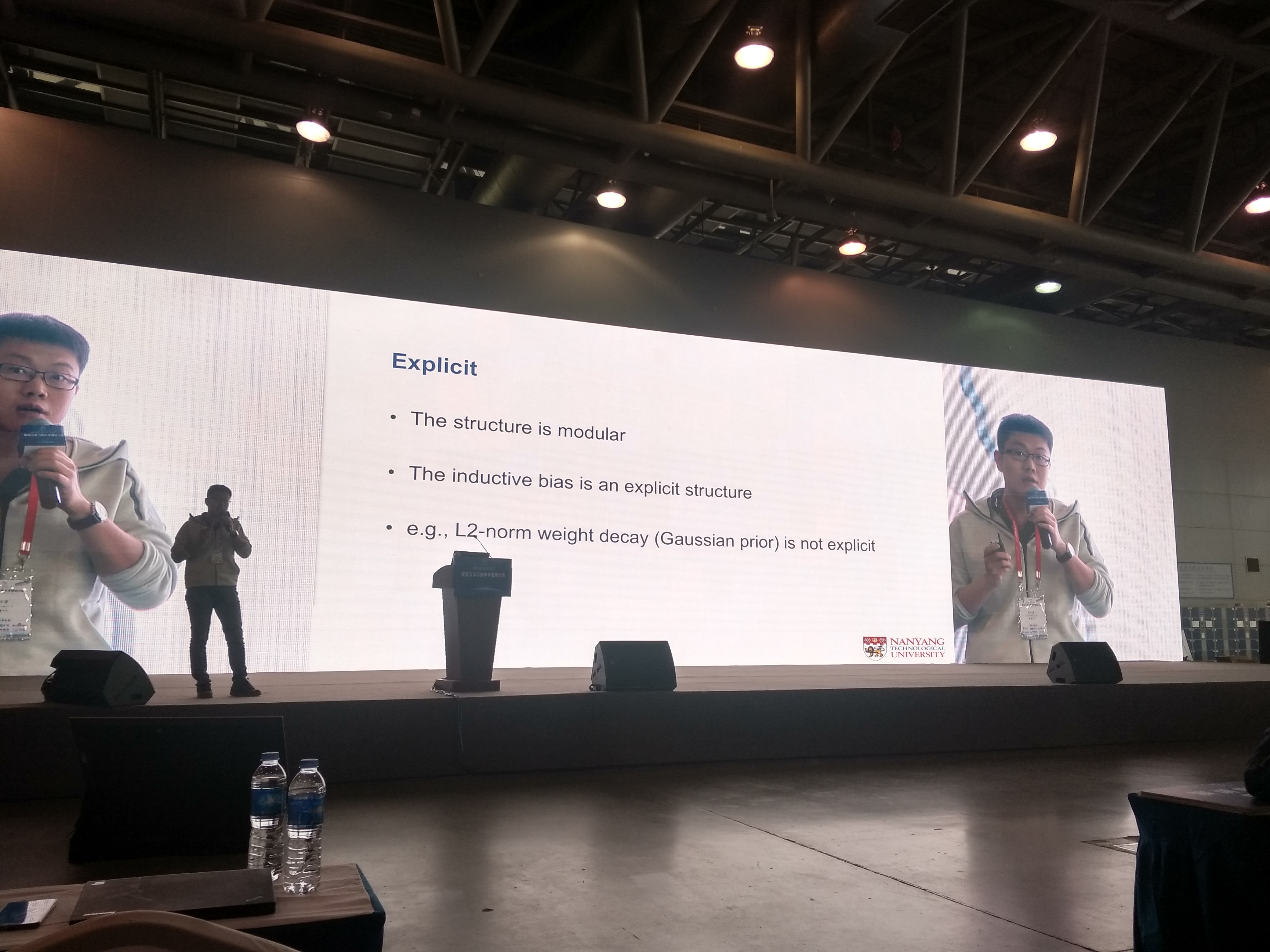
3. 基于视觉和常识的深度推理
- 几乎没啥干货
3.1 视觉场景理解与描述与描述中的物体关系 (shuqiang jiang, CAS)
- VAD中也涉及到对于不同场景的理解,也许对我有用
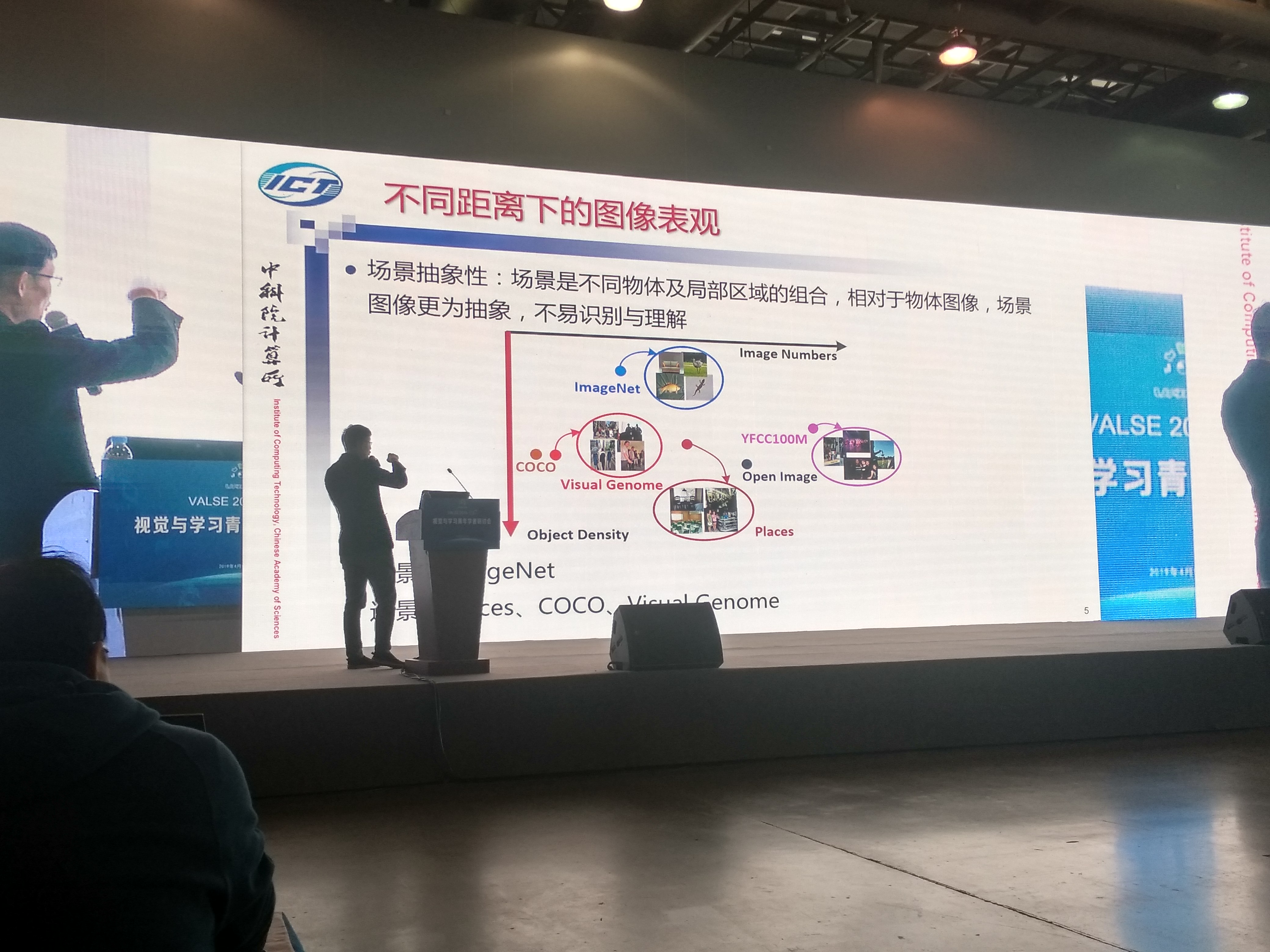
不同距离下的图像表现
- 场景抽象性:场景是由不同物体及局部区域的组合,相比较物体图像,场景图像更加抽象,更难以识别和理解
- 比如:(1)常规:ImageNet (2)复杂:COCO, Visual Genome(有一张图)
视觉场景中的多物体
关于物体
- 核心问题:何为物体?发现物体;理解物体;利用物体;描述物体与场景;
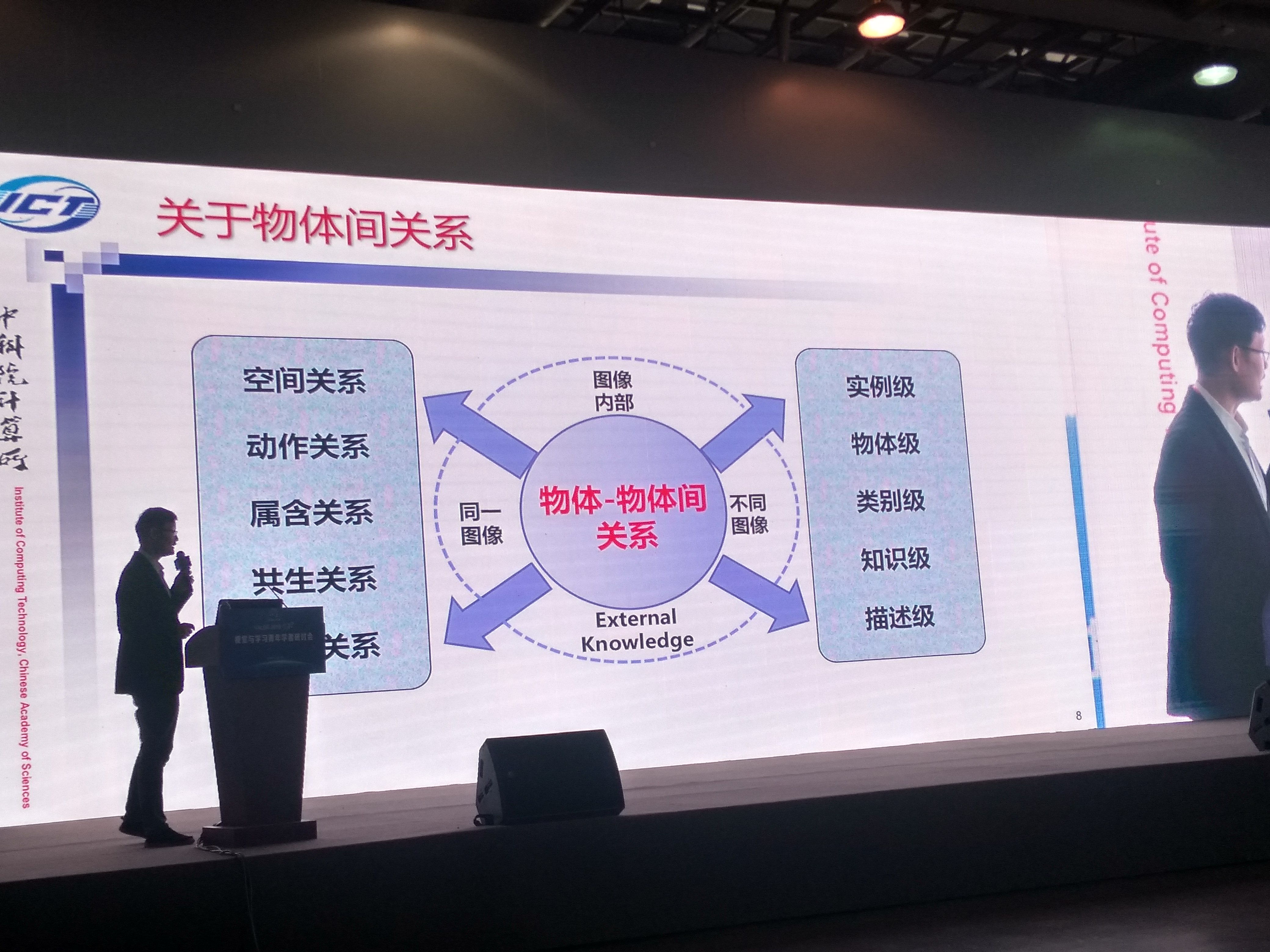
关于物体间关系
- 同一图像:空间关系,动作关系,属含关系,共生关系,xx关系
- 不同图像:物体的层次有:实例级,物体级,类别级,知识级,描述级
四个经典任务:
- 同一图像
- 场景识别:物体间的空间位置关系
- 图像语言描述:物体之间的的上下文关联关系
- 不同图像
- 图像搜索:实例级 partial duplicate (去重?)
