
- 1linux Centos 7 在tp5.1上Swoole的搭建IM_tp5.1 im
- 2python aes 128 gcm 防沉迷身份认证_aes gcm128 tag
- 3sqlalchemy和flask-sqlalchemy查询结果转json
- 4ts11_pmdarima_edgecolor_bokeh plotly_Prophet_Fourier_VAR_endog exog_Granger causality_IRF_Garch vola_layout.xaxis.rangebreaks
- 5Vscode 搭建 Golang 项目_vscode新建go
- 6张量的通俗理解
- 7Java开发中常用的Linux命令:ps_ps -ef|grep java
- 8前段报错:net::ERR_CONNECTION_REFUSED_neterrconnectionrefused的原因
- 9自然语言处理——基于预训练模型的方法——第6章 动态词向量预训练模型
- 10什么是单元测试?谁来做?怎么写?
【物联网】I2C(IIC)通信协议详解与应用_iic通信协议
赞
踩
目录
第一部分:I2C的工作原理
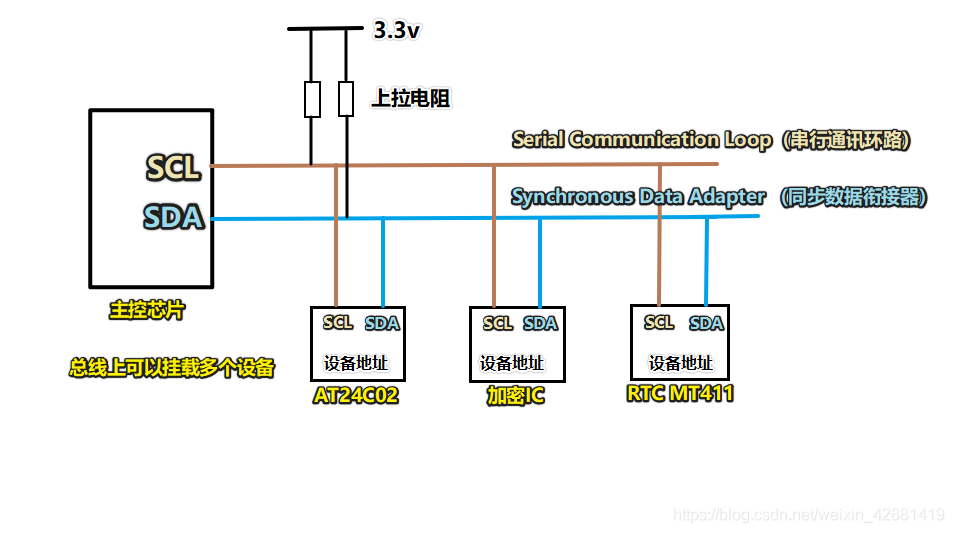
I2C是一种双线制串行通信协议,由两条线构成:时钟线(SCL)和数据线(SDA)。它使用一种主从结构,其中有一个主设备(Master)和一个或多个从设备(Slave)。主设备控制通信过程,而从设备被动地接受主设备的控制并进行数据的发送和接收。下面是I2C通信的基本步骤:
1. 主设备发送一个开始信号,表示开始通信。
2. 主设备发送一个从设备的地址和读/写位。地址用于选中特定的从设备,读/写位用于指示数据的方向(读或写)。
3. 选中的从设备确认收到地址并发送应答信号。
4. 主设备继续发送或接收数据。
5. 数据传输完成后,主设备发送停止信号,表示通信结束。
第二部分:I2C的特性
1. 双向通信: I2C支持双向数据传输,即主设备既可以发送数据给从设备,也可以接收从设备发送的数据。
2. 多主模式: I2C允许多个主设备连接到同一条总线上,通过仲裁机制来选择唯一的主设备进行通信,其余的主设备则成为从设备。
3. 多从模式: I2C总线可连接多个从设备,每个从设备都有唯一的7位或10位地址,主设备通过地址来选择要与之通信的从设备。
4. 速率灵活: I2C总线的速率可以根据应用需求进行灵活调整,常见的速率有100 kHz、400 kHz和1 MHz。
5. 低成本: I2C总线只需要两根线来进行通信,降低了硬件成本和复杂性。
第三部分:I2C的应用场景
1. 传感器与微控制器之间的通信: I2C协议常被用于传感器与微控制器之间的通信,例如温度传感器、湿度传感器、加速度计等。传感器作为从设备连接到总线上,微控制器作为主设备进行数据采集和控制。
2. 存储器芯片: I2C被用于与存储器芯片(如EEPROM和RTC芯片)进行通信,实现数据的读写和时钟的管理。

3. 控制外设设备: I2C可以用于与各种外围设备进行通信,如LED驱动器、LCD控制器、扩展IO芯片等,实现控制和数据传输。
4. 显示器控制器: 很多液晶显示器控制器也使用I2C协议进行配置和控制,如OLED显示屏、液晶显示模块等。
5. 工业自动化领域: I2C在工业自动化领域广泛应用,例如工业传感器、PLC等。
第四部分:I2C的注意事项
1. 电平兼容性: 主设备和从设备的电平必须兼容,以确保正常的通信。请注意检查数据手册,了解电平要求并进行必要的电平转换。
