
- 1Git远程操作详解
- 2(245套)2024-2025计算机毕业设计选题题目推荐-毕设题目汇总大全_2025年计算机专业毕业设计选题
- 3Ollama&llama_ollama server 模式下,调用ollama 接口
- 4Golang | Leetcode Golang题解之第199题二叉树的右视图
- 5微信公众号对接openai详细教程,手把手教你搭建自己的gpt智能助手_微信公众号接入chatgpt
- 6OpenHarmony操作系统开发必备软件_开发操作系统要学什么软件
- 7idm无法下载受保护的视频解决方法_idm无法下载此受保护的数据怎么办
- 8用sql实现两行记录合并为一行记录_sql 查询数据将第二行的数据拼接到第一行后面
- 9公共数据+人工智能+强化学习模型,82.9分的《自然》顶级子刊说发就发!代码也公开,接稳咯!
- 10银行春招:六大行薪资待遇知多少?(上)_国有六大行待遇排名
植保无人机方案实施_植保无人机服务方案
赞
踩
本技术产品采用STM32F10F103RCT6STM32F103RCT6是一种嵌入式-微控制器的集成电路(IC),芯体尺寸是32位,速度是72MHz,程序存储器容量是256KB,程序存储器类型是FLASH,RAM容量是48K。
连通性:CAN,I2C,IrDA,LIN,SPI,UART/USART,USB
外围设备:DMA,电机控制PWM,PDR,POR,PVD,PWM,温度传感器,WDT,晶振
输入/输出数:51
程序存储器容量:256KB
程序存储器类型:FLASH
拆分模块介绍一下吧
一、PID算法:
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器(亦称PID调节器)是应用最为广泛的一种自动控制器。它具有原理简单,易于实现,适用面广,控制参数相互独立,参数的选定比较简单等优点;
PID是闭环控制算法。需要在硬件上具有闭环控制,那么就得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制端
PID是比例§、积分(I)、微分(D)控制算法。但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的闭环控制算法。
3,比例§、积分(I)、微分(D)控制算法各有作用:
比例,反应系统的基本(当前)偏差e(t),系数大,可以加快调节,减小误差,但过大的比例使系统稳定性下降,甚至造成系统不稳定;
积分,反应系统的累计偏差,使系统消除稳态误差,提高无差度,因为有误差,积分调节就进行,直至无误差;
微分,反映系统偏差信号的变化率e(t)-e(t-1),具有预见性,能预见偏差变化的趋势,产生超前的控制作用,在偏差还没有形成之前,已被微分调节作用消除,因此可以改善系统的动态性能。但是微分对噪声干扰有放大作用,加强微分对系统抗干扰不利。 积分和微分都不能单独起作用,必须与比例控制配合。

二、mpu6050:ALIENTEK 推出的一款高性能三轴加速度+三轴陀螺仪的六轴传感器模块,并可利用自带的数字运动处理器(DMP: Digital Motion Processor)硬件加速引擎,通过主IIC 接口,向应用端输出姿态解算后的数据。
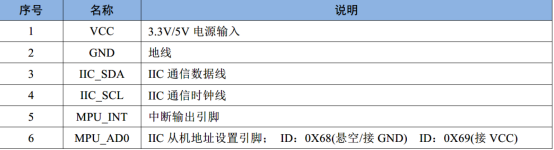
IIC总线是一种由 PHILIPS 公司开发的两线式串行总线,用于连接 微控制器及其外围设备。它是由数据线 SDA 和时钟 SCL 构成的串行总线,可发送和接收数据。在CPU与被控IC之间、IC与 IC之间进行双向传送,高速IIC总线一般可达 400kbps以上。
I2C 总线在传送数据过程中共有三种类型信号, 它们分别是:开始信号、结束信号和应答信号。 开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
开始信号:SCL 为高电平时,SDA 由高电平向低电平跳变,开始传送数据。