- 共同物体检测:不知名的相同物体
- 同一图像
场景:图像中存在的高层概念信息
- 场景识别的潜在应用
- 照片自动管理
- 图像的全面理解
- 挑战与难点
- 场景抽象性
- 类内差异性
- 类内物体分布多样性
- 类间相似性
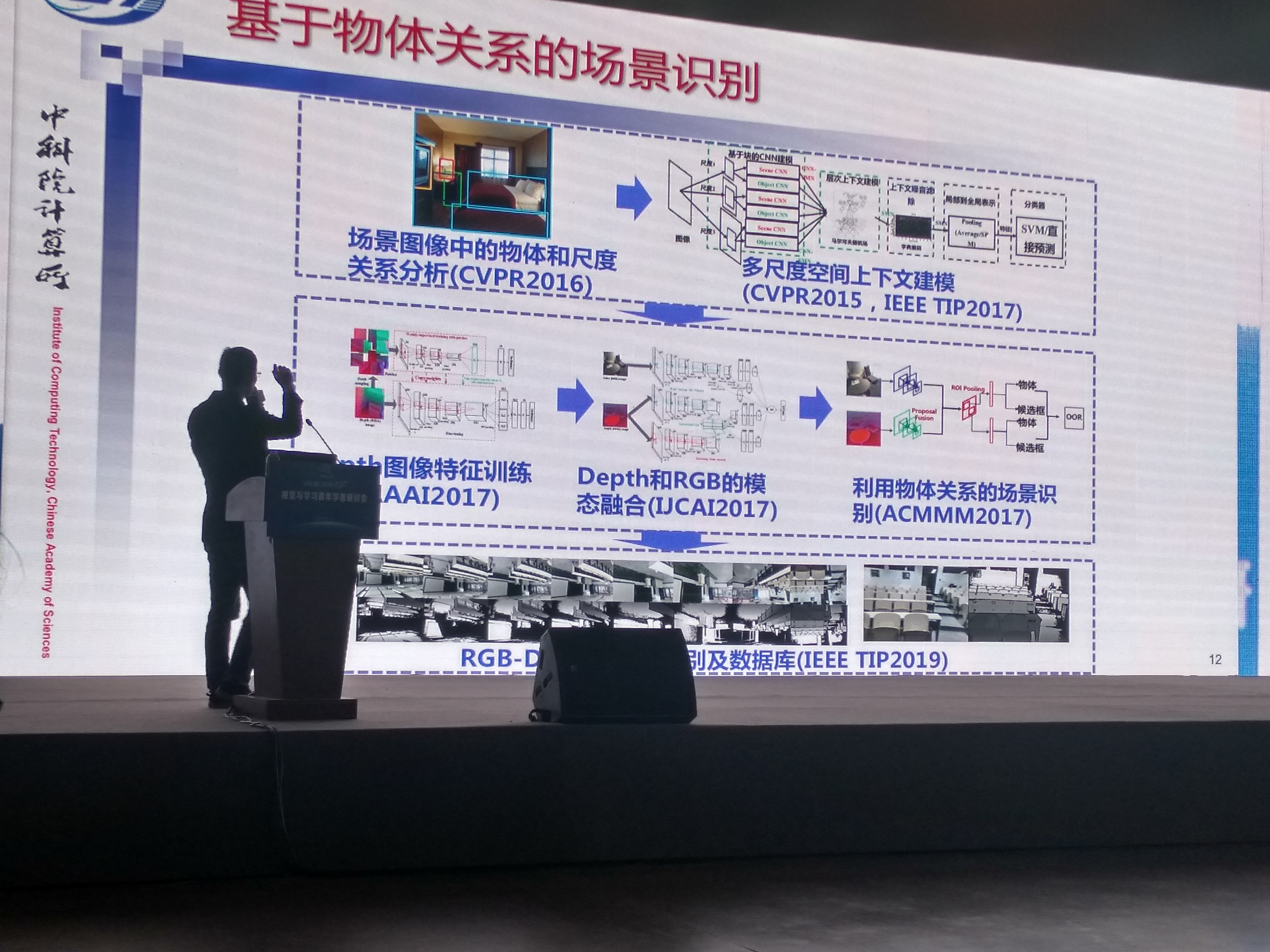
- 作者的一些工作
- 直接贴图,有时间再阅读完善
