- 1error: Cannot delete branch 'xxx' checked out at 'xxxx'
- 2华为OD机试 - 内存资源分配(Java & JS & Python & C)_華為od機試 資源池 伏城
- 3毕业论文 | 基于STM32的MPU6050程序设计(源码)——卡尔曼滤波_stm32 mpu6050卡尔曼滤波姿态解算源码
- 4用 Pytorch 训练一个 Transformer模型
- 5Cuda 编程入门_csdn xiaohu2022
- 6读取JSON字符串中的一维、二维数组数据_json解析一维数组
- 78051 系列单片机内部结构_8051内部结构图
- 8scikit-learn(sklearn)库中的网格搜索(Grid Search)自动化的方法来搜索最佳参数组合_使用10折网格搜索最佳模型参数,打印得到的最佳模型,最佳模型参数,最佳得分
- 9Swift并发的结构化编程_withcheckedcontinuation
- 10NOI金牌冲刺day9_cf1334f题解
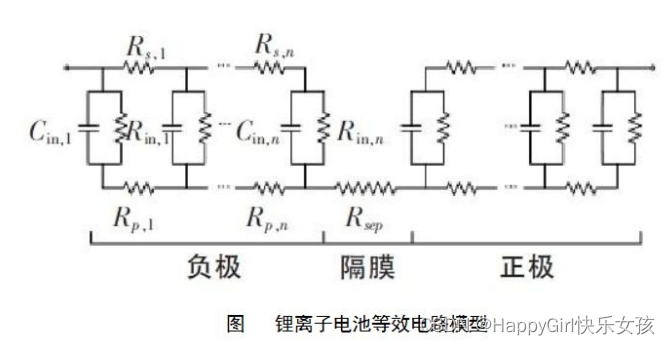
MATLAB基于卡尔曼滤波的锂蓄电池SOC设计matlab仿真代码(链接在文章结尾)_锂离子电池等效电路模型代码
赞
踩
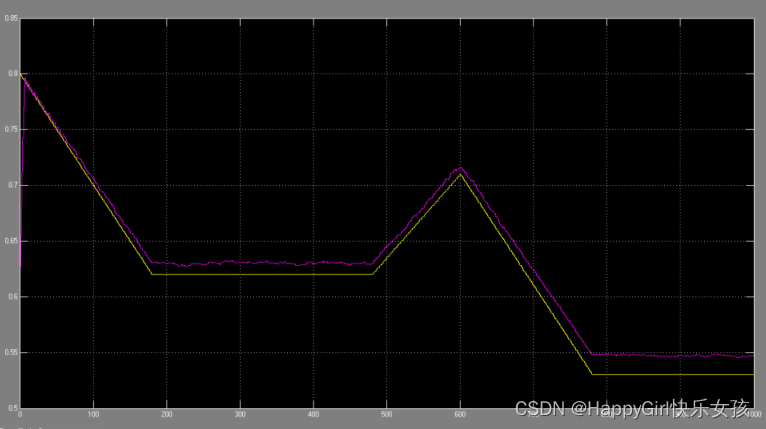
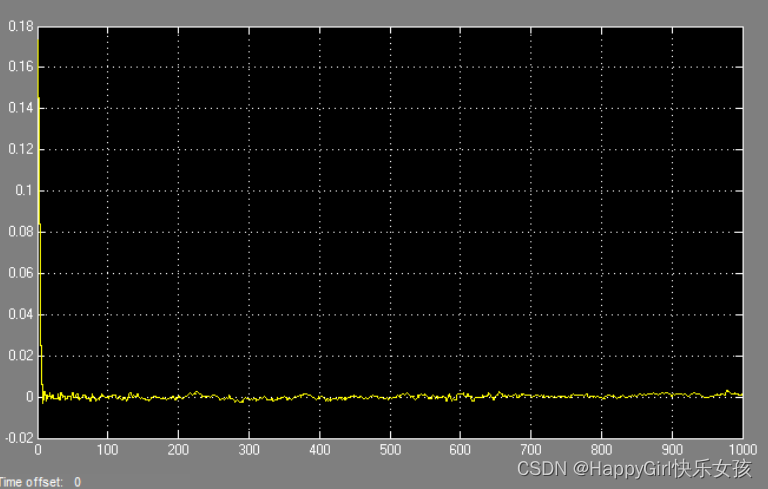
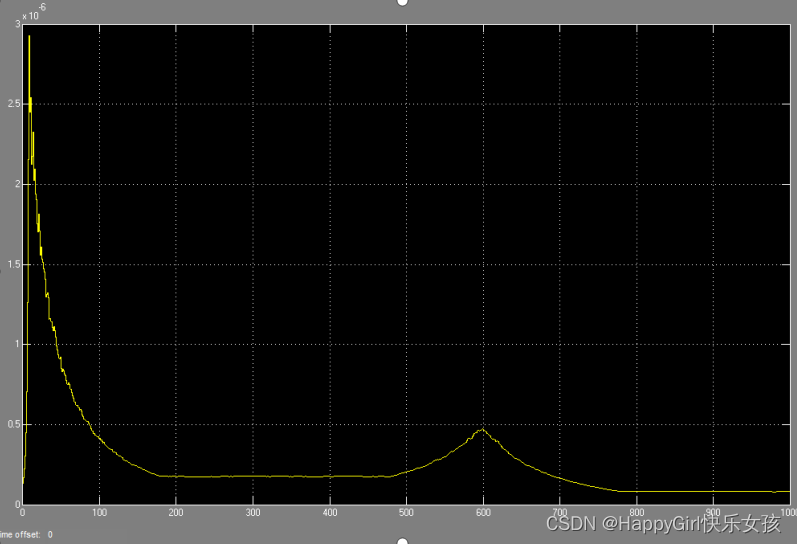
用自适应卡尔曼滤波方法,基于锂离子动力电池等效电路模型,在未知干扰噪声环境下,在线估计电动汽车锂离子动力电池荷电状态(SOC)。
相比于其它电池模型,等效电路模型可以更直观地表现输入与输出,即电流与电压间的关系,易于用数学解析式表达,便于电池分析及模型参数辨识。
采用基本卡尔曼滤波和扩展卡尔曼滤波方法估计电池SOC时, 一般假定噪声为零均值白噪声,且噪声方差已知。在噪声确定的情况下,基本卡尔曼滤波和扩展卡尔曼滤波方法的估计效果很好,但实际上白噪声不存在。 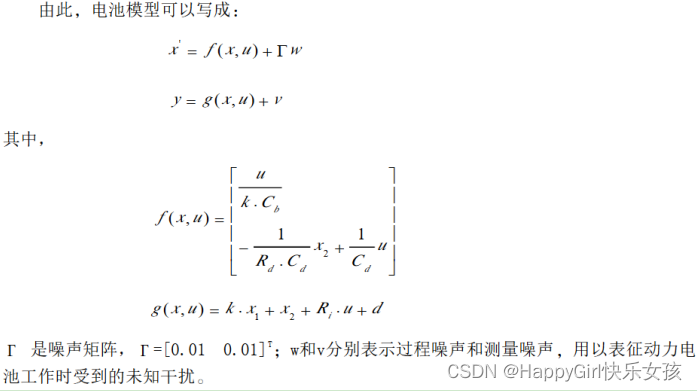
部分代码
卡尔曼滤波S函数