结束信号:SCL 为高电平时,SDA 由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的 IC 在接收到 8bit 数据后,向发送数据的 IC 发出特定的低电平脉冲,表示已收到数据。
三、NRF24L01是一款无线通信通信芯片,采用FSK 调制。可以实现点对点或是1对6的无线通信。无线通信速度最高可达到2Mbps。
NRF24L01采用SPI通信,可以很方便的连接到MCU上面。
SPI通信协议:
SPI总线
(1)MOSI – 主器件数据输出,从器件数据输入
(2)MISO – 主器件数据输入,从器件数据输出
(3)SCLK –时钟信号,由主器件产生,最大为fPCLK/2,从模式频率最大为fCPU/2
(4)NSS/CS – 从器件使能信号,由主器件控制,有的IC会标注为CS(Chip select)
传输数据步骤如下
开始条件:NSS为低电平(0)
发送数据:从最高位开始(MSB)
Mode0和Mode2
是在第一个边沿时就进行数据的读取,所以bit1的输出是在第一个边沿之前就发送
Mode1和Mode3
是在第二个边沿时就进行数据的读取,所以bit1的输出是在第一个边沿时就发送发送的数据需要看相应的Datasheet,我遇到过数据一部分从最低位LSB开始
结束条件:NSS为高电平(1)
四、GPS模块:Air530 模块是一款高性能、高集成度的多模卫星定位导航模块。体积小、功耗低,可用于车载导 航、智能穿戴、无人机等 GNSS 定位的应用中。而且提供了和其他模块厂商兼容的软、硬件接口,大幅 减少了用户的开发周期。

模块支持GPS/Beidou/GLONASS/Galileo/QZSS/SBAS。采用了射频基带一体化设计,集成了 DC/DC、 LDO、 LNA、射频前端、基带处理、32 位 RISC CPU、RAM、FLASH 存储、RTC 和电源管理等功能。提供 超高的性能,即使在弱信号的地方,也能快速、准确的定位。
这个模块有五个引脚。如果只是简单的定位玩一下的话,那个1pps引脚不用也可以。
VDD 供电电源,电压输入 范围 3.3V-5.5V
TXD GPS 串口数据输出, 2.8V–5V 自适应
RXD GPS 串口数据输入, 2.8V–5V 自适应
1PPS One plus per second(2.8V)
GND 接地
1.NMEA协议
在编写驱动程序前一定要知道NMEA协议。NMEA是(National Marine Electronics Association )为海用电子设备制定的标准格式。NMEA缩写,同时也是数据传输标准工业协会,在这里,实际上应为NMEA 0183。它是一套定义接收机输出的标准信息,有几种不同的格式,每种都是独立相关的ASCII格式,逗点隔开数据流,数据流长度从30-100字符不等,通常以每秒间隔选择输出,最常用的格式为"GGA",它包含了定位时间,纬度,经度,高度,定位所用的卫星数,DOP值,差分状态和校正时段等,其他的有速度,跟踪,日期等。NMEA实际上已成为所有的GPS接收机和最通用的数据输出格式,同时它也被用于与GPS接收机接口的大多数的软件包里。NMEA-0183协议定义的语句非常多,但是常用的或者说兼容性最广的语句只有
G
P
G
G
A
、
GPGGA、
GPGGA、GPGSA、
G
P
G
S
V
、
GPGSV、
GPGSV、GPRMC、
G
P
V
T
G
、
GPVTG、
GPVTG、GPGLL等。
AIR530 模块支持 NMEA 0183 V4.1 协议并兼容以前版本,关于 NMEA 0183 V4.1 的详细信息请参照 NMEA 0183 V4.1 官方文档。
GGA:时间、位置、卫星数量
GLL:经度、纬度、 UTC 时间
GSA:GPS 接收机操作模式,定位使用的卫星,DOP 值,定位状态
GSV:可见 GPS 卫星信息、仰角、方位角、信噪比
RMC:时间、日期、位置、速度 VTG:地面速度信息
- 相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