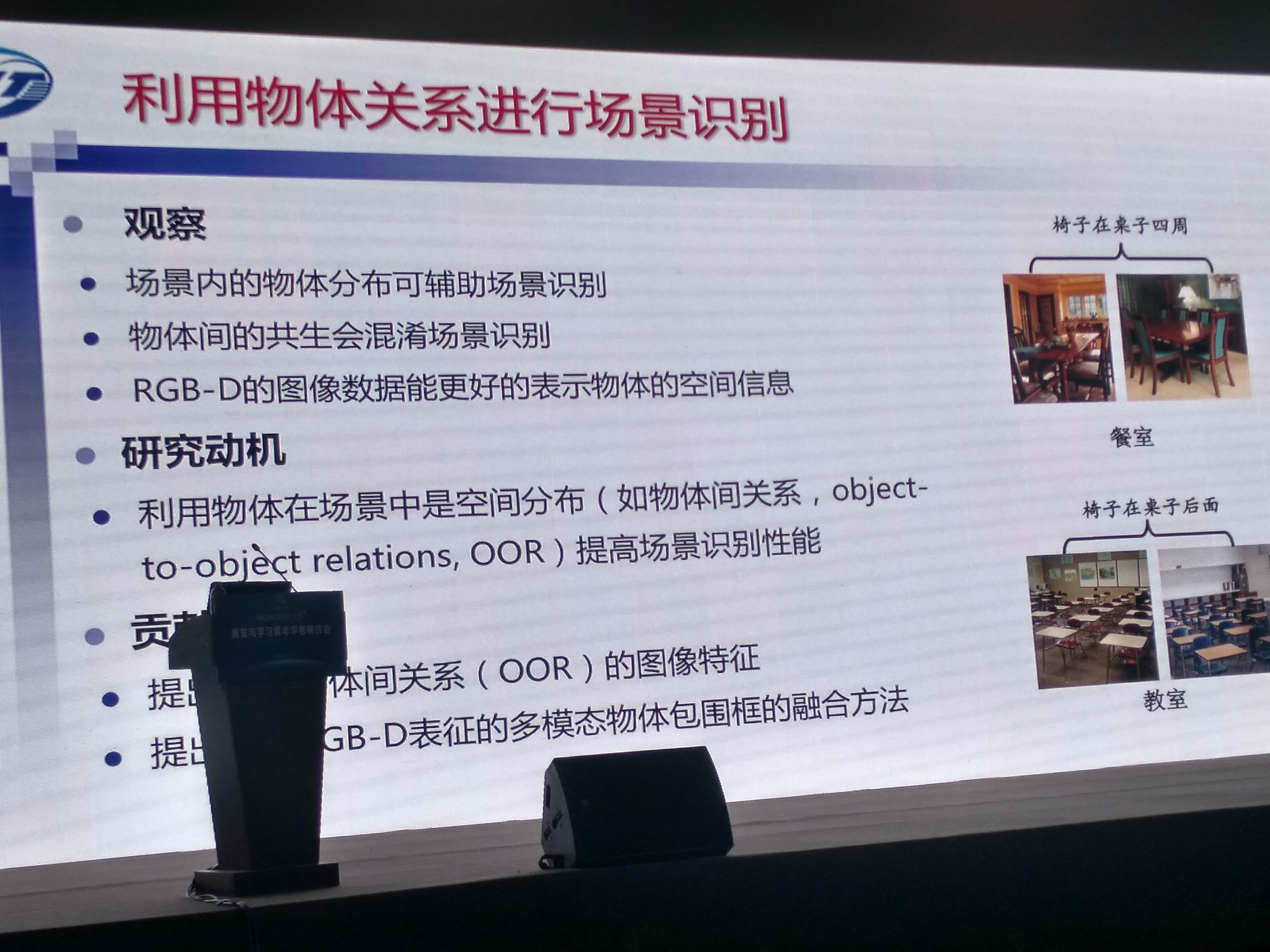
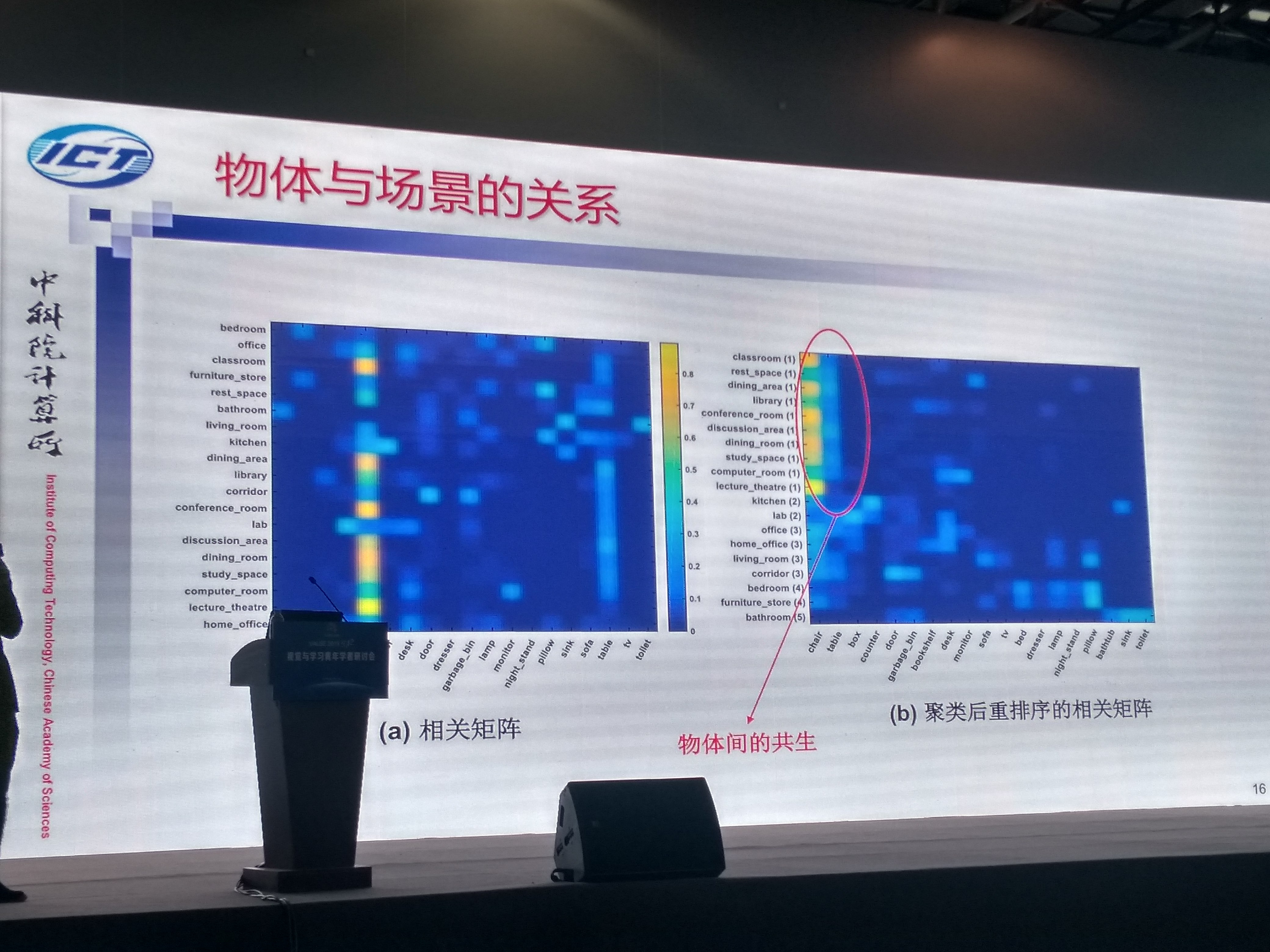
- 一个不错的思想:利用物体关系进行场景识别
- 场景内的物体分布可辅助场景识别(新增OOR module, object-object relations)
- 物体间的共生会混淆场景识别
- RGB-D的图像数据能更好的表示物体的空间信息