2. 电容和电阻: I2C总线上的电容和电阻对通信速度和稳定性有重要影响。确保总线上的负载电容和上拉电阻的数值符合设备规范,以避免通信问题。
3. 时钟速率选择: 选择合适的时钟速率,以兼顾通信速度和系统稳定性。过高的时钟速率可能导致通信误差,而过低的时钟速率则会降低通信效率。
4. 仲裁机制: 当多个主设备同时尝试访问总线时,I2C使用仲裁机制来决定哪个设备能够继续进行通信,其他设备则等待。
5. 异常处理: I2C通信过程中可能发生异常,如从设备无响应、通信超时等。在编写代码时,要考虑异常处理机制,以确保系统能够正确处理这些异常情况。
第五部分:I2C的通信过程
I2C(IIC)通信过程是由一系列的状态和操作组成的。在这里,我将详细解释每个步骤的细节。
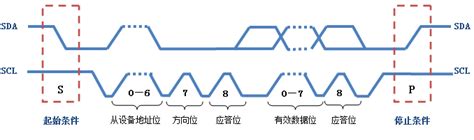
1. 开始信号(Start Signal):通信开始时,主设备发送一个低电平的SCL时钟脉冲,然后再发送一个低电平的SDA数据线脉冲。这个SDA的下降沿表示I2C总线上的一个开始信号,表明接下来是一次新的通信。
2. 从设备地址和读/写位传输:主设备发送从设备地址到I2C总线。I2C地址由7位或10位组成,取决于使用的设备。地址的最低位用于指示读(1)或写(0)操作。主设备发送地址后,等待从设备的应答。
3. 仲裁机制和应答(Acknowledge):从设备收到地址后,它以一个低电平的SDA应答位来确认接收到地址。主设备检测到这个应答位,以确定从设备是否存在。如果从设备存在并正确收到地址,则发送一个应答(0)信号;如果未正确接收到地址,则不发送应答(1)信号。
4. 数据传输:在确认通信目标后,主设备将发送或接收数据。数据传输是在每个时钟周期的上升沿或下降沿进行的。
a. 主设备发送数据:主设备将要发送的数据位(8位或更多)依次发送到SDA线上,并在每个时钟周期上升沿时更新数据。从设备在每个时钟周期下降沿时接收数据,并在接收之后发送应答位来确认是否接收正确。
b. 从设备接收数据:从设备在每个时钟周期上升沿时接收到的数据位,并将其保存在接收缓冲区中。主设备通过在每个时钟周期的下降沿时发送应答位来确认是否将更多数据发送给从设备。
5. 停止信号(Stop Signal):通信完成后,主设备发送一个停止信号,它由一个高电平的SCL时钟脉冲和一个高电平的SDA数据线脉冲组成。这个SDA的上升沿表示I2C总线上的一个停止信号,表明通信结束。
第六部分:单片机实现I2C
1. 51单片机实现I2C
1. 物理连接:将51单片机的SCL引脚连接到I2C总线的时钟线上(一般为SCL线),将51单片机的SDA引脚连接到I2C总线的数据线上(通常为SDA线)。另外,还需要将上拉电阻连接到SCL和SDA引脚以保证信号的稳定。
2. 软件库:51单片机使用的是C语言编程,您可以使用官方提供的编译器和开发工具或者第三方的开发环境。另外,您需要使用相应的I2C软件库来进行I2C通信的编程。
3. 初始化配置:在使用I2C之前,您需要配置相关的寄存器和参数来初始化I2C接口。这包括设置I2C时钟频率、选择主从模式、设置地址、使能I2C等。
4. 数据传输:在初始化完成后,您可以使用相应的函数来发送和接收数据。对于51单片机,通常使用独立的函数来发送和接收字节数据,并进行必要的应答过程。
5. 异常处理:在I2C通信过程中,可能会发生一些异常情况,如仲裁错误、设备未响应等。您需要在编程时考虑如何处理这些异常情况,例如增加超时处理、重新发送数据等。
