
- 1早产儿视网膜病变分期,自动化+半监督(无需大量医生标注数据)
- 2【Django】执行查询—创建和修改对象
- 3import matplotlib
- 4分类预测 | MATLAB实现基于Attention-LSTM的多特征分类预测(长短期记忆网络融合注意力机制分类预测,含混淆矩阵图、分类图)
- 5数据结构与算法-----LRU算法的实现_lru算法数据结构
- 6公司构成-英文
- 7操作系统——FIFO和LRU页面置换算法_fifo页面置换算法
- 8Lottie 动画库使用_setimageassetsfolder
- 9百亿级并发系统设计:阿里P8整理的实战教程,助你技术飞跃_阿里p8技术
- 10新手建站指南—宝塔面板的安装与使用教程(详细)
OpenVINO 2022.3实战一:Window 10 环境下用 OpenVINO 2022.3部署yolov5 7.0_windows 下openvino编译
赞
踩
Window 10 环境下用 OpenVINO 2022.3部署yolov5_7.0
1 下载并解压 OpenVINO Runtime
OpenVINO™ Runtime 2022.3 以压缩包 (OpenVINO Archives) 的形式提供。
下载地址: storage.openvinotoolkit.org
下载后解压到 C:\Intel\openvino_2022.3.0
配置环境:
C:\Intel\openvino_2022.3.0\setupvars.bat
- 1
其中 OpenVINO C++ 推理程序所必需的文件在runtime目录下:
- 头文件:include 文件夹
- lib 文件:lib 文件夹
- 可执行文件 (*.exe) 所需的动态链接库文件:bin 文件夹
- OpenVINO runtime 第三方依赖库文件:3rdparty 文件夹
2 下载并编译 OpenCV
下载地址:_opencv
2-1 下载预编译OpenCV
直接下载 windows 编译版本,下载后解压到 E:\opencv455目录下即可
2-2 编译与OpenVINO对应的OpenCV
下载 Sources源码到本地, 解压到E:\opencv-4.5.5
mkdir "mybuild" && cd "mybuild"
- 1
cmake 编译项设置
test选项 不选

python 选项 不选
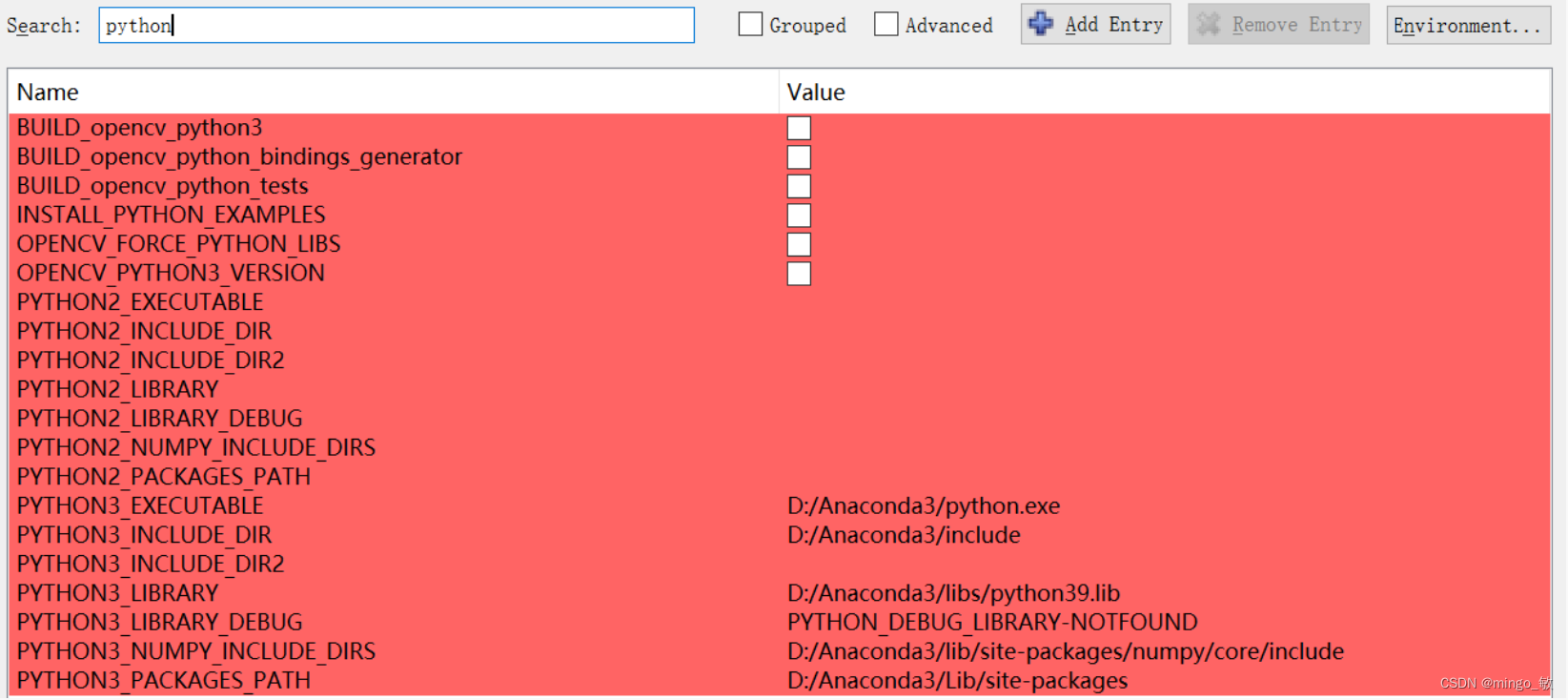
OPENCV_GENERATE_SETUPVARS 不选