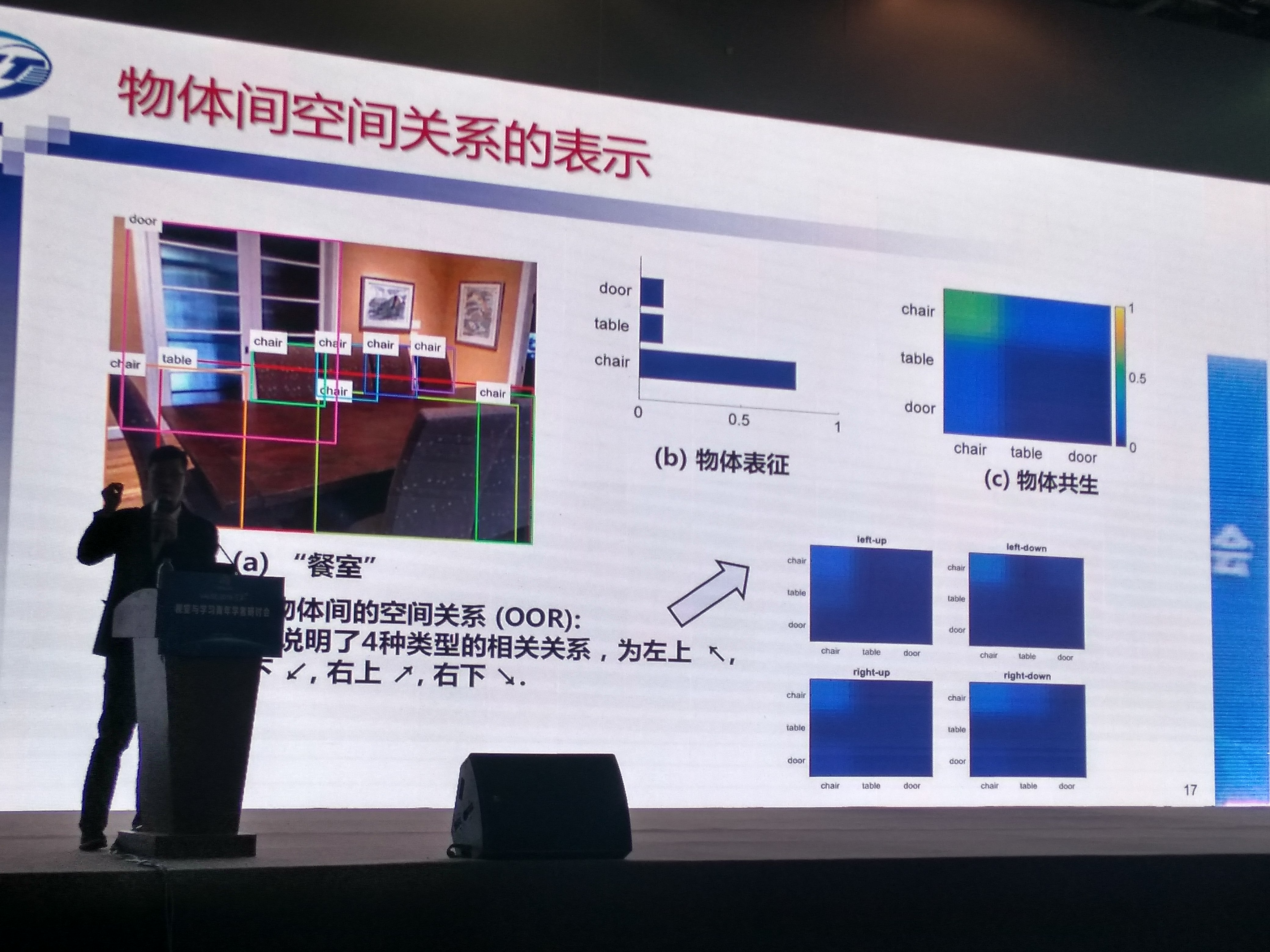
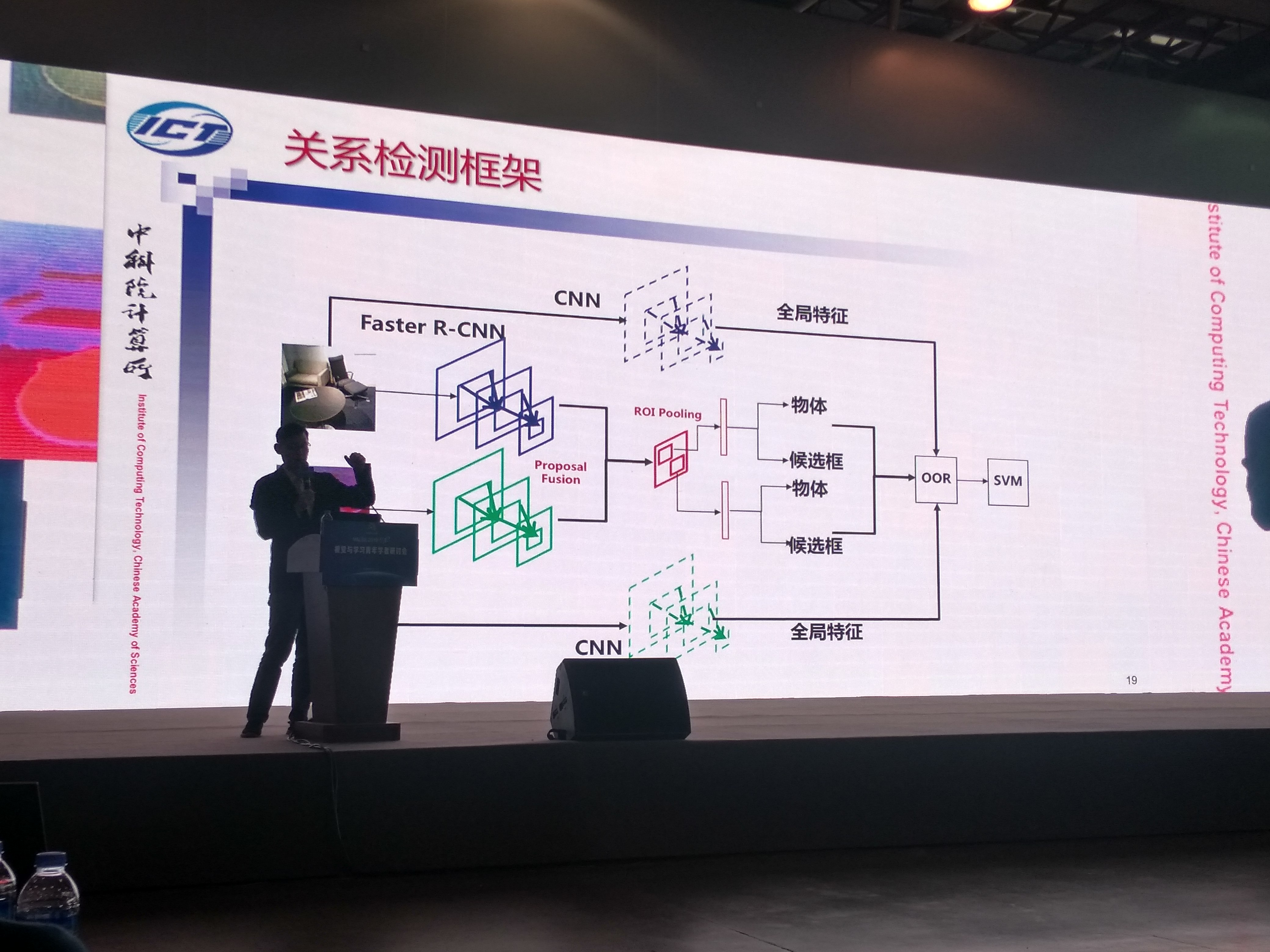
- 基于空间关系建模的场景识别框架
- 多种空间关系定义:物体间方向、距离、尺寸的关系
- 多种空间关系建模:COOR(空间关系特征矩阵建模),SOOR(基于物体与空间关系的图题描述)
- 具体结构见一张图片
- 场景识别的潜在应用