示例代码:
- #include <reg51.h>
-
- sbit SCL = P2^0; // 定义I2C总线的时钟线引脚
- sbit SDA = P2^1; // 定义I2C总线的数据线引脚
-
- void I2C_Start() {
- SDA = 1;
- SCL = 1;
- SDA = 0;
- SCL = 0;
- }
-
- void I2C_Stop() {
- SDA = 0;
- SCL = 1;
- SDA = 1;
- }
-
- void I2C_Write(unsigned char dat) {
- unsigned char i;
- for (i = 0; i < 8; i++) {
- SDA = dat & 0x80; // 发送数据的最高位
- SCL = 1;
- SCL = 0;
- dat <<= 1; // 左移一位,发送下一位数据
- }
- }
-
- unsigned char I2C_Read() {
- unsigned char i, dat = 0;
- SDA = 1; // 准备接收数据
- for (i = 0; i < 8; i++) {
- dat <<= 1; // 左移一位,接收数据的最高位
- SCL = 1;
- dat |= SDA; // 读取数据位
- SCL = 0;
- }
- return dat;
- }
-
- void main() {
- unsigned char receivedData;
-
- // 初始化I2C总线
-
- I2C_Start(); // 发送启动信号
- I2C_Write(0xA0); // 发送从设备地址和写位
- I2C_Write(0x01); // 发送数据
- I2C_Write(0x02); // 发送数据
- I2C_Stop(); // 发送停止信号
-
- // 接收数据
- I2C_Start(); // 发送启动信号
- I2C_Write(0xA1); // 发送从设备地址和读位
- receivedData = I2C_Read(); // 读取数据
- I2C_Stop(); // 发送停止信号
-
- // 处理接收到的数据
-
- while (1);
- }
2. STM32使用标准库实现I2C
1. 配置引脚:首先,您需要配置I2C引脚的GPIO和复用功能。具体的引脚分配取决于您所使用的STM32型号,请参考芯片的数据手册来了解正确的引脚配置。
2. 初始化I2C外设:使用SPL提供的函数来初始化I2C外设。这个过程涉及到I2C时钟频率、寄存器设置和其他参数的配置。具体的函数名称和参数可能会因具体的STM32型号而有所不同,请参考SPL库的文档来获取正确的函数调用和参数设置。
3. 发送和接收数据:一旦I2C外设初始化完成,您就可以使用相应的函数来发送和接收数据。
- 发送数据:使用`I2C_SendData()`函数将数据发送到I2C总线。
- 接收数据:使用`I2C_ReceiveData()`函数从I2C总线接收数据。
4. 异常处理:在I2C通信过程中,可能会出现超时、仲裁错误、设备无响应等异常情况。您需要考虑如何处理这些异常情况,例如增加超时机制、重新发送数据等。
示例代码:
- #include "stm32xxxxx.h"
-
- void SystemClock_Config()
- {
- // 配置系统时钟
- // ...