WITH_OPENMP 选中

WITH_IPP 选中

BUILD_opencv_world 选中

OPENCV_EXTRA_MODULES_PATH 设置 E:/opencv_contrib-4.5.5/modules

cmake编译可以参考
Windows10+Cmake+VS2019编译opencv(超级详细)_vs编译opencv_乐安世家的博客-CSDN博客
win10+vs2017+opencv4.5.0+opencv_contrib-4.5.0+cuda源码编译详细教程_vs2017 源码编译opencv_Bubble_water的博客-CSDN博客
opencv4.2.0 源码编译,win7+VS2015,DNN模块支持cuda加速_蜡笔小心点的博客-CSDN博客
3 在 Visual Studio 中配置项目属性
Release:
属性 --> VC++ 目录 --> 包含目录
C:\Intel\openvino_2022.3.0\runtime\include
E:\opencv455\build\include
- 1
- 2
属性 --> VC++ 目录 --> 库目录
C:\Intel\openvino_2022.3.0\runtime\lib\intel64\Release
E:\opencv455\build\x64\vc15\lib
- 1
- 2
属性 --> 链接器 --> 输入 --> 附加依赖项
openvino.lib
opencv_world455.lib
- 1
- 2
动态链接库 配置
将 C:\Intel\openvino_2022.3.0\runtime\bin\intel64\Release目录下的
openvino.dll
openvino_intel_cpu_plugin.dll
openvino_ir_frontend.dll
plugins.xml
- 1
- 2
- 3
- 4
将 C:\Intel\openvino_2022.3.0\runtime\3rdparty\tbb\bin目录下的
tbb.dll
- 1
将 E:\opencv455\mybuild\x64\vc15\bin 目录下的
opencv_world455.dll
- 1
移动到 可执行文件目录 或者将三个路径加入系统目录。
Debug:
属性 --> VC++ 目录 --> 包含目录
C:\Intel\openvino_2022.3.0\runtime\include
E:\opencv455\build\include
- 1
- 2
属性 --> VC++ 目录 --> 库目录
C:\Intel\openvino_2022.3.0\runtime\lib\intel64\Debug
E:\opencv455\build\x64\vc15\lib
- 1
- 2
属性 --> 链接器 --> 输入 --> 附加依赖项
openvinod.lib
opencv_world455d.lib
- 1
- 2
动态链接库 配置
将 C:\Intel\openvino_2022.3.0\runtime\bin\intel64\Debug目录下的
openvinod.dll
openvino_intel_cpu_plugind.dll
openvino_ir_frontendd.dll
plugins.xml
- 1
- 2
- 3
- 4
将 C:\Intel\openvino_2022.3.0\runtime\3rdparty\tbb\bin目录下的
tbb.dll
- 1
将 E:\opencv455\mybuild\x64\vc15\bin 目录下的
opencv_world455d.dll
- 1
移动到 可执行文件目录 或者将三个路径加入系统目录。
4 导出onnx模型
下载yolov5代码 ultralytics/yolov5
python export.py --weights yolov5s.pt --include torchscript onnx openvino
- 1
导出模型为 yolov5s_openvino_model