function [sys,x0,str,ts]=kalman(t,x,u,flag,k)
switch flag,
case 0 %初始化设置
[sys,x0,str,ts]=mdlInitializeSizes;
case 3
sys=mdlOutputs(t,x,u,k);
case {1,2,4,9}
sys=[];
otherwise
error(['Unhandled flag=',num2str(flag)]);
end
% mdlInitializeSizes进行初始化,设置系统变量的大小
function [sys,x0,str,ts]=mdlInitializeSizes
sizes=simsizes;
sizes.NumContStates=0;
sizes.NumDiscStates=0;
sizes.NumOutputs=2;
sizes.NumInputs=3;
sizes.DirFeedthrough=1;
sizes.NumSampleTimes=1;
sys=simsizes(sizes);
x0=[0 0 0 0 0]';
str=[];
ts=[-1,0];
% 当flag=3时,计算系统的输出变量:返回三个状态
function sys=kalman(t,x,u,k)
R=1;
L=0.02;
M=-0.0067;
Ls=L-M;
% J=0.005;
k=0.382;
T=0.002;%T=0&x5-per=pi/3&x5-per=2*pi/3&x5-per=pi&x5-per=4*pi/3&x5-per=5*pi/3&x5-per<2*pi
q=5*pi/3;
a11=-2/3;a12=4/pi;
a21=-2/3;a22=-2/pi;
a31=4/3;a32=-2/pi;
end
A=[1-R*T/Ls 0 0 k*T*(a11+a12*(x5-q-per))/Ls 0;0 1-R*T/Ls 0 k*T*(a21+a22*(x5-q-per))/Ls0;...001-R*T/Ls k*T*(a31+a32*(x5-q-per))/Ls 0;0 0 0 1 0;0 0 0 T 1];
A1=Jacobian(A*X,X');
B=[T/(3*Ls) -T/(3*Ls) 0 0 0;0 T/(3*Ls) -T/(3*Ls) 0 0;...
