
热门标签
热门文章
- 1FPGA综合系统设计(三):贪吃蛇游戏(键盘+VGA)_基于vga的游戏设计的系统框图,画出各功能模块之间的连线
- 2干货|使用git中钩子文件做代码提交前的检查
- 3Neo4j-简单使用_neo4j使用
- 4Spring Boot 3.0:未来企业应用开发的基石_springboot 3.0
- 5海量数据处理-大数据离线批处理技术篇_大数据离线数据处理批量数据处理
- 6Linux与Windows下追踪网络路由:traceroute、tracepath与tracert命令详解_traceroute windows
- 7JMeter入门9---Tcp sampler AES加密_java tcp sampler
- 8解决MySql事务引起CannotAcquireLockException的问题
- 9京准电钟|基于纳秒级的GPS北斗卫星授时服务器
- 10SpringBoot 集成RabbitMQ集群及简单操作_springboot rabbitmq集群
当前位置: article > 正文
路径规划:RRT算法在ROS中的实现_rrt*算法在ros中的实现
作者:木道寻08 | 2024-07-05 06:31:21
赞
踩
rrt*算法在ros中的实现
1.环境
ubuntu18.04
ROS版本:melodic
小车:Turtlebot3
2.实现算法
RRT
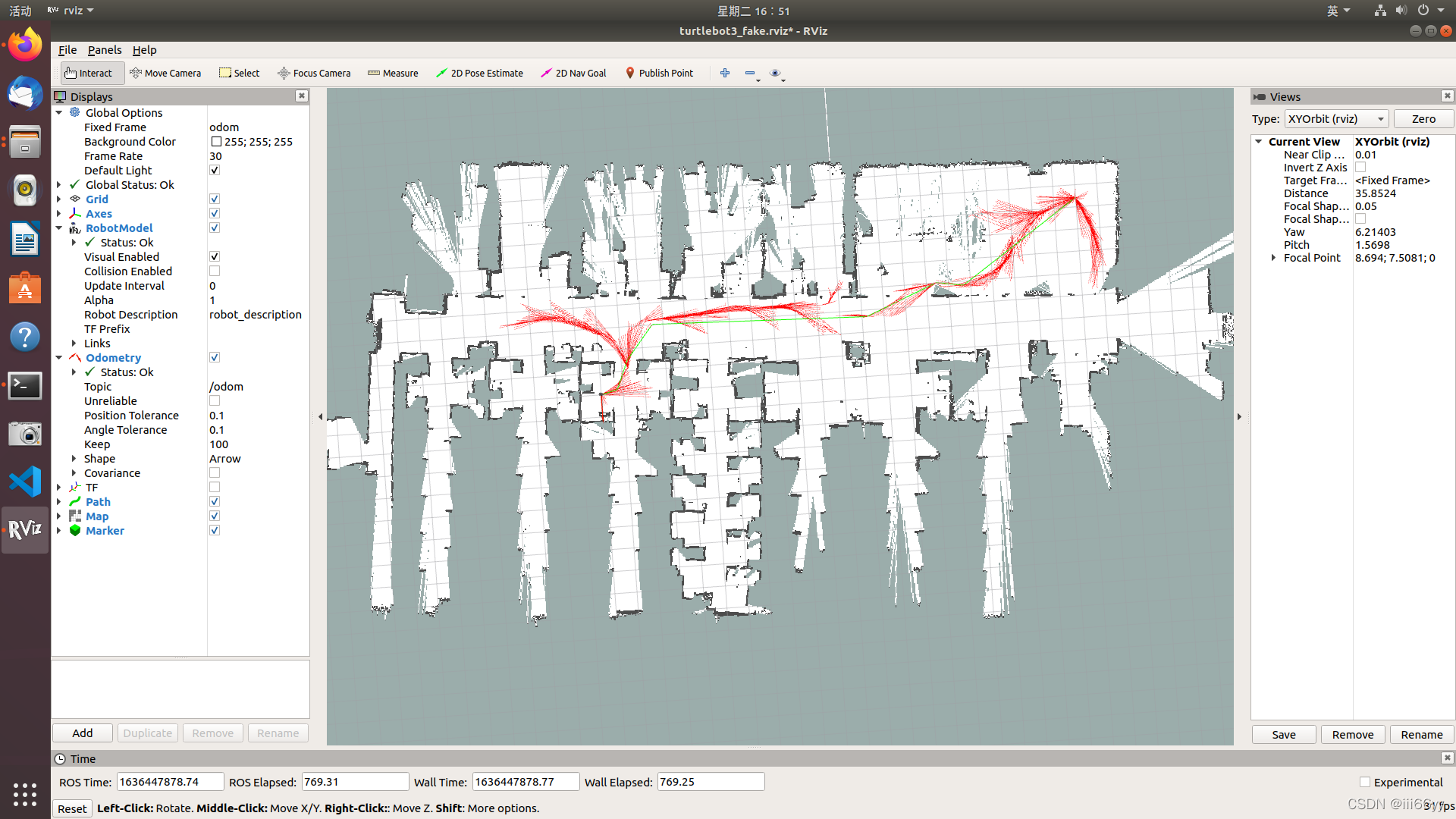
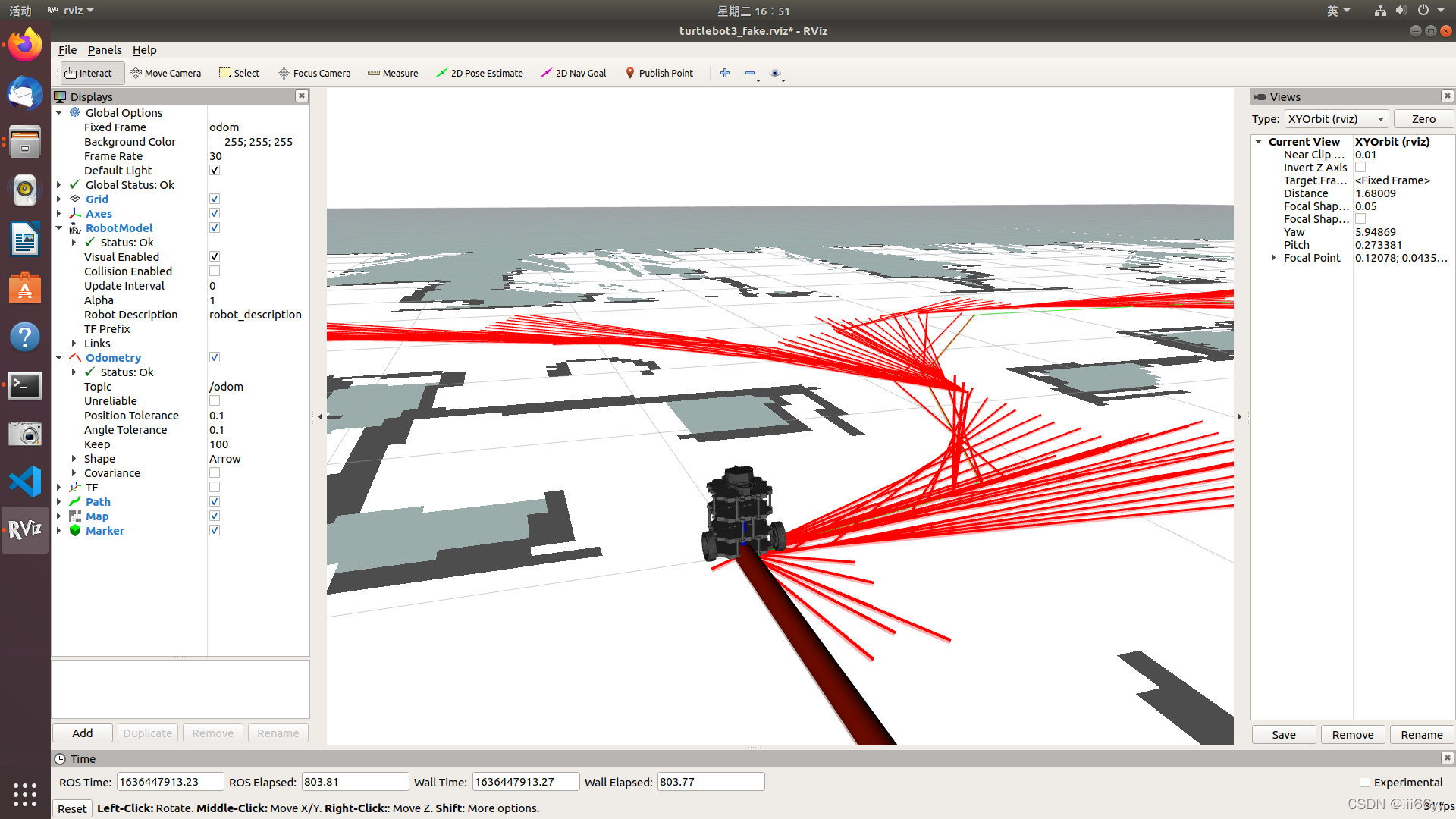
3.最终效果
4.代码链接
https://download.csdn.net/download/iii66yy/74376218
5.实现步骤
