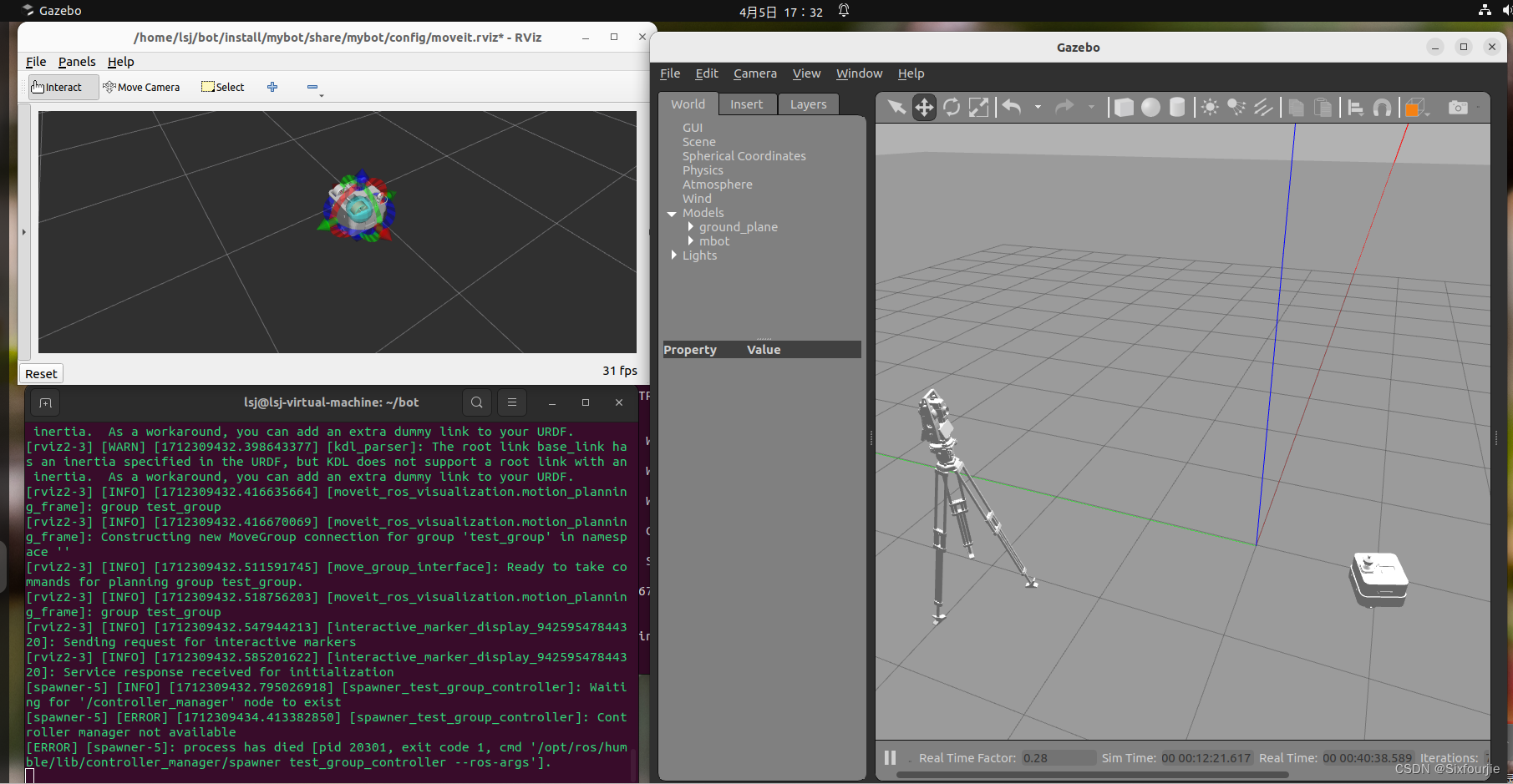
本人目前初学ros2,最近在实践ros2中的gazebo仿真,入门跟着鱼香ros老师和古月居老师来学习相关的知识,在gazebo仿真环节,发现教程里基本都是采用自写urdf来生成几何图像(圆柱、立方体)来组成简单的机器人,因此在后期仿真的真实性带来了一定的局限性,因此我最近在研究如何在ros2中成功的将Solidworks生成的urdf模型导入到gazebo中打开。
在本文主要介绍在实践过程中遇到的问题,解决办法,以及整个流程,希望对大家有所帮助!
2.从Solidworks生成urdf模型
本节不过多讲解如何在Solidworks生成urdf模型,详细的可以参考以下我搜索到的文章生成urdf
这是生成的模型的完整的文件夹:
主要检查你的meshes文件夹是否包含了你所有的零件。
3.准备工作:urdf进入ros2中
拿到从SolidWork导出的urdf、meshes文件夹后,建立一个软件包,首先新建一个空白文件夹

我这里的文件夹名字为robot,随后新建一个src的文件夹,在此文件夹下新建一个Python的功能包
ros2 pkg create mybot_description --build-type ament_python
随后将你的生成的模型文件导入进该功能包之中,并且切记一定要更新以下urdf文件里的路径。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/我家自动化/article/detail/671848
推荐阅读
相关标签

