
- 1PageHelper循环依赖 com.github.pagehelper.autoconfigure.PageHelperAutoConfiguration_pagehelper循环依赖解决
- 2Flutter 封装官方【webview_flutter】,增加JSBridge回调_flutter jsbridge
- 3Vue实战(06)vue引入外部字体库_vue 项字体库
- 4纯CSS3文字效果推荐_css3 文字效果
- 5【吴恩达deeplearning.ai】基于ChatGPT API打造应用系统(上)_deeplearning.api
- 62020美赛E题O奖论文分析_2020美赛e题优秀论文
- 7python求巴特沃斯和高斯的低通滤波和高通滤波_高斯高通滤波python
- 8Unity3D 学习路线?_unity3d学习路线
- 9Unity中常用的数据结构_unity 数据结构
- 10拟合案例2:matlab实现分段函数拟合(分段点未知)及源码
2D坐标系与3D坐标系的相互转换--python实现_2维坐标转三维
赞
踩
并不是做关于SLAM方向的,但由于某些任务涉及到,故作此笔记~
相机内参矩阵:
不同的的深度摄像头具有不同的特征参数,在计算机视觉里,将这组参数设置为相机的内参矩阵C:
[
f
x
0
c
x
0
f
y
c
y
0
0
1
]
fx,fy指相机在x轴和y轴上的焦距,cx,cy是相机的光圈中心,这组参数是摄像头生产制作之后就固定的。
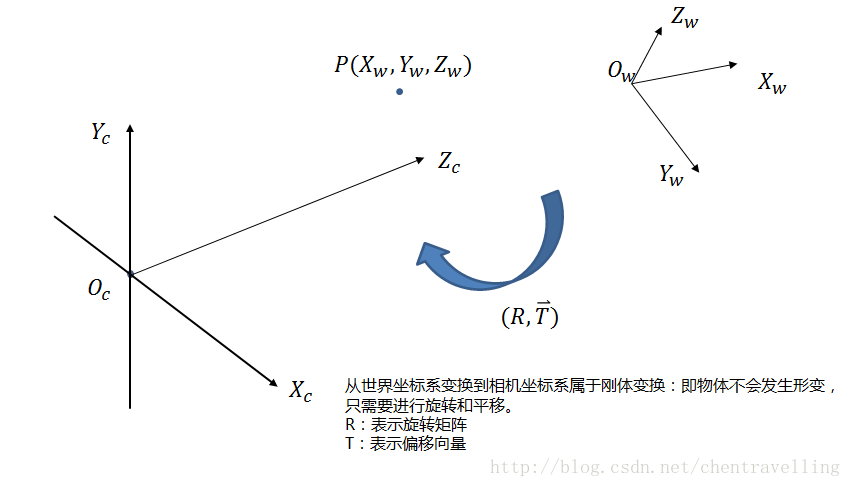
世界坐标系: 用户定义的三维世界坐标系,以某个点为远点,为描述目标物在真实世界里的位置而被引入
相机坐标系: 以相机为原点建立的坐标系,为了从相机的角度描述物体的位置而定义,作为沟通世界坐标系和图像/像素坐标系的中间一环。
学习自: 三维坐标变换——旋转矩阵与旋转向量
旋转矩阵:
使用矩阵来表示一个旋转关系有两个缺点: 1)通过旋转矩阵不能直观地看出旋转的方向和角度 2)另一方面:旋转变换有3个自由度,旋转矩阵中的元素不是相互独立的。
旋转向量:
设旋转向量的单位向量为r,模为θ。三维点(或者说三维向量)p在旋转向量 r 的作用下变换至 p′,则:
p
′
=
cos
θ
⋅
p
+
(
1
−
cos
θ
)
(
p
⋅
r
)
r
+
sin
θ
⋅
r
×
p'=\cos\theta\cdot p+(1-\cos\theta)(p\cdot r)r+\sin\theta\cdot r \times
