
- 1HarmonyOS Stage模型 UIAbility生命周期状态_uiability的生命周期有哪几个状态?
- 2数字电路基础知识——组合逻辑电路之乘法器的设计(一)—— 并行、移位相加、加法树、查找表乘法器_乘法器电路图
- 3linux系统切换gcc版本
- 4【Spring Boot学习总结】6.SpringBoot全局配置文件_spring boot配置文件统一
- 5opencv 图像识别
- 6计算机专业对口升学考哪些科目,对口升学考试科目
- 7harmonyOS编译流程_harmony os build
- 8AIGC专题:AGI里程碑时刻,Sora打造全球新标杆
- 9进程和线程上下文切换cpu花销问题_线程上下文切换开销
- 10华为怎么用手机看时间到读秒_鸿蒙确认上线时间?华为宣布这几款手机无法升级,看有没有你的...
Matlab中filter函数用法_matlab filter
赞
踩
目录
filter函数的功能是对数据进行1 维数字滤波。
语法
- y = filter(b,a,x)
-
- y = filter(b,a,x,zi)
-
- y = filter(b,a,x,zi,dim)
-
- [y,zf] = filter(___)
说明
y = filter(b,a,x) 使用由分子和分母系数 b 和 a 定义的有理传递函数对输入数据 x 进行滤波。
如果 a(1) 不等于 1,则 filter 按 a(1) 对滤波器系数进行归一化。因此,a(1) 必须是非零值。
-
如果 x 为向量,则 filter 将滤波后数据以大小与 x 相同的向量形式返回。
-
如果 x 为矩阵,则 filter 沿着第一维度操作并返回每列的滤波后的数据。
-
如果 x 为多维数组,则 filter 沿大小不等于 1 的第一个数组维度进行计算。如果 x 为多维数组,则 filter 沿大小不等于 1 的第一个数组维度进行计算。
y = filter(b,a,x,zi) 将初始条件 zi 用于滤波器延迟。zi 的长度必须等于 max(length(a),length(b))-1。
y = filter(b,a,x,zi,dim) 沿维度 dim 进行计算。例如,如果 x 为矩阵,则 filter(b,a,x,zi,2) 返回每行滤波后的数据。
[y,zf] = filter(___) 还使用任一上述语法返回滤波器延迟的最终条件 zf。
示例
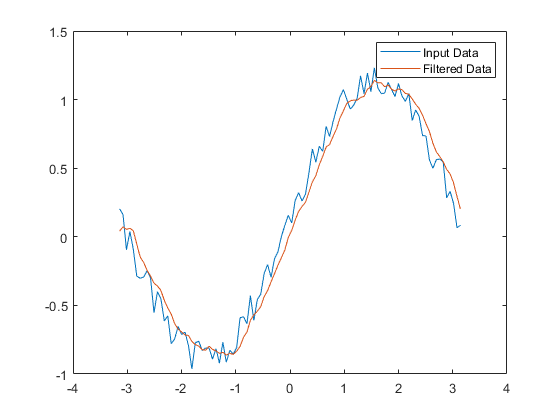
移动平均滤波器
移动平均滤波器是用于对含噪数据进行平滑处理的常用方法。此示例使用filter函数计算沿数据向量的平均值。创建一个由正弦曲线数据组成的1×100行向量,其中的正弦曲线被随机干扰所损坏。
- t = linspace(-pi,pi,100);
- rng default %initialize random number generator
- x = sin(t) + 0.25*rand(size(t));
移动平均值滤波器沿数据移动长度为windowSize的窗口,并计算每个窗口中包含的数据的平均值。以下差分方程定义向量 x 的移动平均值滤波器:
![]()
窗口大小为 5 时,计算有理传递函数的分子和分母系数。
- windowSize = 5;
- b = (1/windowSize)*ones(1,windowSize);
- a = 1;
求数据的移动平均值,并绘制其对原始数据的图。
- y = filter(b,a,x);
-
- plot(t,x)
- hold on
- plot(t,y)
- legend('Input Data','Filtered Data')
如图所示:
对矩阵行进行滤波
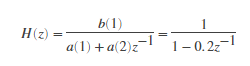
此示例使用以下有理传递函数对数据的矩阵进行滤波。
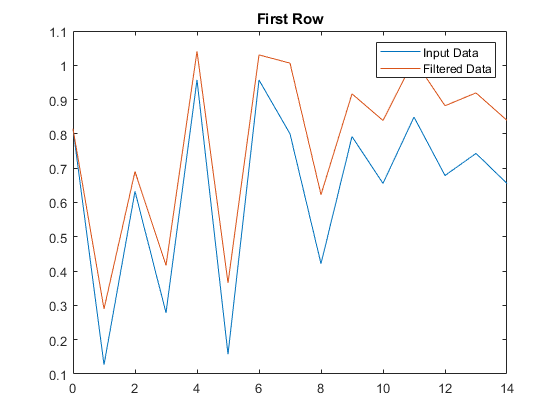
创建一个由随机输入数据组成的2×15矩阵。
- rng default %initialize random number generator
- x = rand(2,15);
定义有理传递函数的分子和分母系数。
- b = 1;
- a = [1 -0.2];
沿着x的第二维度应用传递函数并返回每行的一维数字滤波结果。绘制原始数据的第一行对已滤波数据的图。
- y = filter(b,a,x,[],2);
-
- t = 0:length(x)-1; %index vector
- plot(t,x(1,:))
- hold on
- plot(t,y(1,:))
- legend('Input Data','Filtered Data')
- title('First Row')
如图所示:
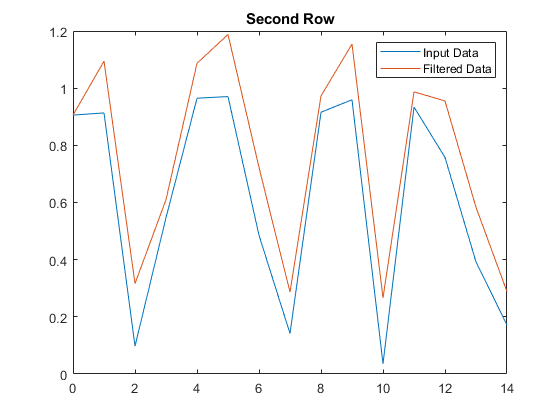
绘制输入数据的第二行对已滤波数据的图。
- figure
- plot(t,x(2,:))
- hold on
- plot(t,y(2,:))
- legend('Input Data','Filtered Data')
