
- 1使用文心一言API接口进行二次创新的实践_文心一言的二次开发
- 2PyTorch中实现Transformer模型_pytorch transformers
- 3macOS unlocker 4.0.5 for VMware ESXi 7.0
- 4什么是Spark,spark Core,Spark SQL,Scala概述,Scala运算符,程序流程控制,Scala循环,Scala集合,集合中常用元素操作,Scala模式匹配,Scala进阶
- 5熟悉常用的HDFS操作(大数据技术原理与应用-第三章实验)
- 6基于JAVA的服装店库存管理系统 开源项目_java简单库存项目
- 7UE5 蓝图入门
- 8宠物健康养护系统平台(源码+开题)_开源宠物医院管理系统
- 9腾讯物联TencentOS tiny上云初探_tencent things network
- 10pyqt5调用摄像头
特斯拉FSD技术解析_fsd软件架构
赞
踩
特斯拉FSD技术解析
特斯拉疯狂进化的FSD
特斯拉的FSD Beta9(完全自动驾驶测试版9.0)已经在美国开始了全面推送,这标志着特斯拉已经正式迈入了全自动驾驶时代,虽然还不能做到老司机一样完美处理各种情况,但确实已经可以在任何道路上自动驾驶了。
FSD的测试版已经更新到了第9版,随着越来越多的车主加入进来,势必会加快FSD的迭代速度,相信用不了两年,特斯拉的FSD正式版就可以开始推送。
参考文献链接
https://mp.weixin.qq.com/s/Gsubp_cOHylzcFgSB6bZHg
https://mp.weixin.qq.com/s/1kcKd-r9OX0vams4dNMPTQ