① 新建工作空间
② 在工作空间中新建文件夹src,将下载好的代码放进src中
③ 在工作空间下打开终端,编译
catkin_make
- 1

④ 没有这一步运行launch文件会报错
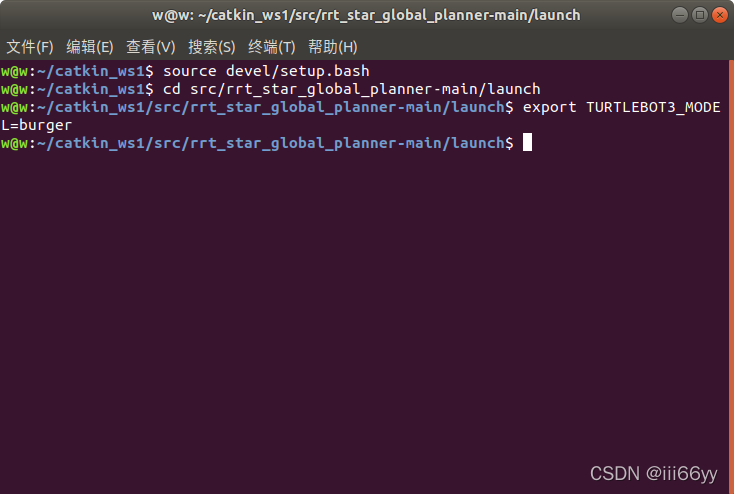
source devel/setup.bash
- 1
⑤ 进入含有launch文件的文件夹