- title('Second Row')
如图所示:
对各部分中的数据进行滤波
使用滤波器延迟的初始条件和最终条件对各部分中的数据进行滤波,尤其是需要考虑内存限制时请执行此操作。生成一个大型的随机数据序列并将其拆分为两段:x1 和 x2。
- x = randn(10000,1);
-
- x1 = x(1:5000);
- x2 = x(5001:end);
整个序列 x 是 x1 和 x2 的垂直串联。定义有理传递函数的分子和分母系数,
- b = [2,3];
- a = [1,0.2];
对子序列 x1 和 x2 进行滤波,一次一个。输出对 x1 进行滤波的最终条件,以便在第一段末尾存储滤波器的内部状态。
[y1,zf] = filter(b,a,x1);将对 x1 进行滤波的最终条件用作对第二段也就是 x2 进行滤波的初始条件。
y2 = filter(b,a,x2,zf);y1 是来自x1的滤波后的数据,而y2是来自x2的滤波后的数据。整个滤波后的序列是y1和y2的垂直串联。同时对整个序列进行滤波以供比较。
- y = filter(b,a,x);
-
- isequal(y,[y1;y2])
-
-
- ans = logical
- 1
b- 有理传递函数的分子系数
有理传递函数的分子系数,指定为向量。
a- 有理传递函数的分母系数
有理传递函数的分母系数,指定为向量。
x- 输入数据
输入数据,指定为向量、矩阵或多维数组。
zi- 滤波器延迟的初始条件
滤波器延迟的初始条件,指定为向量、矩阵或多维数组。
-
如果 zi 是向量,则它的长度必须是 max(length(a),length(b))-1。
-
如果 zi 是矩阵或多维数组,则主维度的大小必须为 max(length(a),length(b))-1。剩余的每个维度的大小必须与 x 的相应维度的大小匹配。例如,假设沿 3×4×5 数组 x 的第二个维度 (dim = 2) 使用 filter。数组 zi 的大小必须为 [max(length(a),length(b))-1]×3×5。
由 [] 指定的默认值将所有滤波器延迟初始化为零。
dim- 沿其运算的维度
沿其运算的维度,指定为正整数标量。如果未指定值,则默认值是大小不等于 1 的第一个数组维度。以一个二维输入数组 x 为例。
-
如果 dim = 1,则 filter(b,a,x,zi,1) 沿着 x 的行进行计算并返回应用于每列的滤波器。
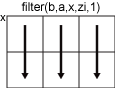
-
如果 dim = 2,则 filter(b,a,x,zi,2) 沿 x 的列进行计算,并返回应用于每一行的滤波器。
如果 dim 大于 ndims(x),则 filter 返回 x。
y- 滤波后的数据
滤波后的数据,以向量、矩阵或大小与输入数组 x 相同的多维数组的形式返回。如果 x 的类型为 single,则 filter 本身以单精度进行计算,y 的类型也是 single。否则,y 以 double 类型返回。
zf- 滤波器延迟的最终条件
滤波器延迟的最终条件,以向量、矩阵或多维数组的形式返回。
-
如果x是一个向量,则zf是长度为max(length(a),length(b))-1的列向量。
-
如果x是矩阵或多维数组,则 zf 是长度为 max(length(a),length(b))-1的列向量数组,其中zf中的列数等于x中的列数。例如,假设沿3×4×5数组x的第二个维度 (dim = 2) 使用filter。数组zf 的大小为 [max(length(a),length(b))-1]×3×5。
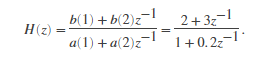
有理传递函数
Z变换域中这种 filter 运算的输入-输出说明是一种有理传递函数。有理传递函数采用如下形式:

可同时处理FIR和IIR滤波器[1]。na是反馈滤波器阶数,nb是前馈滤波器阶数。由于归一化,假定a(1) = 1。还可以将有理传递函数表示为以下差分方程:

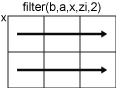
此外,也可以使用如下图所示的 direct-form II 转置实现表示有理传递函数。此处,na = nb。

filter在样本 m 处的运算由时域差分方程给定
提示
-
如果有 Signal Processing Toolbox™,请将 y = filter(d,x) 与digitalFilter(Signal Processing Toolbox) 对象d结合使用来对输入信号x进行滤波。要根据频率响应设定生成d,可以使用designfilt (Signal Processing Toolbox)。
-
如果有 DSP System Toolbox™,将 y = filter(dObj,x) 与 dfilt (DSP System Toolbox) 对象 dObj 结合使用来对输入信号 x 进行滤波。
-
要将 filter函数与来自 FIR 滤波器的b系数结合使用,请使用 y = filter(b,1,x)。
-
有关滤波函数的详细信息,可以参考数字滤波(Signal Processing Toolbox)。