p′=cosθ⋅p+(1−cosθ)(p⋅r)r+sinθ⋅r× p
学习自:计算机视觉:相机成像原理:世界坐标系、相机坐标系、图像坐标系、像素坐标系之间的转换
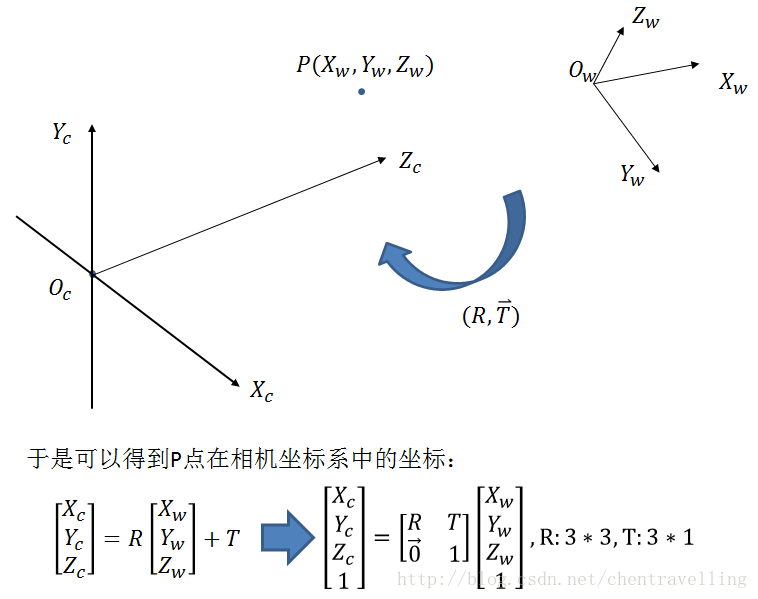
从世界坐标系到相机坐标系:
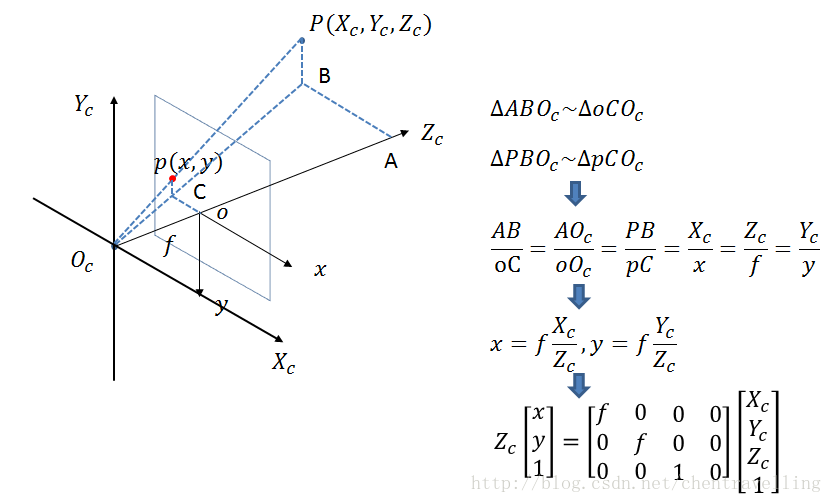
相机坐标系与图像坐标系:
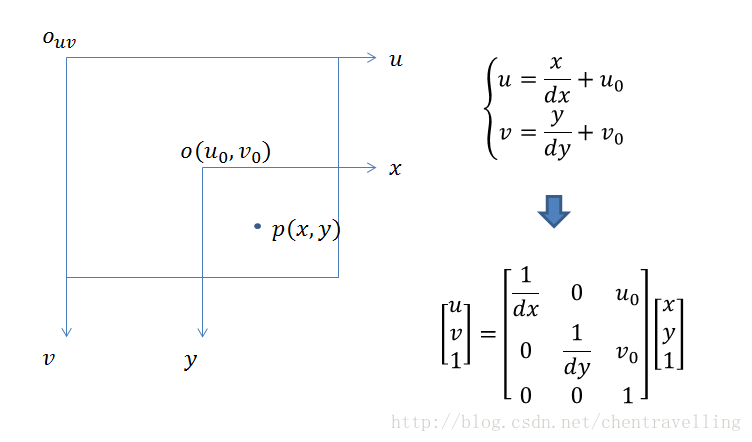
图像坐标系与像素坐标系:
像素坐标系和图像坐标系都在成像平面,只是各自的原点和度量单位不大一样,图像坐标系的原点为相机光轴与成像平面的交点。图像坐标系的单位是mm,属于物理单位,而像素坐标系的单位是pixel
像素坐标系与世界坐标系:
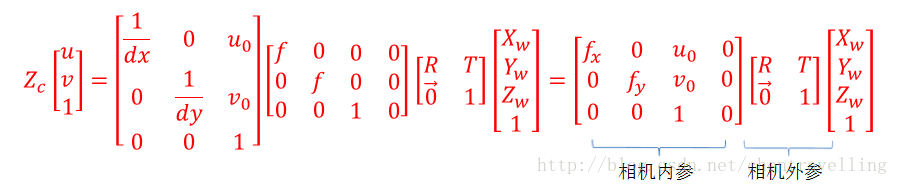
convert2Dto3D
通过上面的公式,将像素坐标系的点映射到世界坐标系上,由于二维坐标映射到三维坐标会多了一个深度信息,因此二维点映射到三维坐标系,得到的是一条射线。虽然通过下面的代码得到的确实是一个三维的坐标点,但是其实是不确定的,与光点连线上(射线)所有的点都满足条件
convert3Dto2D
将3D平面的box转成2D平面的box,通过cv.projectPoint(三维平面下的8个点,旋转矩阵, 平移向量, 相机内参, 0)可以得到3D平面下的8个点映射到2维平面下8个点的坐标
代码
# 此函数只是外部定义而已,大家可自行定义 camera_matrix, rvec, tvec = camera_params() print("相机内参:", camera_matrix) print("平移向量:", tvec) print("旋转矩阵:", rvec) # (R T, 0 1)矩阵 Trans = np.hstack((rvec, [[tvec[0]], [tvec[1]], [tvec[2]]])) # 相机内参和相机外参 矩阵相乘 temp = np.dot(camera_matrix, Trans) Pp = np.linalg.pinv(temp) # 点(u, v, 1) 对应代码里的 [605,341,1] p1 = np.array([605, 341, 1], np.float) print("像素坐标系的点:", p1) X = np.dot(Pp, p1) print("X:", X) # 与Zc相除 得到世界坐标系的某一个点 X1 = np.array(X[:3], np.float)/X[3] print("X1:", X1) ## 