cd src/rrt_star_global_planner-main/launch
- 1
⑥ turtlebot3小车的类型
export TURTLEBOT3_MODEL=burger
- 1
⑦ 运行launch文件
roslaunch rrt_node.launch
- 1
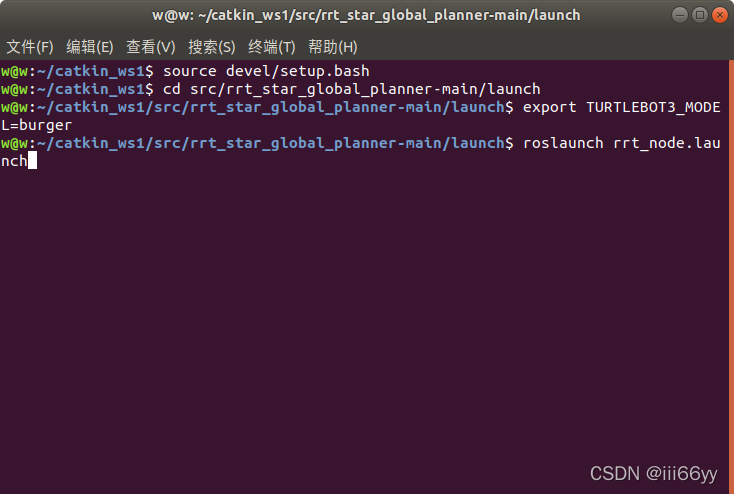