- }
-
- void GPIO_Configuration()
- {
- GPIO_InitTypeDef GPIO_InitStructure;
-
- // 配置I2C引脚的GPIO和复用功能
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_OD;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_Init(GPIOB, &GPIO_InitStructure);
-
- // 打开GPIOB的时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
- }
-
- void I2C_Configuration()
- {
- I2C_InitTypeDef I2C_InitStructure;
-
- // 打开I2C1的时钟
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_I2C1, ENABLE);
-
- // 配置I2C外设的初始化参数
- I2C_InitStructure.I2C_Mode = I2C_Mode_I2C;
- I2C_InitStructure.I2C_DutyCycle = I2C_DutyCycle_2;
- I2C_InitStructure.I2C_OwnAddress1 = 0x00;
- I2C_InitStructure.I2C_Ack = I2C_Ack_Enable;
- I2C_InitStructure.I2C_AcknowledgedAddress = I2C_AcknowledgedAddress_7bit;
- I2C_InitStructure.I2C_ClockSpeed = 100000; // 设置I2C时钟频率(100kHz)
-
- // 初始化I2C外设
- I2C_Init(I2C1, &I2C_InitStructure);
-
- // 使能I2C外设
- I2C_Cmd(I2C1, ENABLE);
- }
-
- void I2C_SendData(uint8_t address, uint8_t* pData, uint16_t length)
- {
- // 发送启动信号
- I2C_GenerateSTART(I2C1, ENABLE);
-
- // 等待启动信号发送完成
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
-
- // 发送从设备地址和写位
- I2C_Send7bitAddress(I2C1, address, I2C_Direction_Transmitter);
-
- // 等待从设备地址发送完成和应答接收
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED));
-
- // 发送数据
- while (length--)
- {
- I2C_SendData(I2C1, *pData++);
- // 等待数据发送完成
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_TRANSMITTED));
- }
-
- // 发送停止信号
- I2C_GenerateSTOP(I2C1, ENABLE);
- }
-
- void I2C_ReceiveData(uint8_t address, uint8_t* pBuffer, uint16_t length)
- {
- // 发送启动信号
- I2C_GenerateSTART(I2C1, ENABLE);
-
- // 等待启动信号发送完成
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_MODE_SELECT));
-
- // 发送从设备地址和读位
- I2C_Send7bitAddress(I2C1, address, I2C_Direction_Receiver);
- // 等待从设备地址发送完成和应答接收
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED));
-
- // 接收数据
- while (length--)
- {
- if (length == 0)
- {
- // 最后一个数据,禁用应答
- I2C_AcknowledgeConfig(I2C1, DISABLE);
- }
-
- // 等待数据接收完成
- while (!I2C_CheckEvent(I2C1, I2C_EVENT_MASTER_BYTE_RECEIVED));
-
- *pBuffer++ = I2C_ReceiveData(I2C1);
- }
-
- // 发送停止信号
- I2C_GenerateSTOP(I2C1, ENABLE);
- }
-
- int main(void)
- {
- uint8_t sendData[] = {0x01, 0x02, 0x03};
- uint8_t receiveData[3];
-
- // 初始化系统时钟
- SystemClock_Config();
-
- // 配置GPIO引脚
- GPIO_Configuration();
-
- // 配置I2C外设
- I2C_Configuration();
-
- // 发送数据
- I2C_SendData(DeviceAddress, sendData, sizeof(sendData));
-
- // 延时等待数据发送完成
- for (uint32_t i = 0; i < 100000; i++);
-
- // 接收数据
- I2C_ReceiveData(DeviceAddress, receiveData, sizeof(receiveData));
-
- while (1)
- {
- // 主程序逻辑
- }
- }
3. STM32使用HAL库实现I2C
示例代码:
- #include "stm32xxxxx.h"
- #include "stm32xxxxx_hal.h"
-
- I2C_HandleTypeDef hi2c1;
-
- void SystemClock_Config()
- {
- // 配置系统时钟
- // ...