3D 转成 2D from utils import * import numpy as np import cv2 ## 2D 转成 3D # 此函数只是外部定义而已,大家可自行定义 camera_matrix, rvec, tvec = camera_params() print("相机内参:", camera_matrix) print("平移向量:", tvec) print("旋转矩阵:", rvec) # (R T, 0 1)矩阵 Trans = np.hstack((rvec, [[tvec[0]], [tvec[1]], [tvec[2]]])) # 相机内参和相机外参 矩阵相乘 temp = np.dot(camera_matrix, Trans) Pp = np.linalg.pinv(temp) # 点(u, v, 1) 对应代码里的 [605,341,1] p1 = np.array([605, 341, 1], np.float) print("像素坐标系的点:", p1) X = np.dot(Pp, p1) print("X:", X) # 与Zc相除 得到世界坐标系的某一个点 X1 = np.array(X[:3], np.float)/X[3] print("X1:", X1) ## 3D 转成 2D ## cube为世界坐标系的8个点的三维坐标 cube = np.float64([[-3.102,-1.58400011, 9.29399872],[-3.102, -0.08400005, 9.29399872] ,[-1.27200007,-0.08400005 , 9.29399872] ,[-1.27200007, -1.58400011 ,9.29399872] ,[-3.102 , -1.58400011 ,13.8939991 ] ,[-3.102 , -0.08400005, 13.8939991 ] ,[-1.27200007 ,-0.08400005, 13.8939991 ] ,[-1.27200007, -1.58400011 ,13.8939991 ]]) result, _ = cv2.projectPoints(cube, rvec, tvec, camera_matrix, 0) print("3D to 2D 的 8个点的坐标:", result)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86

