
热门标签
热门文章
- 1全国区块链职业技能大赛国赛考题前端功能开发
- 2基于springboot+vue.js+uniapp小程序的个人驾校预约管理系统附带文章源码部署视频讲解等
- 3mac电脑配置flutter完整详细的流程_mac配置flutter
- 4git报错: Access token is expired fatal: unable to access https://gitee.com/_remote: [session-1f460f9a] oauth: access token is
- 5【在 Windows系统中为 git 命令设置代理(v2rayN)】_windows git proxy
- 6阿里云数据盘挂载_阿里云查看数据盘
- 72024 年适用于 Linux 的 5 个微软 Word 替代品_word linux
- 8SpringBoot 文件格式转换_spring-boot实现文档格式转换
- 9DataNode_数据节点(datanode)负责存储数据,一个数据块会在多个datanode中进行冗余备份,那么
- 10NodeManager代码分析之NodeManager启动过程
当前位置: article > 正文
无人驾驶(移动机器人)路径规划之A star(Tie Breaker)算法及其matlab实现_机器人路径规划算法代码
作者:盐析白兔 | 2024-07-18 09:59:54
赞
踩
机器人路径规划算法代码
在自动驾驶与移动机器人路径规划时,必定会用到经典的算法A star。下面是我未加入与加入Tie Breaker 的matlab实现效果。可以发现加入Tie Breaker之后效果明显改善。
目录
1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
2.加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
一、效果比较
1.未加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
代码链接:
移动机器人自主路径规划之Astar算法MATLAB实现代码资源-CSDN文库
(1)原始地图信息。
(2)规划地图信息

(3)路径信息
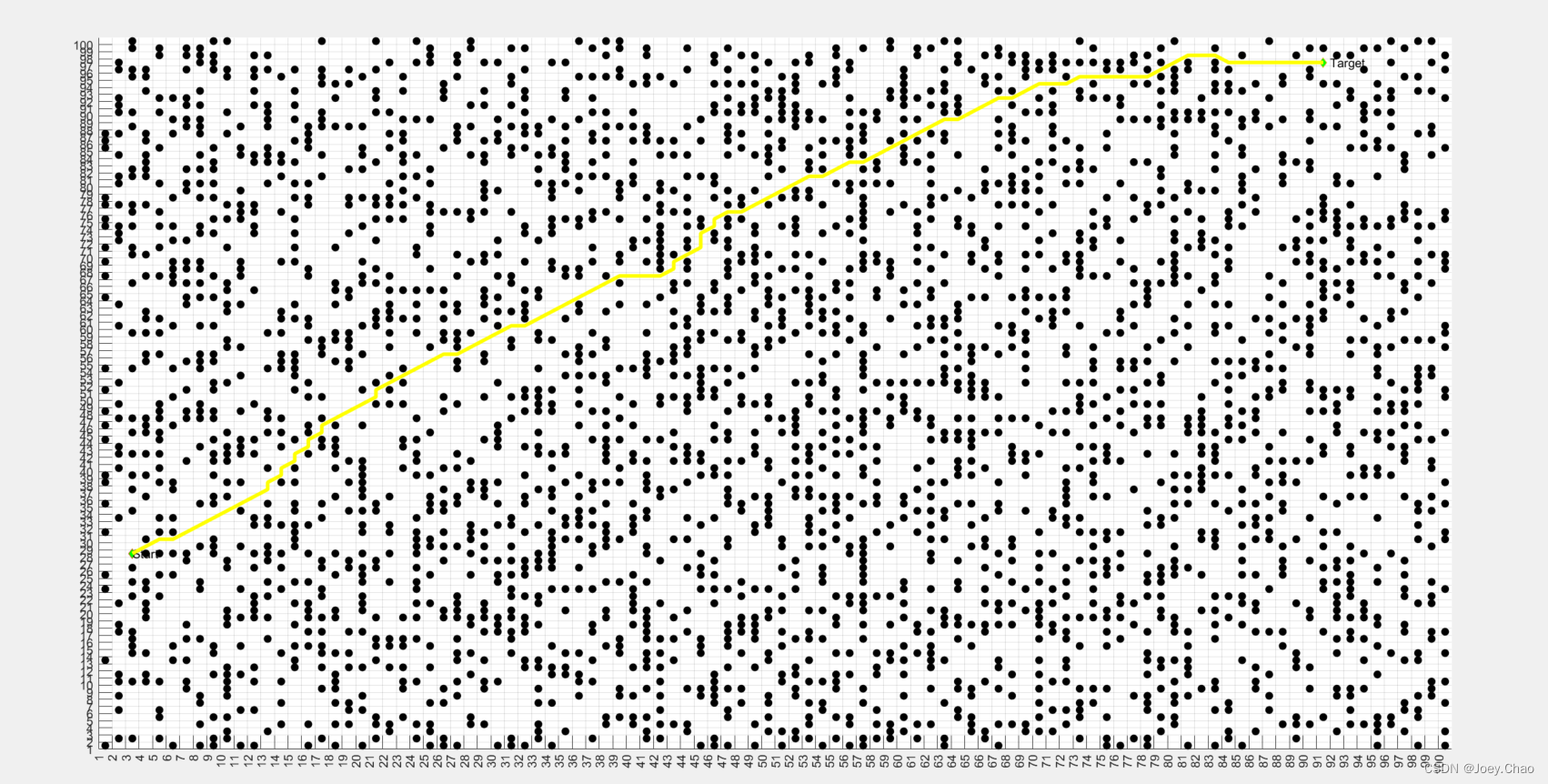
2.加入Tie Breaker(黑色为障碍物,菱形绿色为目标点与起始点,红色为close,绿色为open,黄色为最终路径)
- 声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/盐析白兔/article/detail/844884推荐阅读
相关标签
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

