- 1(提示词之家、ora.ai、科大讯飞、豆包、百科Ai)分享好用的ChatGPT
- 2php中把URL中的汉字转码_php 中文转码
- 3ADOP告诉您 2024年人工智能是什么?它的类型、趋势和未来?下篇
- 4imx6ull配置交叉编译环境编译u-boot及linux所遇问题解决记录
- 51、【AI技术新纪元:Spring AI解码】Spring AI 应用框架_spring ai huggingface
- 6CocoaPods - podspec私有库配置_pod_target_xcconfig
- 7JAVA ssh远程连接centos或suse系统报错:密码认证失败 java.io.IOException: Password authentication failed
- 8LeetCode //C - 31. Next Permutation
- 9关于网络协议的笔记
- 105v 温度范围_液位变送器温度漂移的处理及输出的变换
无人机集群路径规划:淘金优化算法(Gold rush optimizer,GRO)提供MATLAB代码
赞
踩
一、淘金优化算法GRO
淘金优化算法(Gold rush optimizer,GRO)由Kamran Zolf于2023年提出,其灵感来自淘金热,模拟淘金者进行黄金勘探行为。

参考文献: K. Zolfi. Gold rush optimizer: A new population-based metaheuristic algorithm. Operations Research and Decisions 2023: 33(1), 113-150. DOI 10.37190/ord230108
二、无人机模型
无人机三维路径规划是无人机在执行任务过程中的非常关键的环节,无人机三维路径规划的主要目的是在满足任务需求和自主飞行约束的基础上,计算出发点和目标点之间的最佳航路。模型详细介绍如下:
无人机三维路径规划:淘金优化算法(Gold rush optimizer,GRO)提供MATLAB代码_IT猿手的博客-CSDN博客
无人机三维航迹规划无人机航迹规划IT猿手的博客-CSDN博客
参考文献:
[1]吕石磊,范仁杰,李震,陈嘉鸿,谢家兴.基于改进蝙蝠算法和圆柱坐标系的农业无人机航迹规划[J].农业机械学报:1-19
[2]褚宏悦,易军凯.无人机安全路径规划的混沌粒子群优化研究[J].控制工程:1-8
[3]MD Phung, Ha Q P . Safety-enhanced UAV Path Planning with Spherical Vector-based Particle Swarm Optimization: arXiv, 10.1016/j.asoc.2021.107376[P]. 2021.
[4]陈明强,李奇峰,冯树娟等.基于改进粒子群算法的无人机三维航迹规划[J].无线电工程,2023,53(02):394-400.
[5]徐建新,孙纬,马超.基于改进粒子群算法的无人机三维路径规划[J].电光与控制:1-10
[6]骆文冠,于小兵.基于强化学习布谷鸟搜索算法的应急无人机路径规划[J].灾害学:1-10
三、淘金优化算法GRO求解无人机集群路径规划
- close all
- clear
- clc
- dbstop if all error
- global model
-
-
-
- model = CreateModel(); % 创建模型
- F='F1';
- [Xmin,Xmax,dim,fobj] = fun_info(F);%获取函数信息
- pop=50;%种群大小(可以自己修改)
- maxgen=200;%最大迭代次数(可以自己修改)
- [fMin,bestX,ConvergenceCurve] = GRO(pop, maxgen,Xmin,Xmax,dim,fobj);
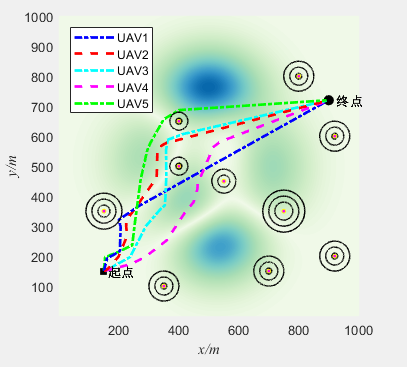
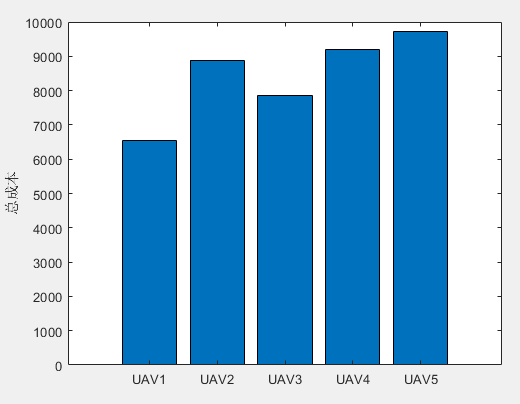
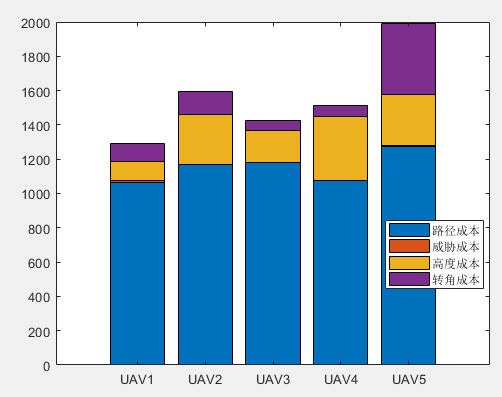
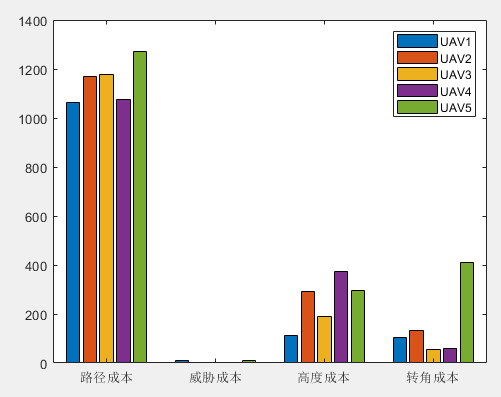
无人机集群路径规划
部分结果: