- 1【开发环境】VSCode 安装插件 ( 简体中文插件 | Open in Browser 插件 | Auto Rename Tag 插件 | JS-CSS-HTML Formatter 插件 )_vscode安装插件
- 2vmware升级处理vib包冲突的问题
- 3FPGA串口接收解帧、并逐帧发送有效数据——1_串口数据处理状态机
- 4超详细解决方案:在与 SQL Server 建立连接时出现与网络相关的或特定于实例的错误。_在与sqlserver建立连接时出现与网络相关的
- 5ChatGLM-6B部署和微调实例_chatglm 微调 流程图
- 6WSL win11下 Linux 子系统安装 无法解析服务器的名称或地址_适用于 linux 的 windows 子系统已安装。 无法解析服务器的名称或地址
- 7七天入门大模型 :大模型量化及低成本部署最佳实践
- 8linux下如何下载软件以及如何git_linux软件下载
- 9JavaWeb学习笔记——javascript_javascriptjava成熟 欢迎您
- 10Python 对象的list 快速按照属性查找_python class存入list中如何查找
FMCW雷达信号处理学习_fmcw信号处理
赞
踩
最近在做生物雷达相关东西,学习了一些毫米波雷达信号处理相关的知识,在这里总结一下
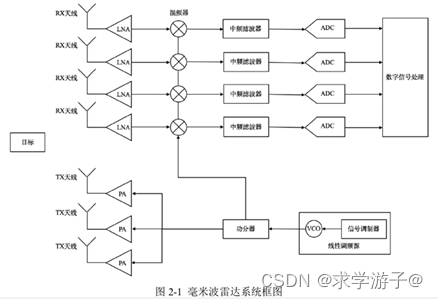
毫米波雷达系统介绍
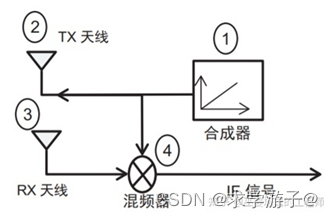
典型的雷达系统结构主要包含天线孔径、射频前端和数字后端三大部分。上图是一个单发射天线,单接受天线的毫米波雷达。实际应用中大多采用多发多收,如TI的IWR系列三发射天线、四接受天线等。以上图为例,线性调频信号源生成一个线性调频脉冲,该线性调频脉冲由发射天线(TX天线)发射,目标物体对该线性调频脉冲的反射生成一个由接收天线(RX天线)捕捉的反射线性调频脉冲。混频器将 RX 和 TX 信号合并到一起,生成一个中频 (IF) 信号。目标物体的信息,比如距离,速度,角度都包含在这些IF信号中。通过对IF信号进行多次傅里叶变换,即可将这些信息分离出来。
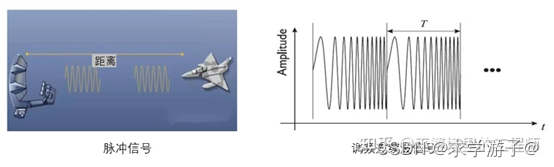
雷达通常分为带或不带调制的连续波雷达(CW)和脉冲雷达。
脉冲雷达发射短脉冲信号序列来估计移动目标的距离和径向速度,目标与雷达传感器的距离是使用发射和截获脉冲之间经过的时间延迟来计算的。
连续波雷达通过发射恒定的未调制频率来测量目标径向速度,但没有距离信息。CW雷达天线发射的具有特定频率的信号在从目标反射回来后被截获,其频率的变化称为多普勒频移。速度信息是根据雷达和目标之间的运动表现出的多普勒效应来估计的。
线性调频连续(LFMCW)波形是另一种重要的雷达波形方案,与连续波不同,发射波形信号频率被调制,以高分辨率同时估计目标的距离和径向速度。本文目标主要为调频连续波雷达(FMCW)。
FMCW信号处理过程
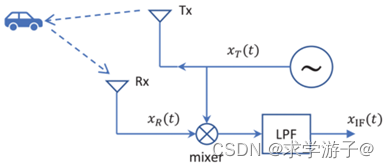
在介绍具体的信号处理过程之前,有必要先来讲一下FMCW雷达的信号是如何生成的。这个流程大致分为4步。
1、 合成器生成一个连续调频脉冲。
2、 发射天线(TX)发射连续调频脉冲。
3、 接收天线(RX)捕获目标对连续调频脉冲的反射。
4、 混频器将RX和TX信号合并到一起,生成一个中频(IF)信号
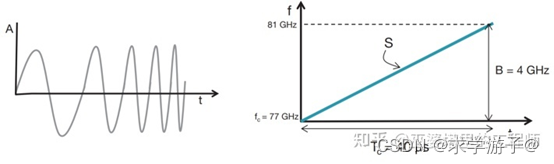