- }
-
- void GPIO_Configuration()
- {
- // 配置GPIO引脚
- // ...
- }
-
- void I2C_Configuration()
- {
- // 配置I2C外设
- hi2c1.Instance = I2C1;
- hi2c1.Init.Timing = 0x00303D5B; // 根据具体系统时钟和I2C时钟频率调整这个值
- hi2c1.Init.OwnAddress1 = 0;
- hi2c1.Init.AddressingMode = I2C_ADDRESSINGMODE_7BIT;
- hi2c1.Init.DualAddressMode = I2C_DUALADDRESS_DISABLE;
- hi2c1.Init.OwnAddress2 = 0;
- hi2c1.Init.GeneralCallMode = I2C_GENERALCALL_DISABLE;
- hi2c1.Init.NoStretchMode = I2C_NOSTRETCH_DISABLE;
-
- // 初始化I2C外设
- HAL_I2C_Init(&hi2c1);
- }
-
- int main(void)
- {
- uint8_t sendData[] = {0x01, 0x02, 0x03};
- uint8_t receiveData[3];
-
- // 初始化系统时钟
- SystemClock_Config();
-
- // 配置GPIO引脚
- GPIO_Configuration();
-
- // 配置I2C外设
- I2C_Configuration();
-
- // 发送数据
- HAL_I2C_Master_Transmit(&hi2c1, DeviceAddress, sendData, sizeof(sendData), HAL_MAX_DELAY);
-
- // 延时等待数据发送完成
- HAL_Delay(1); // 根据实际情况调整延时时间
-
- // 接收数据
- HAL_I2C_Master_Receive(&hi2c1, DeviceAddress, receiveData, sizeof(receiveData), HAL_MAX_DELAY);
-
- while (1)
- {
- // 主程序逻辑
- }
- }
在这个示例代码中,您需要根据实际情况配置系统时钟、GPIO引脚和I2C外设。I2C_Configuration()函数用于配置I2C外设并使用`HAL_I2C_Init()`进行初始化。而在主函数中,我们使用`HAL_I2C_Master_Transmit()`函数来发送数据,使用`HAL_I2C_Master_Receive()`函数来接收数据。
第七部分:总结
1. 基本原理:I2C通信使用两条线路,分别为时钟线(SCL)和数据线(SDA)。所有设备共享这两条线路,通过地址来区分每个设备。数据在时钟信号的同步下通过数据线传输。
2. 设备角色:I2C通信协议中的设备可以分为两类:主设备(Master)和从设备(Slave)。主设备负责发起通信和控制传输过程,而从设备被动地响应主设备的指令。
3. 起始和停止条件:I2C通信以起始和停止条件作为传输的开始和结束。起始条件是由主设备发出的,在时钟保持高电平时,数据线从高电平跳变到低电平。停止条件也是由主设备发出的,在时钟保持高电平时,数据线从低电平跳变到高电平。
4. 信号传输:I2C通信使用字节为单位进行数据传输。在每个字节的传输中,数据线上的每个位(8位)都在时钟信号的上升沿或下降沿更新。
5. 地址选择:每个I2C设备都有一个唯一的地址,用于在总线上识别该设备。主设备通过发送地址来选择要与之通信的从设备。
6. 速度控制:I2C通信的速度可以通过更改时钟速率来控制。通常有标准模式(100 kbit/s)和快速模式(400 kbit/s)两种速率可选,还有更高速的模式可用。
7. 错误检测:I2C通信机制中没有内建的错误检测和纠正机制。错误通常通过软件或硬件来检测和处理。
总的来说,I2C是一种简单、灵活的串行通信协议,适用于连接多个集成电路之间的通信,并被广泛应用于各种设备和系统中。