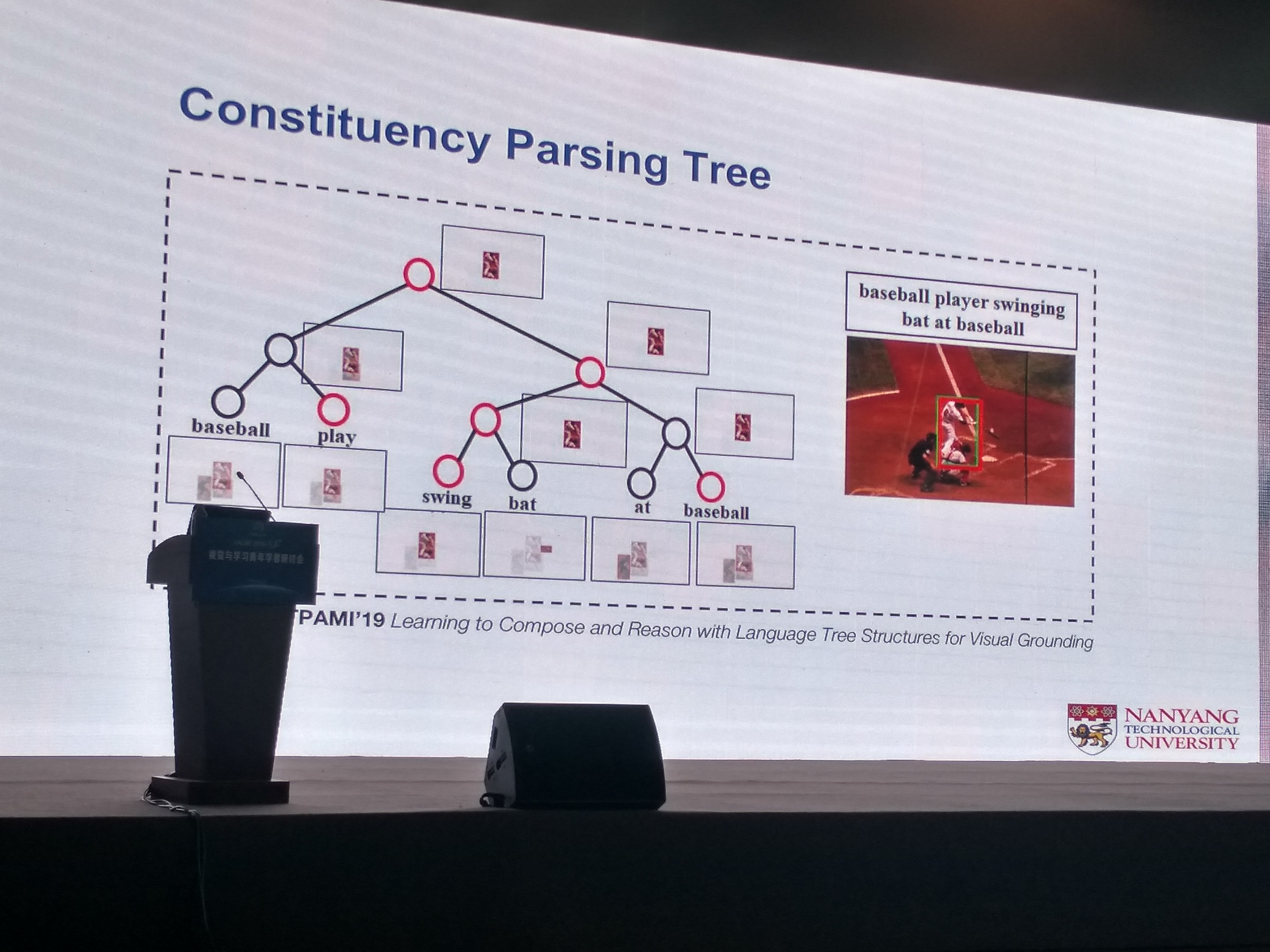
利用物体上下文信息的语言描述
- 图片
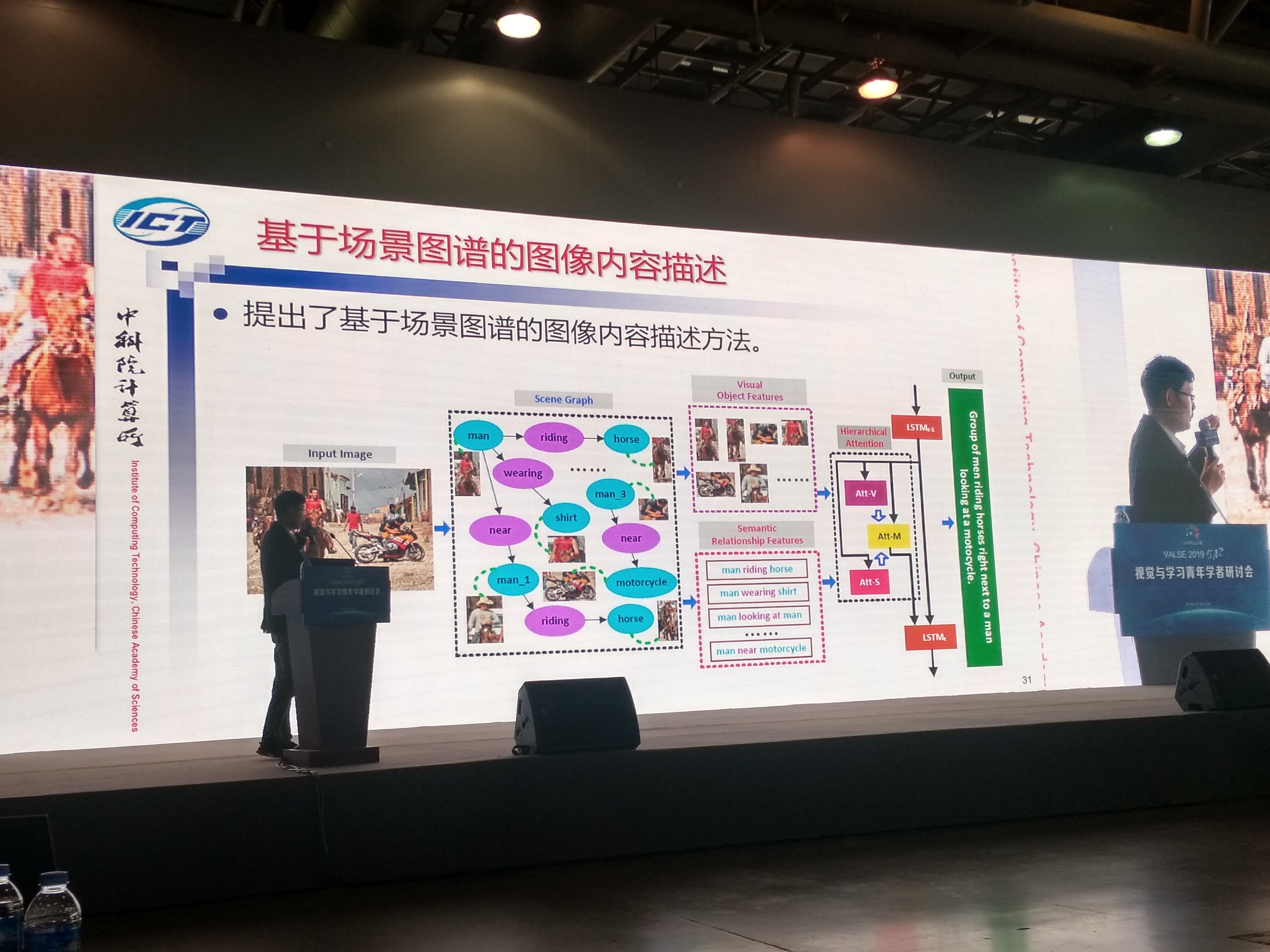
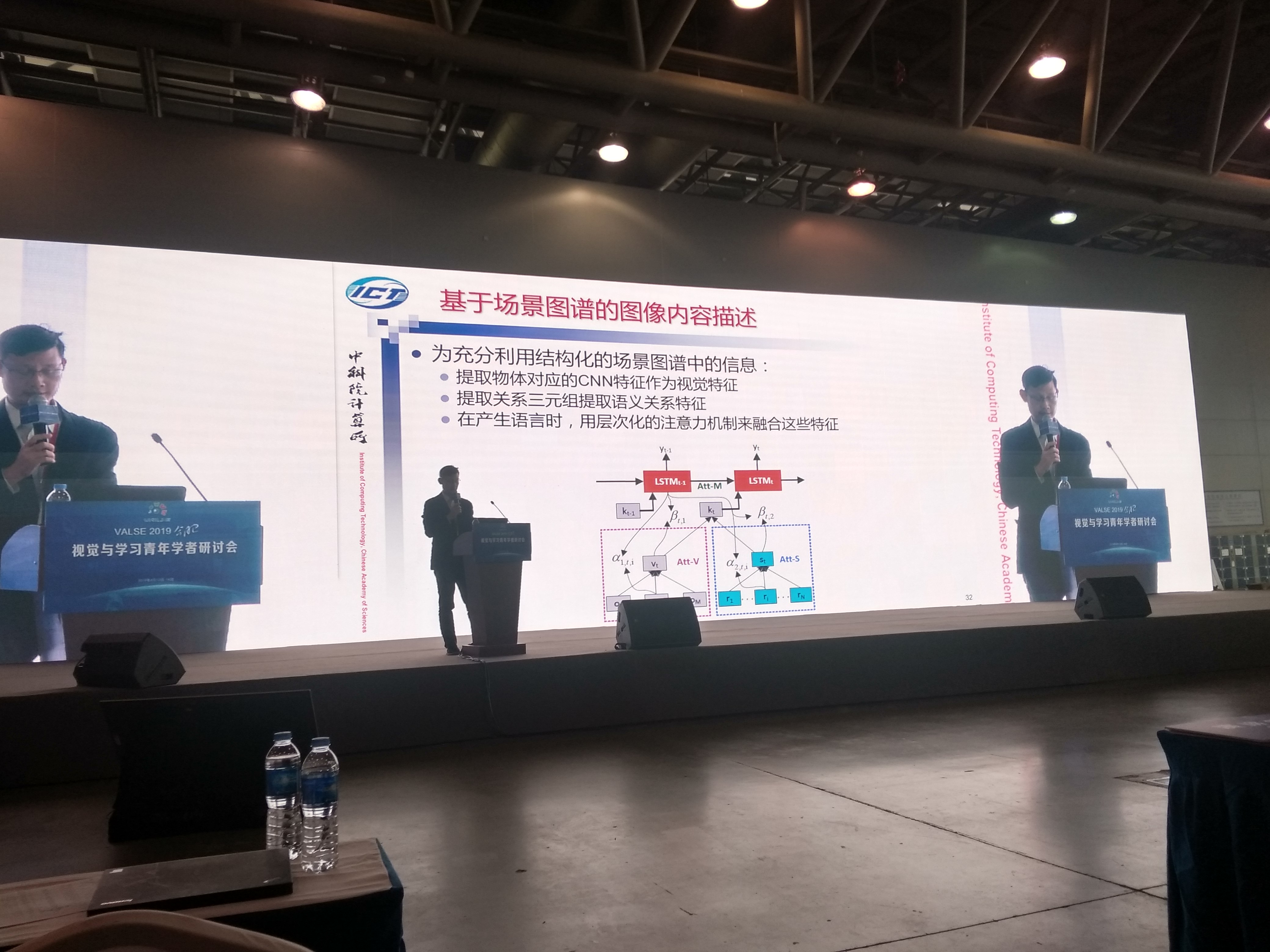
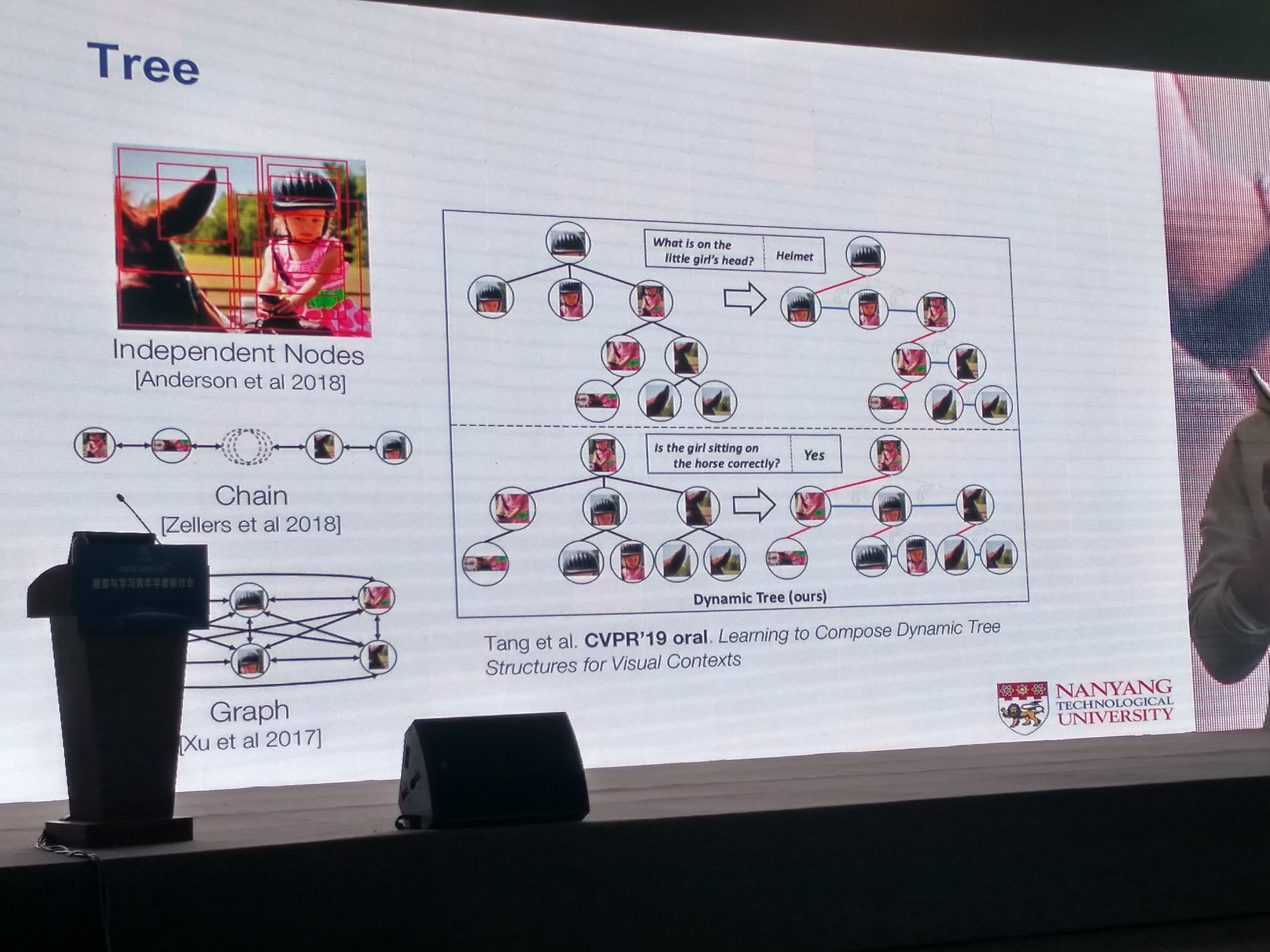