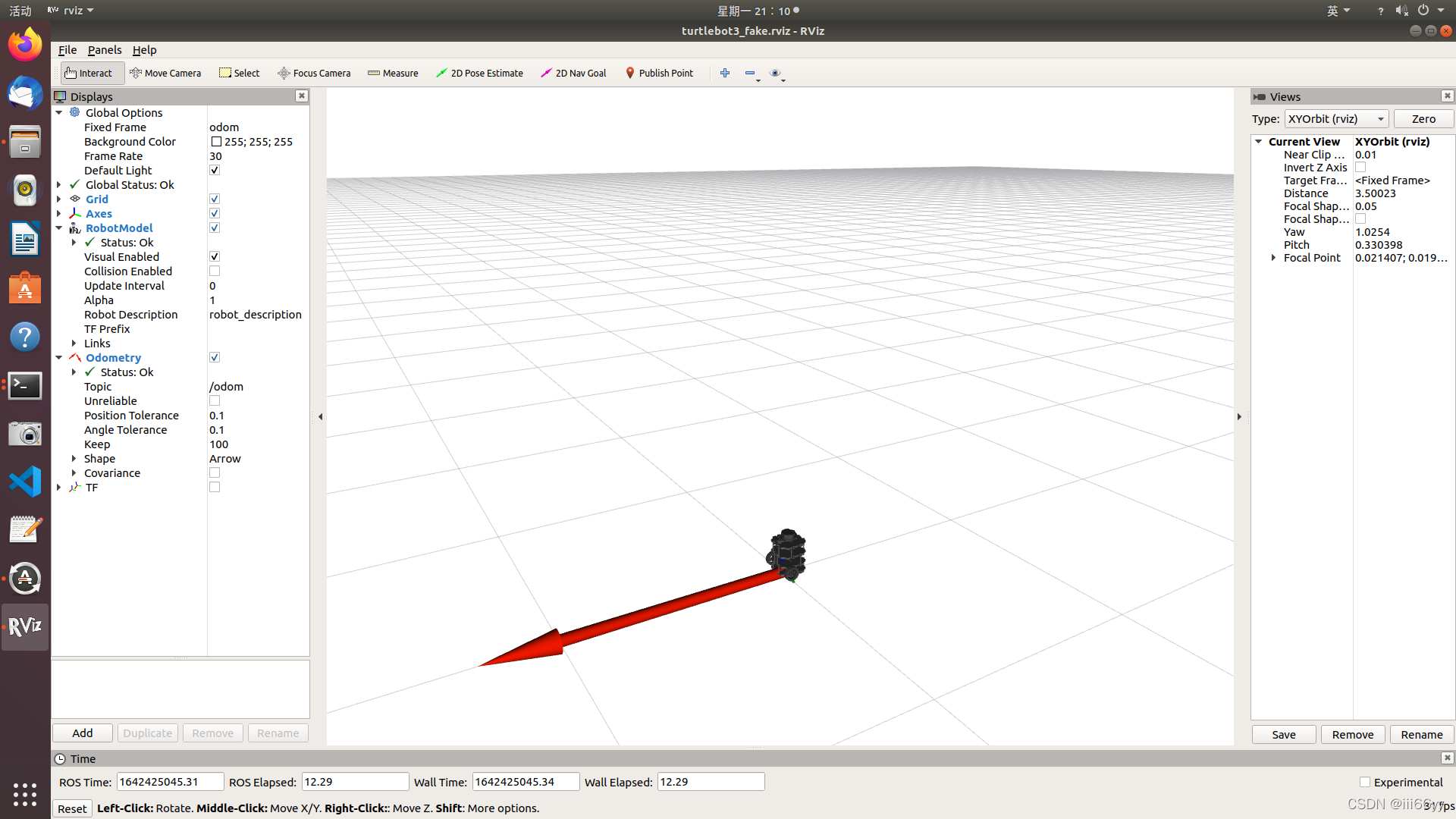
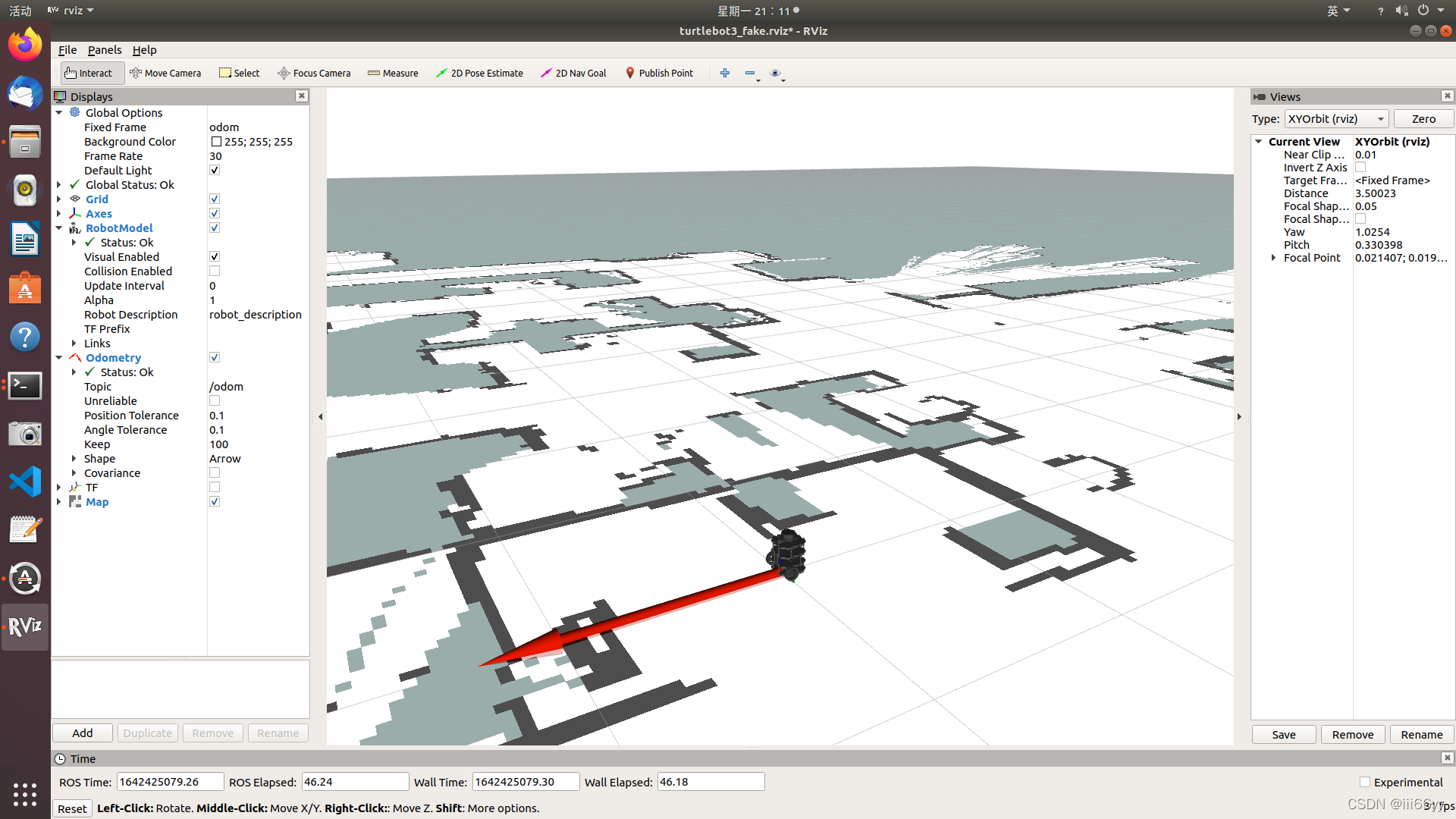
⑧ 启动launch文件后的
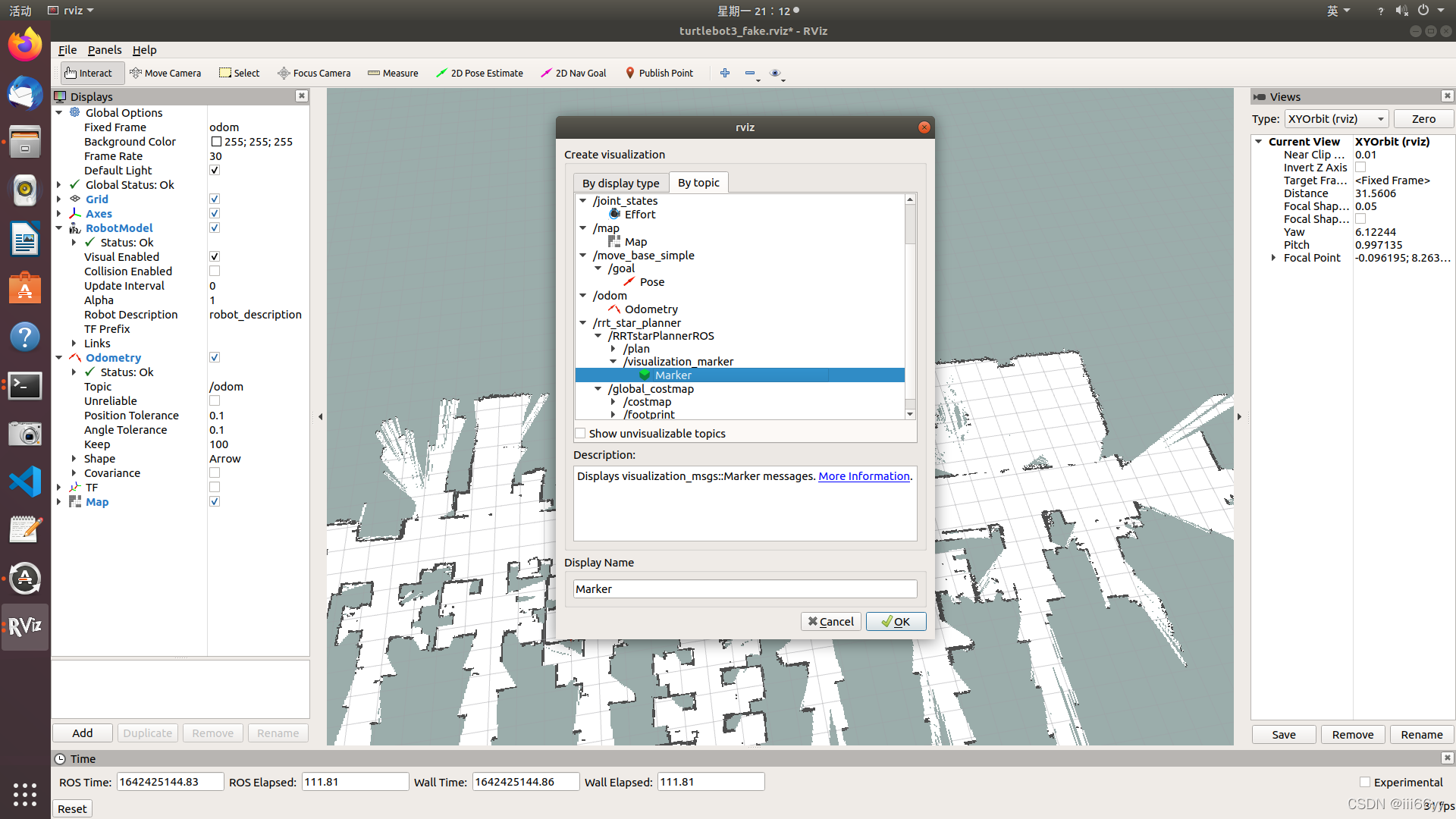
⑨ 点击左下角的Add,然后点by topic,选择Map
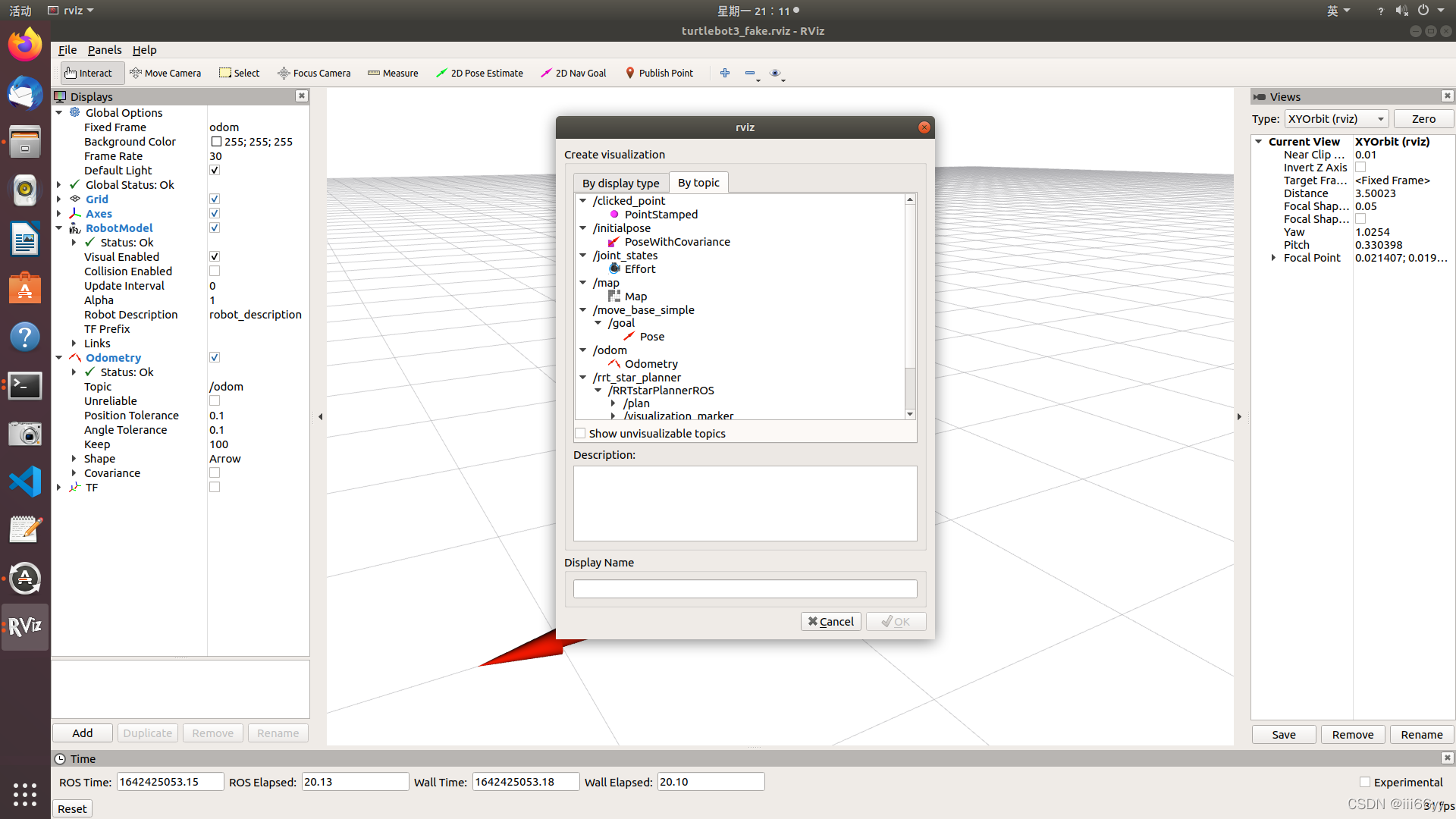
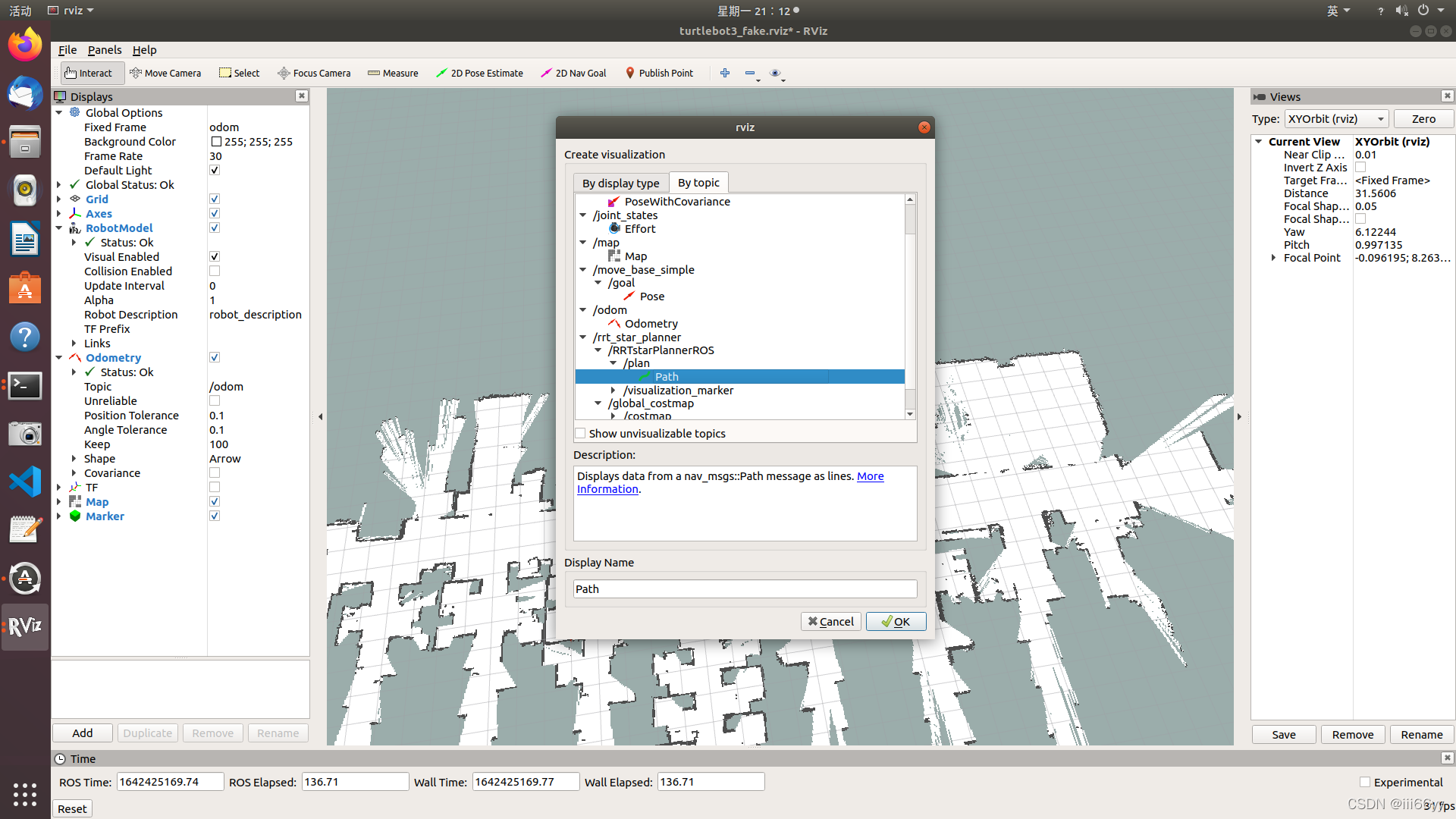
⑩ 选择可视化、路径
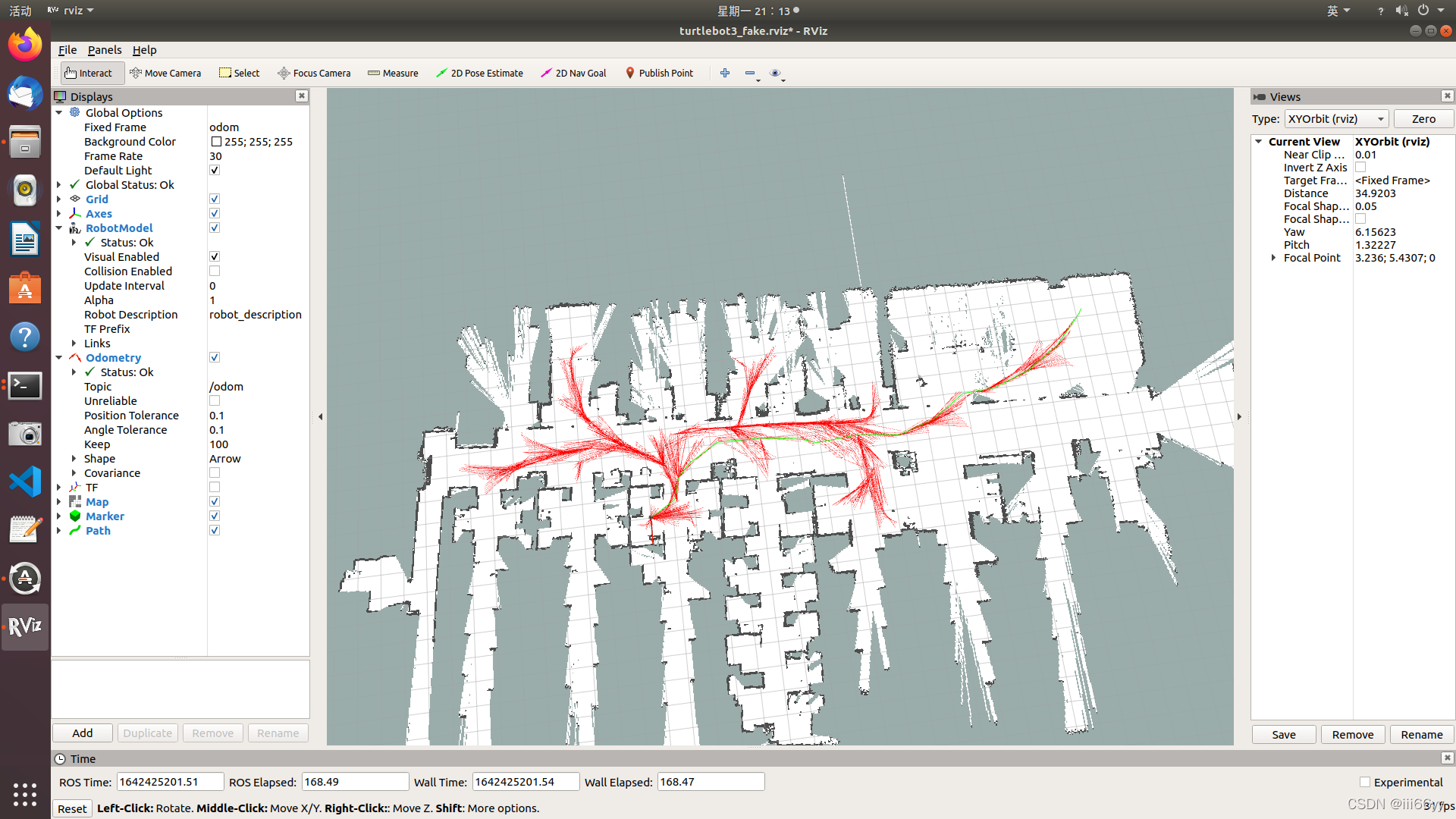
给目标点后
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/木道寻08/article/detail/789425
推荐阅读
相关标签