5 代码
yolov5_openvino.cpp
// yolov5_openvino.cpp : 此文件包含 "main" 函数。程序执行将在此处开始并结束。 // // Copyright (C) 2018-2022 Intel Corporation // SPDX-License-Identifier: Apache-2.0 // #pragma warning(disable:4996) #include <opencv2/dnn.hpp> #include <openvino/openvino.hpp> #include <opencv2/opencv.hpp> using namespace std; const float SCORE_THRESHOLD = 0.2; const float NMS_THRESHOLD = 0.4; const float CONFIDENCE_THRESHOLD = 0.4; struct Detection { int class_id; float confidence; cv::Rect box; }; struct ResizeImage { cv::Mat img; int dw; int dh; }; ResizeImage resize_and_pad(cv::Mat& img, cv::Size new_shape) { float width = img.cols; float height = img.rows; float r = float(new_shape.width / max(width, height)); int new_unpadW = int(round(width * r)); int new_unpadH = int(round(height * r)); ResizeImage resizedImg; cv::resize(img, resizedImg.img, cv::Size(new_unpadW, new_unpadH), 0, 0, cv::INTER_AREA); resizedImg.dw = new_shape.width - new_unpadW; resizedImg.dh = new_shape.height - new_unpadH; cv::Scalar color = cv::Scalar(100, 100, 100); cv::copyMakeBorder(resizedImg.img, resizedImg.img, 0, resizedImg.dh, 0, resizedImg.dw, cv::BORDER_CONSTANT, color); return resizedImg; } int main() { // Step 1. Initialize OpenVINO Runtime core ov::Core core; // Step 2. Read a model std::shared_ptr<ov::Model> model = core.read_model("E:\\python_code\\yolov5\\weights\\openvino\\yolov5s_openvino_model\\yolov5s.xml"); // Step 3. Read input image cv::Mat img = cv::imread("E:\\cpp_code\\images\\zidane.jpg"); // resize image ResizeImage res = resize_and_pad(img, cv::Size(640, 640)); // Step 4. Inizialize Preprocessing for the model ov::preprocess::PrePostProcessor ppp = ov::preprocess::PrePostProcessor(model); // Specify input image format ppp.input().tensor().set_element_type(ov::element::u8).set_layout("NHWC").set_color_format(ov::preprocess::ColorFormat::BGR); // Specify preprocess pipeline to input image without resizing ppp.input().preprocess().convert_element_type(ov::element::f32).convert_color(ov::preprocess::ColorFormat::RGB).scale({ 255., 255., 255. }); // Specify model's input layout ppp.input().model().set_layout("NCHW"); // Specify output results format ppp.output().tensor().set_element_type(ov::element::f32); // Embed above steps in the graph model = ppp.build(); ov::CompiledModel compiled_model = core.compile_model(model, "CPU"); // Step 5. Create tensor from image float *input_data = (float *)res.img.data; ov::Tensor input_tensor = ov::Tensor(compiled_model.input().get_element_type(), compiled_model.input().get_shape(), input_data); // Step 6. Create an infer request for model inference ov::InferRequest infer_request = compiled_model.create_infer_request(); infer_request.set_input_tensor(input_tensor); infer_request.infer(); //Step 7. Retrieve inference results const ov::Tensor &output_tensor = infer_request.get_output_tensor(); ov::Shape output_shape = output_tensor.get_shape(); float *detections = output_tensor.data<float>(); // Step 