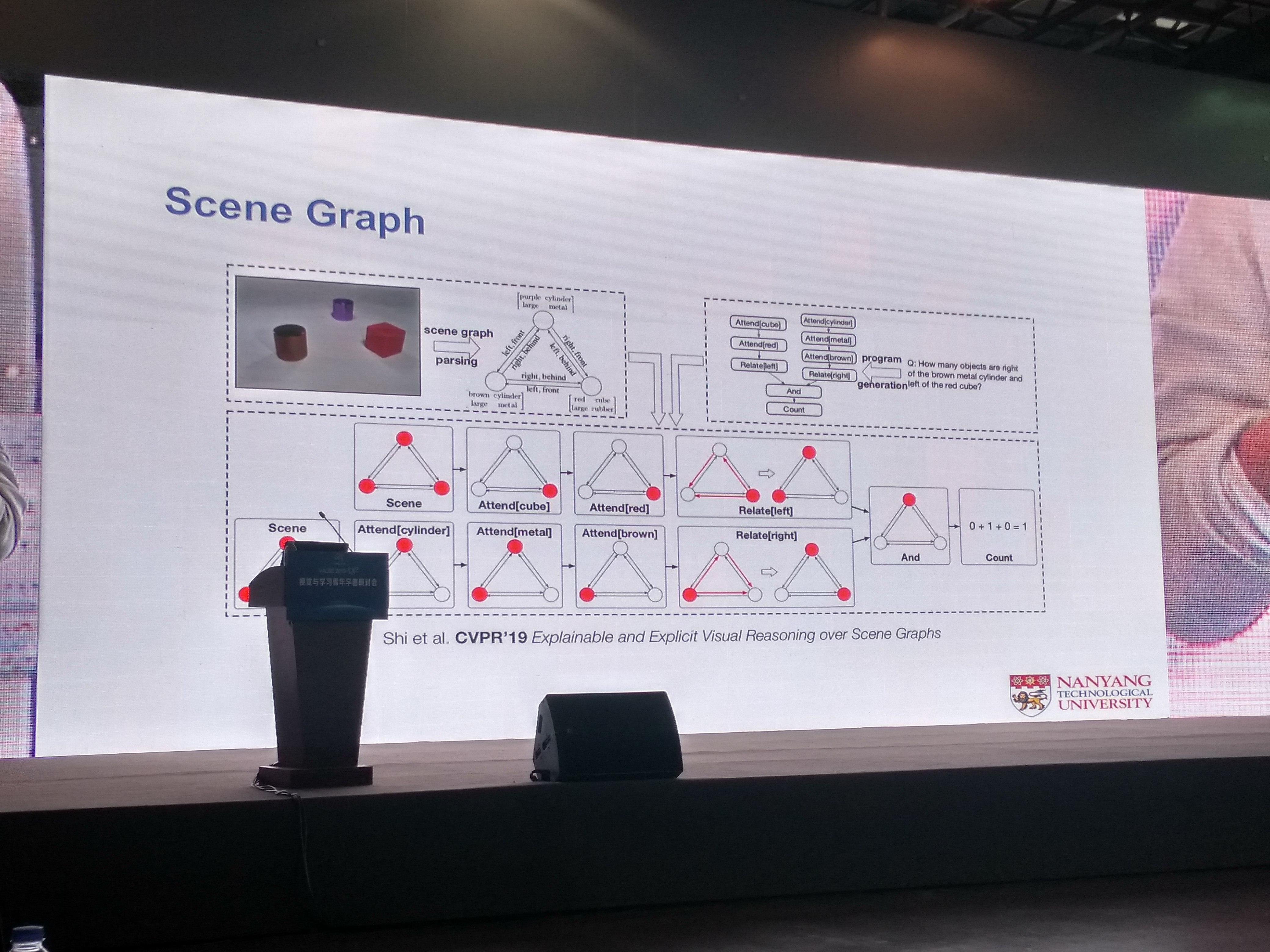
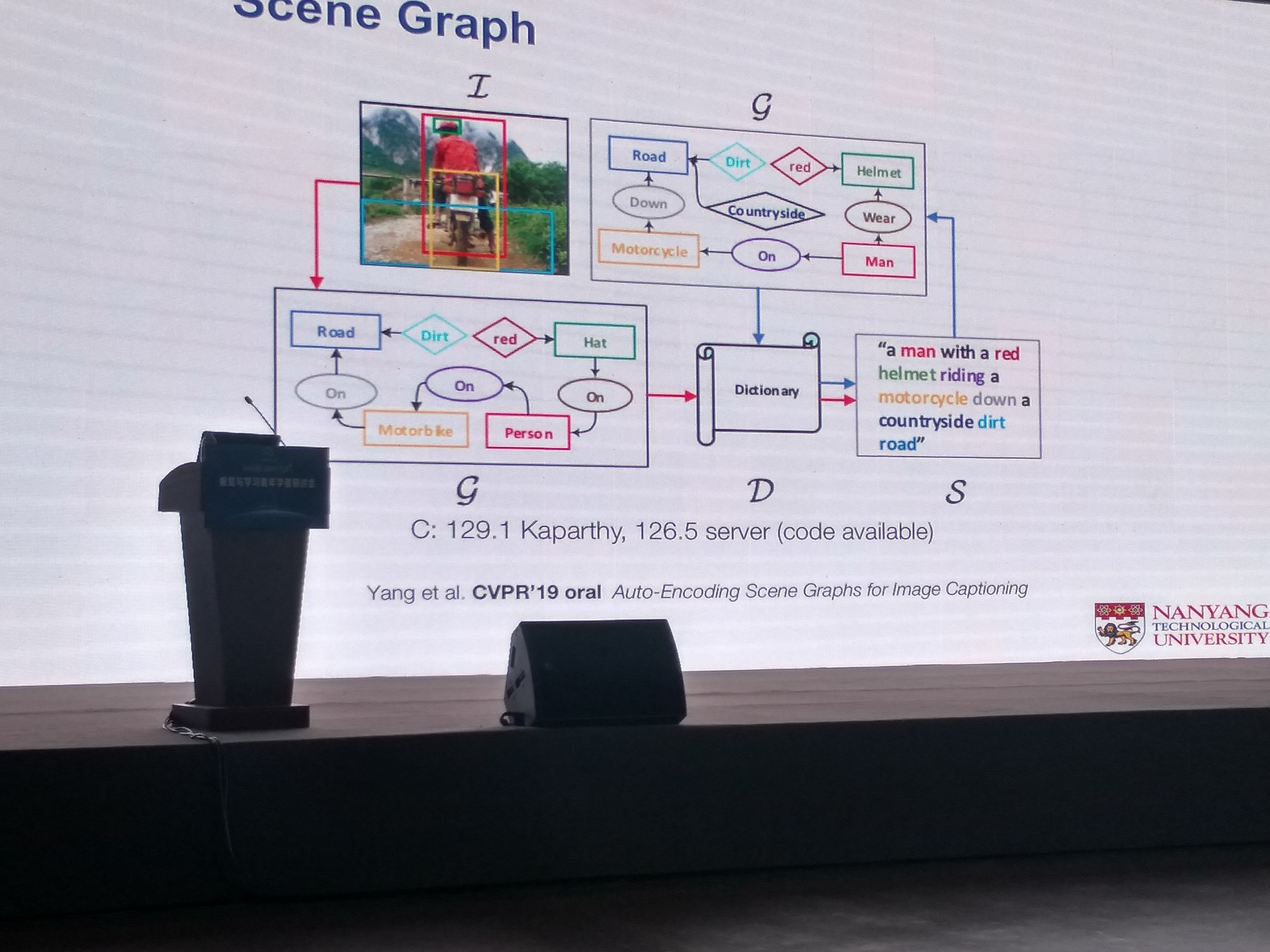
基于场景图谱的图像内容描述
- 图片
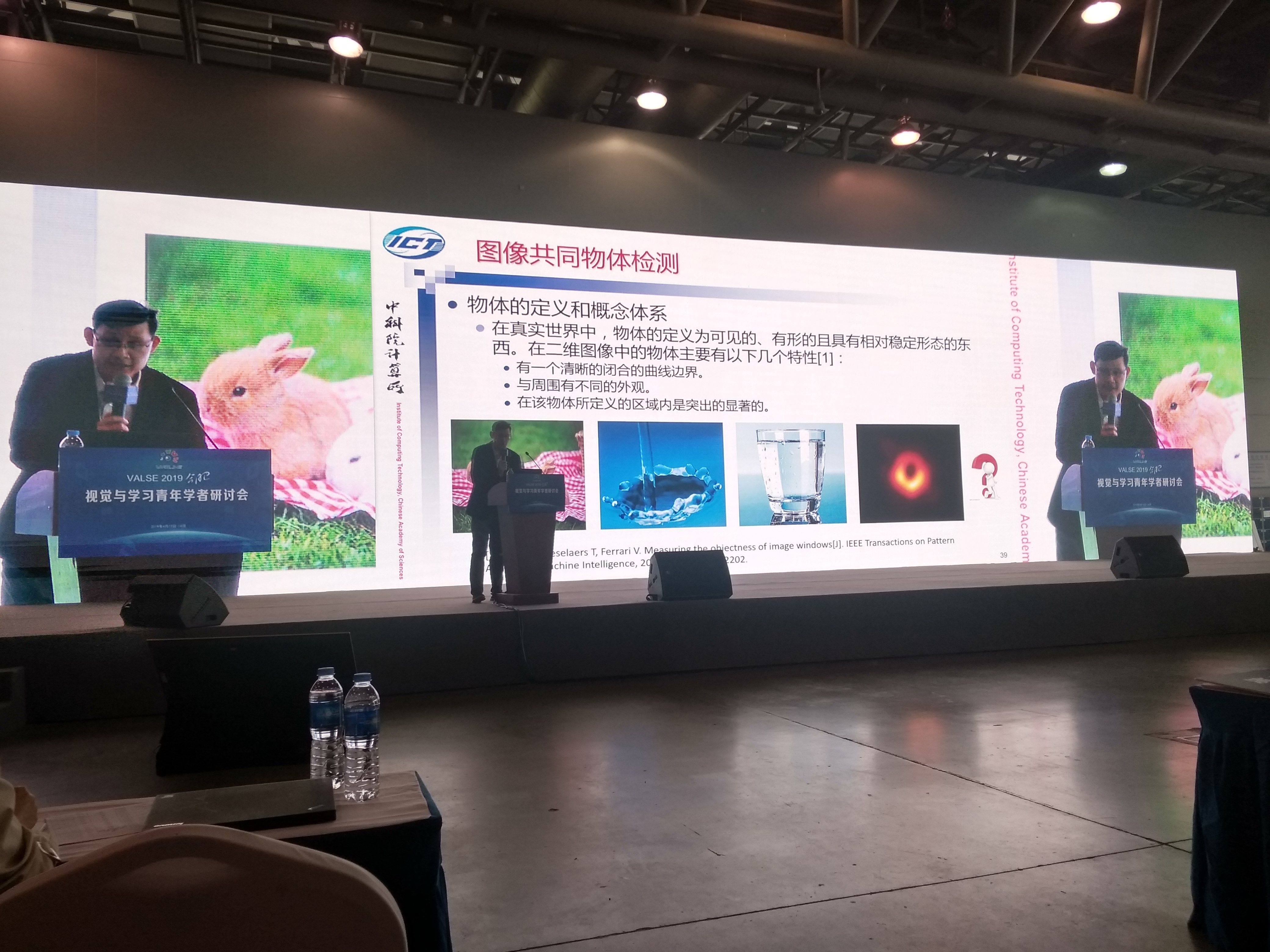
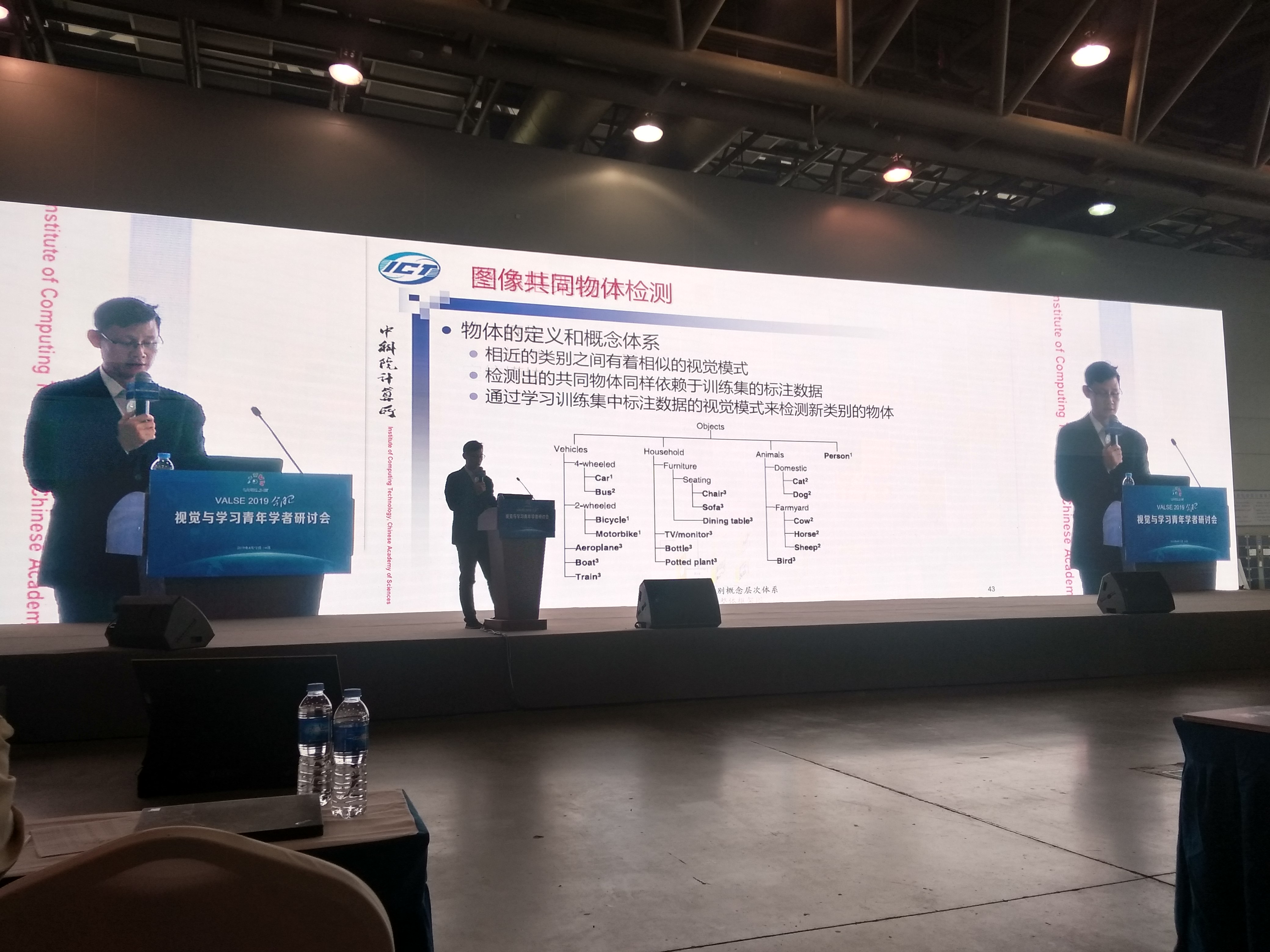
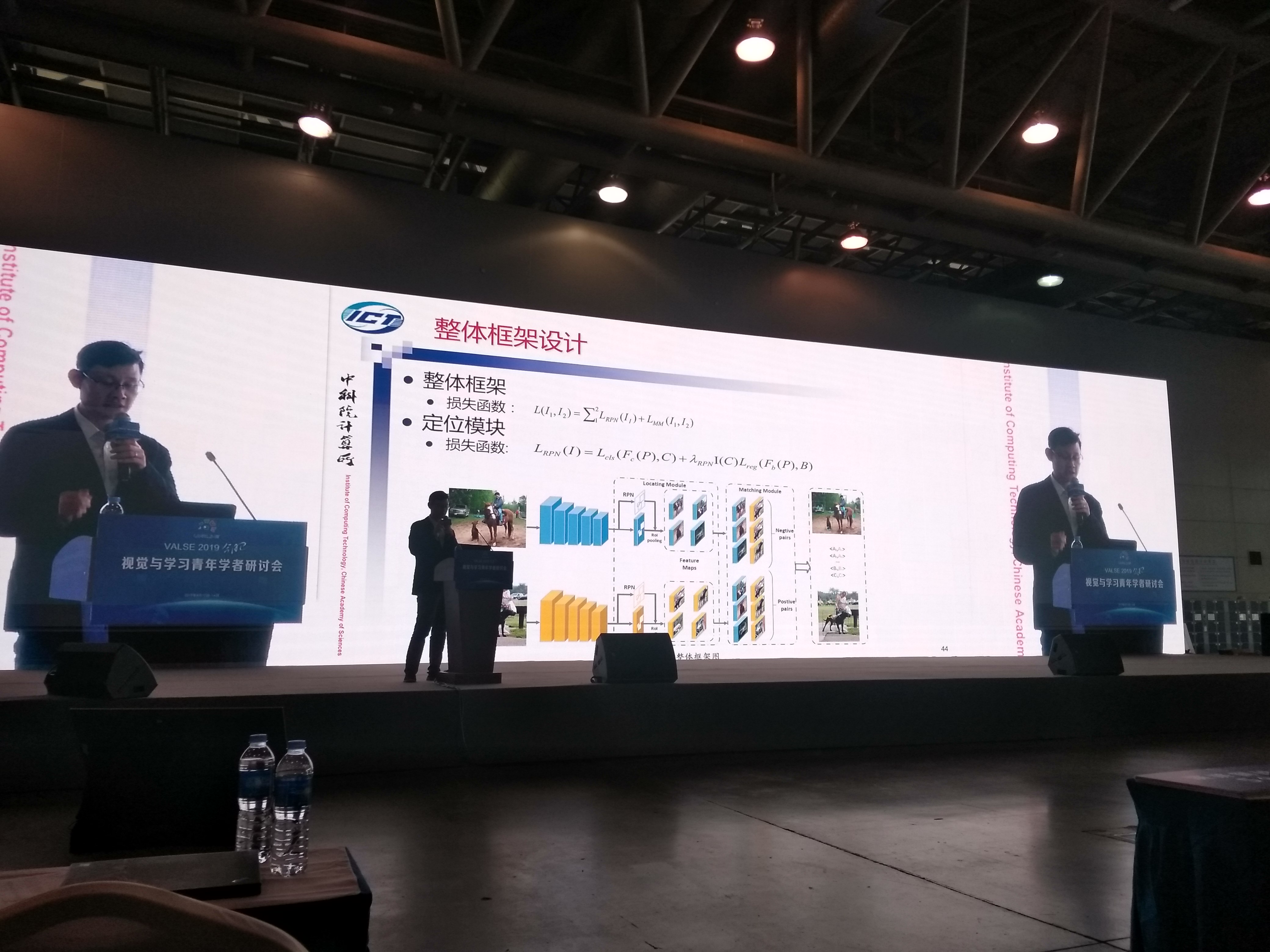