特斯拉的解题思路
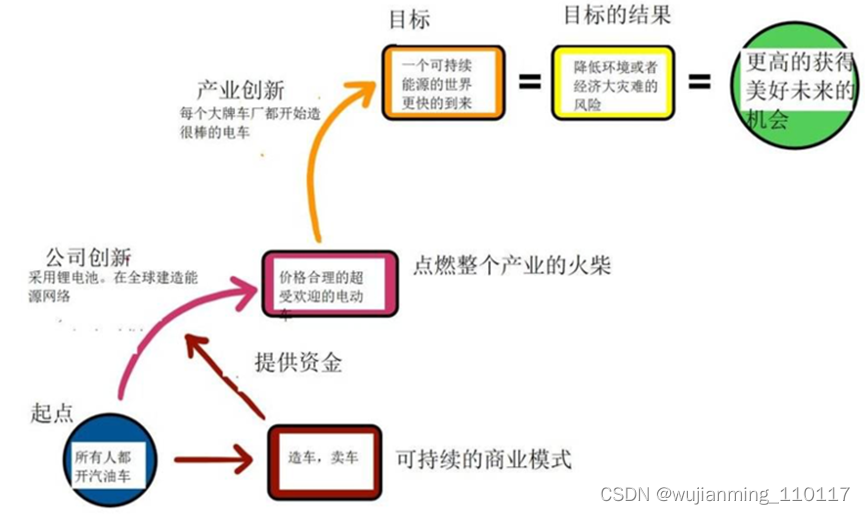
第一步,通过造好车、卖好车,形成可持续的商业模式,然后将盈利用于研发创新;第二步,以创新成果点燃整个行业的热情,带动更多厂商研发制造高品质的纯电动智能汽车,形成产业创新;
第三步,最终让可持续能源的世界加速到来,为人们创造更美好的生活。
“消灭”交通事故
调查显示,全球每天有3万余人死于交通事故。对于“好车”的概念,或许每个人都略有不同,但是都必须基于相同的基础之上,那就是安全。被动安全方面,特斯拉车型有着车身结构带来的先天安全优势。由于没有发动机,特斯拉车型前方自带吸能溃缩区,能在意外中有效保护乘员;钢铝混合轻量车身、坚固的底盘防护、大量高强度钢和超高强度钢的应用,打造固若金汤的安全防护。在最新的美国国家公路交通安全管理局(NHTSA)碰撞测试中,特斯拉全系车型均获得五星碰撞安全评级。其中,Model 3不仅获得NHTSA全五星安全评级、ENCAP全五星评级,还摘得了IIHS SAFETY PICK+顶级安全大奖。在美国政府的“新车评价项目”中,Model 3比其测试的任何车辆受伤概率都低。在事故的预防方面,则有全系标配的主动安全配置守护。每辆特斯拉车型,均有侧撞预警、盲点碰撞警报、前撞预警、速度限制警报、障碍物感应限速、自动紧急制动、车道偏离防避等功能。在此基础上,特斯拉还提供主动巡航控制、辅助转向、自动变道、辅助驾驶导航等功能,车辆预知风险、预判后,系统能够自主实施转向、制动等决策,尽量避免事故的发生。以Model 3为例,当在并入的临近车道中探测到车辆时,Autopilot便会触发侧撞预防功能(转向干预),并保障车辆自动转向行驶到一个更安全的位置。