8. Postprocessing including NMS std::vector<cv::Rect> boxes; vector<int> class_ids; vector<float> confidences; for (int i = 0; i < output_shape[1]; i++) { float *detection = &detections[i * output_shape[2]]; float confidence = detection[4]; if (confidence >= CONFIDENCE_THRESHOLD) { float *classes_scores = &detection[5]; cv::Mat scores(1, output_shape[2] - 5, CV_32FC1, classes_scores); cv::Point class_id; double max_class_score; cv::minMaxLoc(scores, 0, &max_class_score, 0, &class_id); if (max_class_score > SCORE_THRESHOLD) { confidences.push_back(confidence); class_ids.push_back(class_id.x); float x = detection[0]; float y = detection[1]; float w = detection[2]; float h = detection[3]; float xmin = x - (w / 2); float ymin = y - (h / 2); boxes.push_back(cv::Rect(xmin, ymin, w, h)); } } } std::vector<int> nms_result; cv::dnn::NMSBoxes(boxes, confidences, SCORE_THRESHOLD, NMS_THRESHOLD, nms_result); std::vector<Detection> output; for (int i = 0; i < nms_result.size(); i++) { Detection result; int idx = nms_result[i]; result.class_id = class_ids[idx]; result.confidence = confidences[idx]; result.box = boxes[idx]; output.push_back(result); } // Step 9. Print results and save Figure with detections for (int i = 0; i < output.size(); i++) { auto detection = output[i]; auto box = detection.box; auto classId = detection.class_id; auto confidence = detection.confidence; float rx = (float)img.cols / (float)(res.img.cols - res.dw); float ry = (float)img.rows / (float)(res.img.rows - res.dh); box.x = rx * box.x; box.y = ry * box.y; box.width = rx * box.width; box.height = ry * box.height; cout << "Bbox" << i + 1 << ": Class: " << classId << " " << "Confidence: " << confidence << " Scaled coords: [ " << "x: " << (float)box.x << ", " << "y: " << (float)box.y << ", " << "w: " << (float)box.width << ", " << "h: " << (float)box.height << " ]" << endl; float xmax = box.x + box.width; float ymax = box.y + box.height; cv::rectangle(img, cv::Point(box.x, box.y), cv::Point(xmax, ymax), cv::Scalar(0, 255, 0), 3); cv::rectangle(img, cv::Point(box.x, box.y - 20), cv::Point(xmax, box.y), cv::Scalar(0, 255, 0), cv::FILLED); cv::putText(img, std::to_string(classId), cv::Point(box.x, box.y - 5), cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0)); } cv::imwrite("detection.png", img); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
常见问题
1 error C4996: ‘ov::Node::evaluate_upper’: This method is deprecated and will be removed soon. Please use evaluate_upper with ov::Tensor instead
解决方法: 代码中加入 #pragma warning(disable:4996) 即可
2 DNN: CUDA backend requires CUDA Toolkit. Please resolve dependency or disable OPENCV_DNN_CUDA=OFF"
解决方法:https://github.com/opencv/opencv/issues/18528
参考资料:
1 Installing Intel® Distribution of OpenVINO™ Toolkit — OpenVINO™ documentation
2 How to use OpenCV with OpenVINO - OpenCV
3 BuildOpenCV4OpenVINO · opencv/opencv Wiki · GitHub
4 TFLite, ONNX, CoreML, TensorRT Export - Ultralytics YOLOv8 Docs