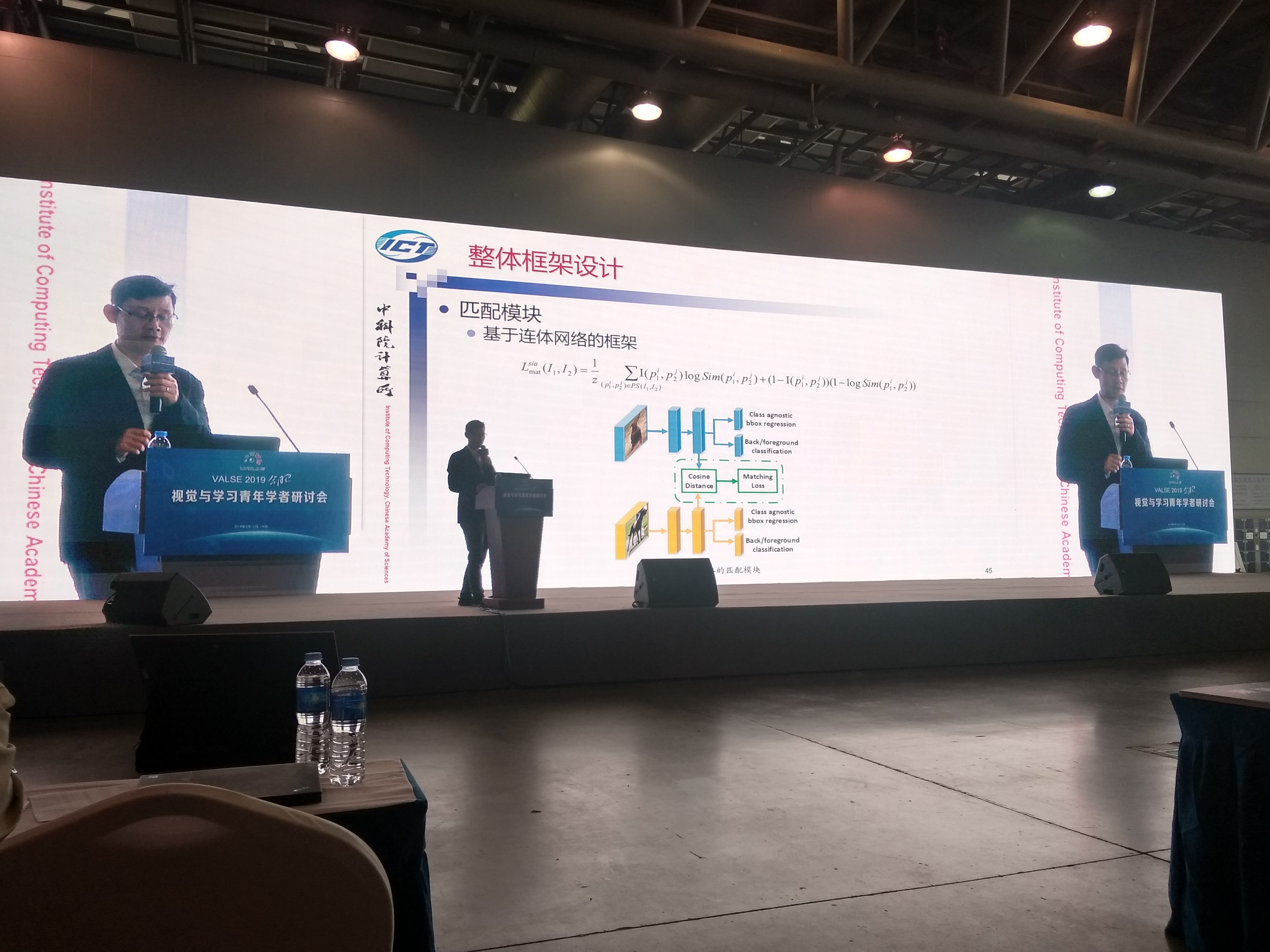
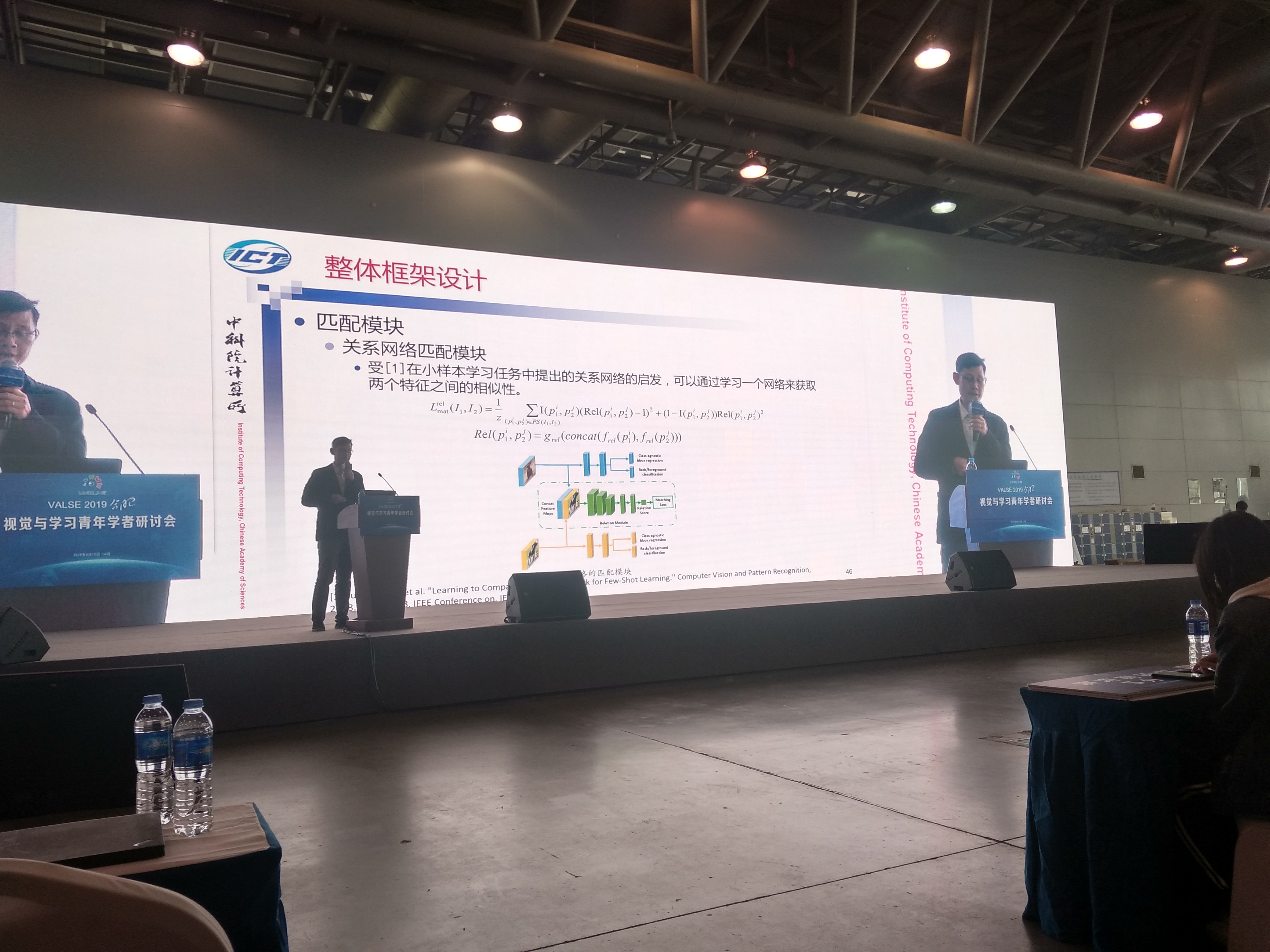
图像共同物体检测
- 图片
- 2D image中对一个关于物体的定义:
- 有一个清晰的闭合曲线边界
- 与周围有不同的外观
- 在该物体定义的区域内是突出显著的
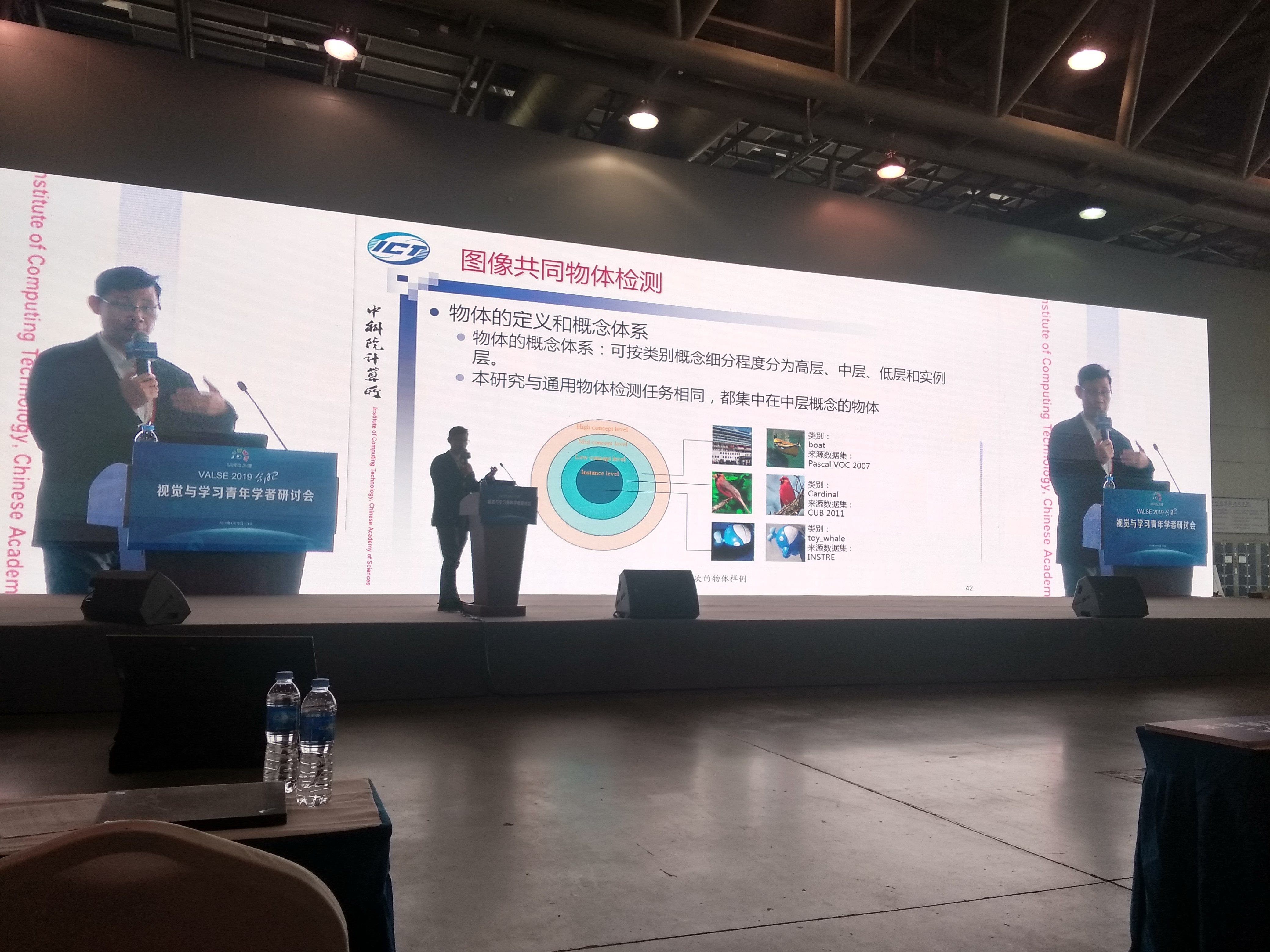