-T/(3*Ls) 0 T/(3*Ls) 0 0]';
C=[1 0 0 0 0;0 1 0 0 0;0 0 1 0 0];
P=[0.01 0.01 0.01 10 1];
R=diag([0.02 0.02 0.02]);
Q=diag([0.04 0.04 0.04 0.05 0.02]);
Xhat1=A*x+B*u;
Phat1=A1*P*A1'+Q;
K=Phat1*C'*inv,[C*Phat1*C'+R];
xhat=[eye(5)-K*C]*(A*X+H*u)+K*X,[[1:3],;];
Phat=[eye(5)-K*C]*Phat1;
sys(1,1)=x4;
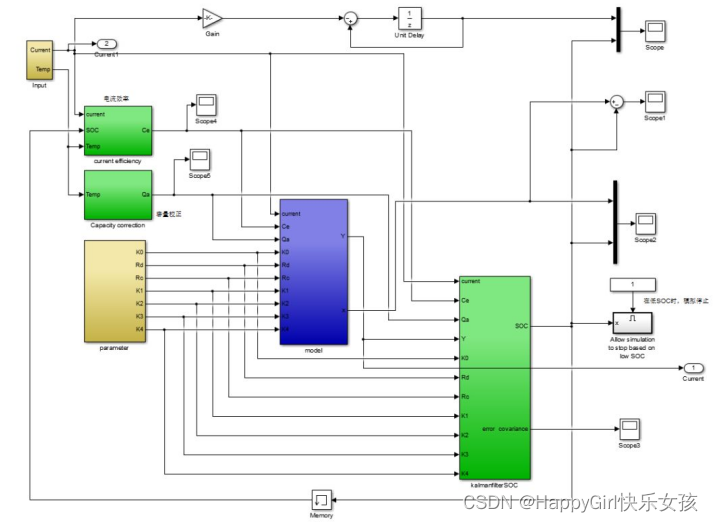
仿真主程序
输入模型

卡尔曼SOC模型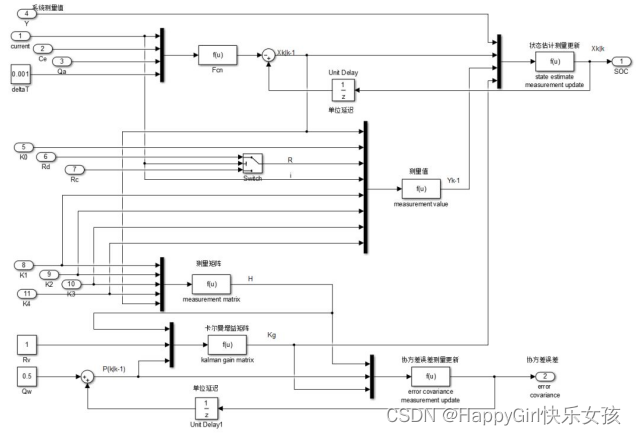
容量矫正模块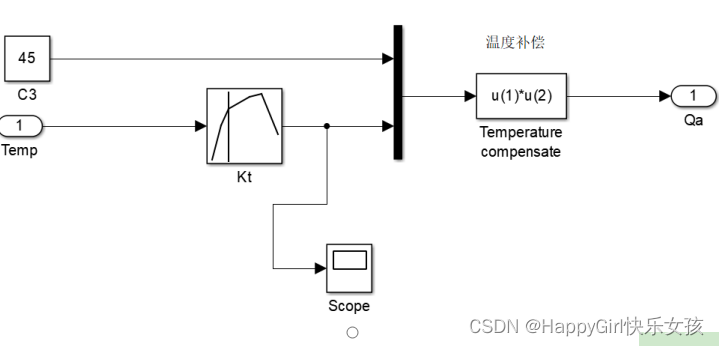
电流效率模块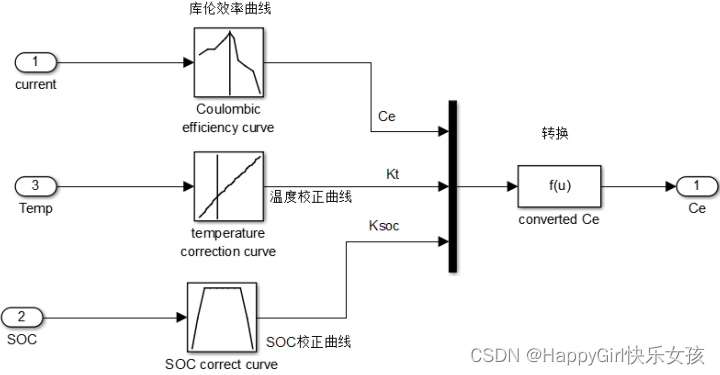
仿真结果图