合成器负责生成连续调频脉冲,如下图所示,在一个脉冲的时间范围内,信号的频率随时间线性升高(线性调频脉冲)。当然也可以有别的变化方式,总之信号的频率是变化的。在下图的例子中,信号的起始频率fc为77GHz,在一个脉冲的时间Tc(通常也称之为一个Chirp,这里是40μs)内线性升高到81GHz。在一个Chirp时间内频率变化的范围就是该雷达的带宽B(这里是4GHz),而频率的变化率则记为S(4GHz/40μs=100MHz/μs)。
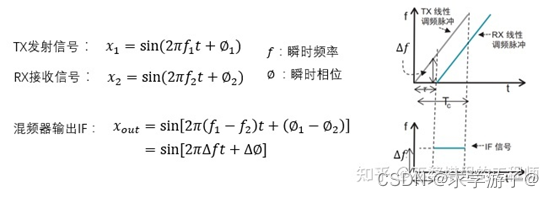
混频器将发射和接收信号进行混合,得到一个具有新频率的信号,称之为中频信号(IF)。如下图所示,接收信号和发射信号的频率和相位都是不同的(由目标的距离和速度决定,后面会详细介绍)。混频器将这两个信号叠加,得到的中频信号具有新的频率和相位,分别对应发射和接收信号的频率差∆f和相位差∆∅。后续所有的信号处理都是在这个中频信号的基础上来完成的。信号处理的任务是从中频信号中解析出目标的距离(对应∆f),速度(对应∆∅)和角度(对应多个接收天线)。
介绍完信号处理过程之后便是如何从原始IF中频信号中计算出速度、距离、方位角,这部分网上有很多资料介绍了,距离主要通过频率来计算,速度则是利用相位,方位角则是需要多个接收天线,这部分可以看一下TI的FMCW雷达手册,写的比较详细,这里我就不一一推导了。
深度学习中的FMCW信号预处理
生物雷达领域近些年有一个热门的方向,毫米波雷达姿态识别或者行人身份识别,在智能家居、交通检测领域有着很大的潜力,如果对相关领域有研究的同学可能知道,在将深度学习与FMCW雷达姿态识别相结合时,常常会用到一些微多普勒频谱图(Micro-Doppler)、距离速度图(Range-velocity)等作为深度学习的输入,为了得到这种类型的数据输入,通常需要对原始雷达信号做预处理,这部分就着重讲一下如何得到这些数据输入。
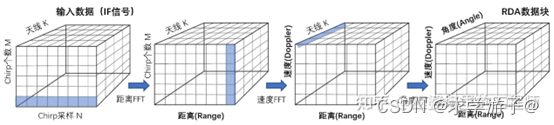
首先,发射天线在每一帧中都会发出M个Chirp的信号,每个Chirp的采样个数为N。同时,K个接收天线会收到K组返回信号,混频器将它们与发射信号混合后得到中频信号IF。IF信号是三维的数据块KxMxN,对其进行三次FFT操作,就可以解析出目标的距离,速度和角度。最后得到的RAD数据块就是之前在介绍毫米波雷达感知算法时所采用的稠密底层数据。当然,有的算法也会采用神经网络来替代FFT。比如说保留Chirp维度,采用神经网络来提取速度信息。或者保留天线维度,采用神经网络来提取角度信息。
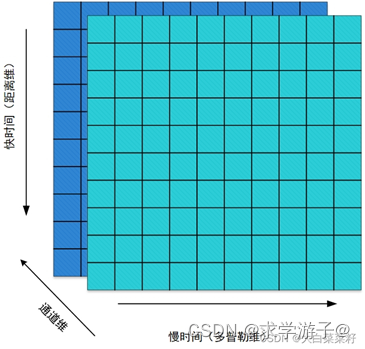
有时我们也会用快时间维慢时间维通道维来表示一个雷达信号,快时间维是每个信号每个周期的采样点数,采样点数=采样时间乘以采样频率。慢时间维就是发射的脉冲(chirp)个数(可以自己设定,根据每帧多少个脉冲,发射多少帧这样,不过不重要)。
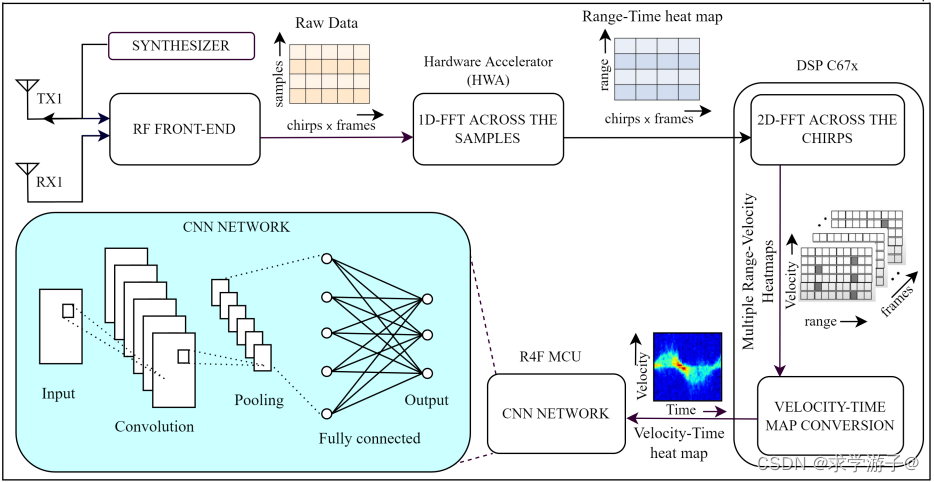
微多普勒特征图的提取
微多普勒特征图(MD图)的提取方式并不唯一,这里我们介绍一种较为常用的方式,如下图所示,首先对原始的雷达Cube快时间维做一维FFT,得到一个Range-Time 热图,通过FFT将其距离信息分离出来,通常在这一过程中还会加入MTI处理,MTI本质就是个频域滤波器:可以抑制固定目标和慢速杂波。然后再沿着它的慢时间维做二维FFT(有些文章里采用STFT)得到多个距离-速度图(Range-Velocity)将其在通道维(frame)上进行累加得到我们所需要的微多普勒特征图(MD图)