- 物体的概念体系:
- 类别概念分为:高层,中层(通用物体检测,object detection),实例层
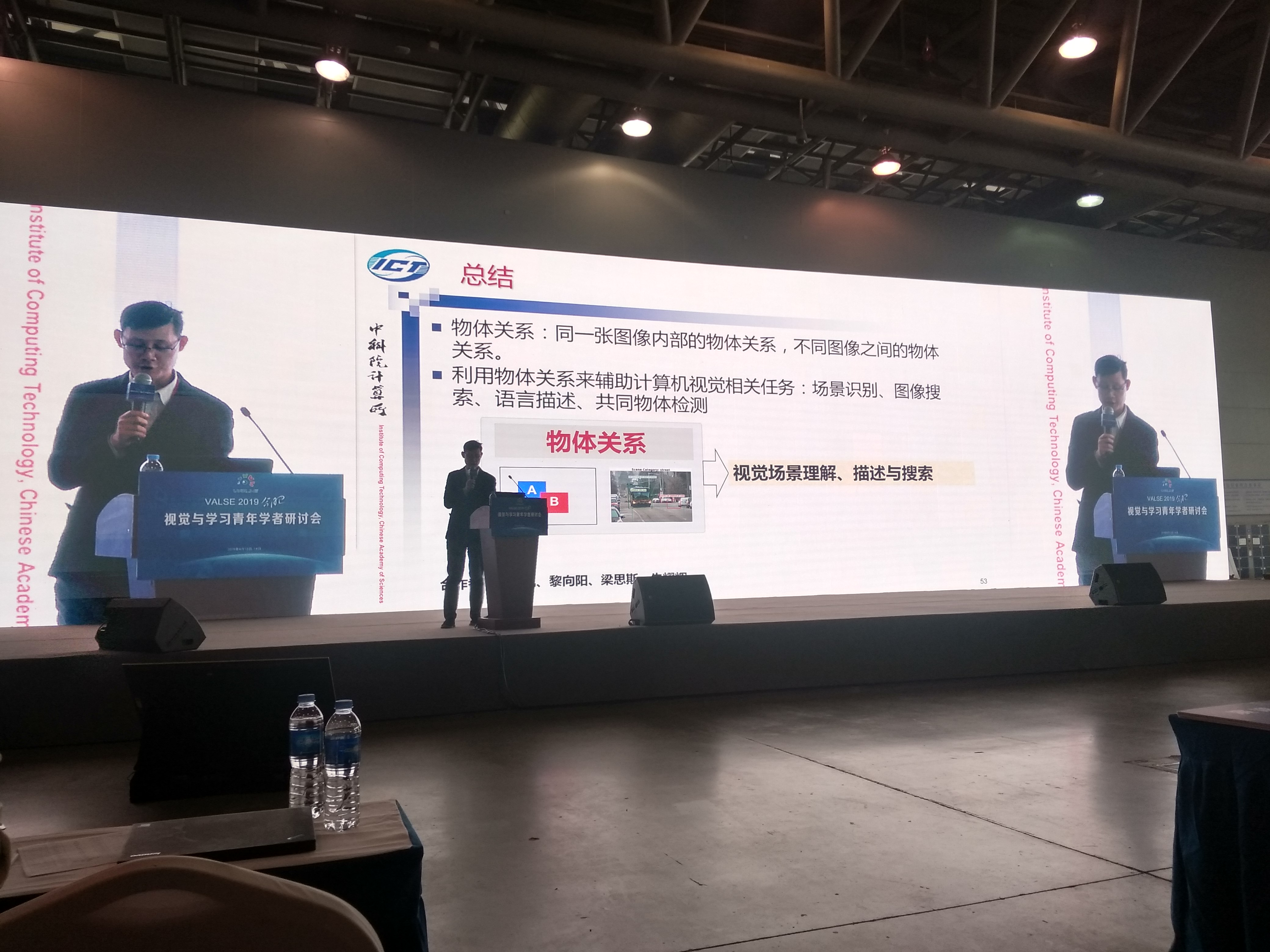
总结:
- 物体关系:同一张图像内部不同物体的关系,不同图像之间的物体间关系
- 利用物体关系来辅助计算机视觉相关任务:场景识别、图像搜索、语言描述、共同物体检测
一些图片