主动安全系统+Autopilot,带来的安全性提升是立竿见影的。NHTSA公布的最新数据显示,在美国每行车674万公里,平均会发生8.66次事故。而这个数据,在使用了Autopilot的特斯拉车主中仅为1次;没有使用Autopilot但有主动安全功能参与的驾驶中,事故约为2次。也就是说,特斯拉的Autopilot让行车安全水平达到平均水平的8.66倍。
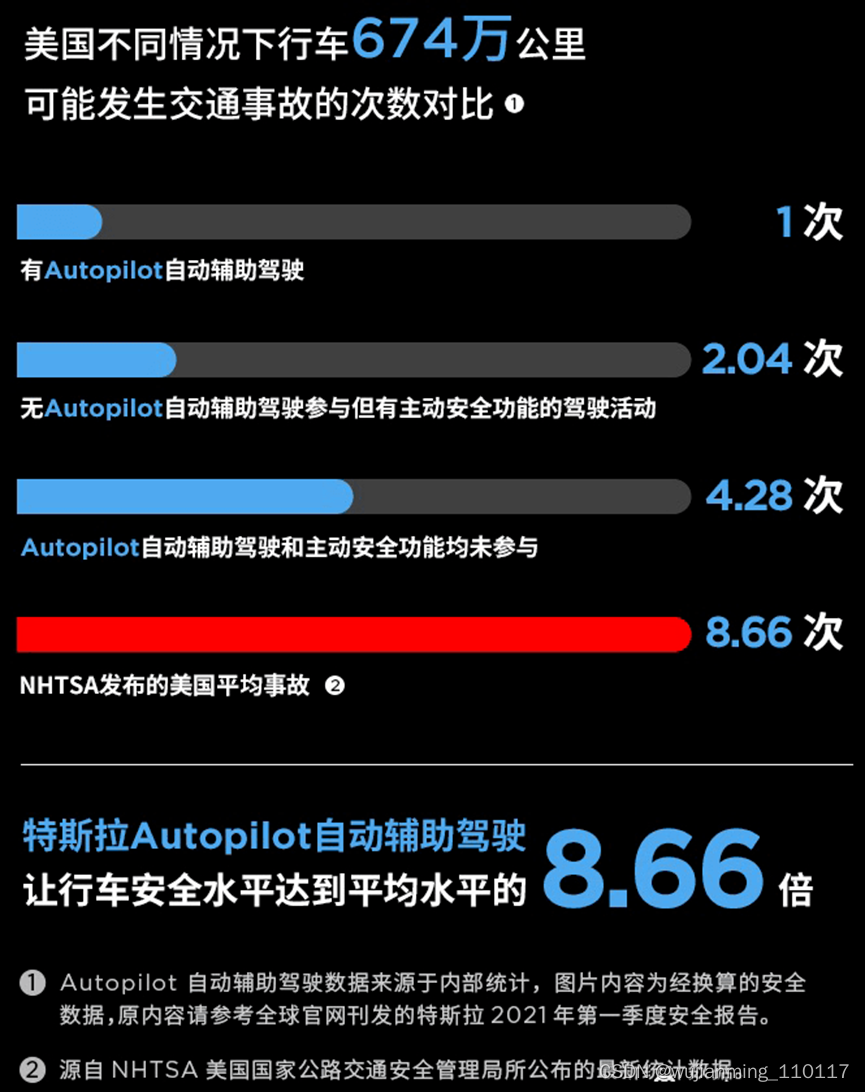
特斯拉2021年第一季度车辆安全报告
另外,对于交通,特斯拉的愿望不只是降低事故率,还有解决“浪费”问题。目前,全世界的交通资源被严重的浪费,而罪魁祸首就是“堵车”。根据官方数据统计,全世界每天有500多万小时被浪费在交通堵塞上,占用道路面积达1700平方公里,因此,全自动驾驶就成了更高效使用交通资源的最佳方式。
详解特斯拉FSD学习逻辑
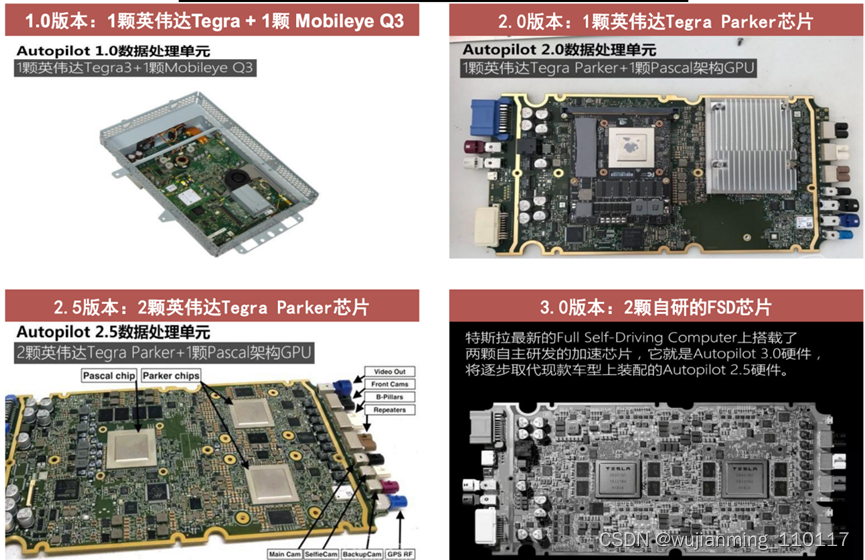
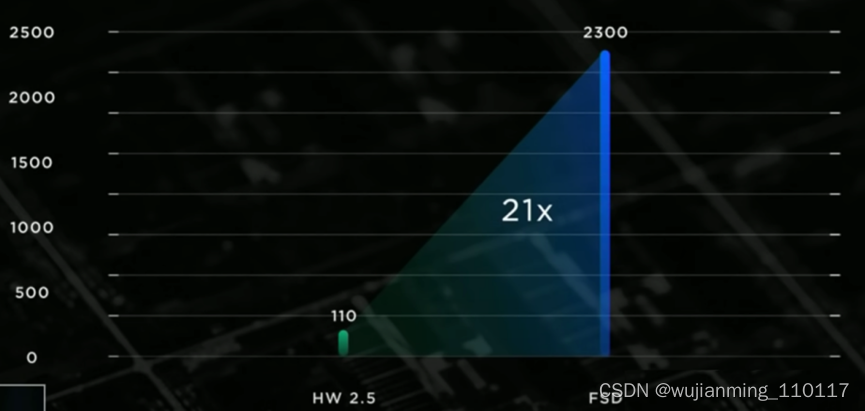
FSD成长秘诀:硬件+软件+数据一个没有交通事故和拥堵的世界,听起来不太现实。不过,特斯拉以目前最接近量产、最现实、最能大范围适配的自动驾驶技术,正让这个愿望逐渐落地。特斯拉的芯片已经经过3次迭代,目前最新的Full Self-Driving Computer上搭载了特斯拉自主研发的两枚芯片,也就是Autopilot 3.0硬件,性能比2.5版本芯片强大21倍。
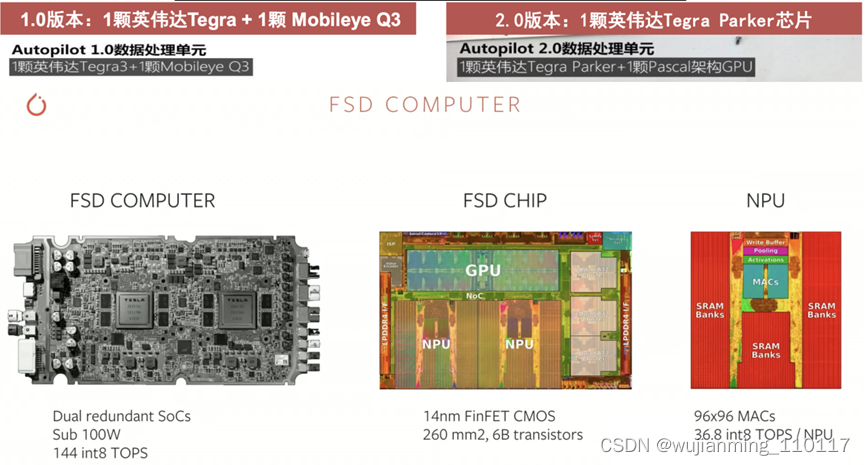
不同芯片针对环境都拥有不同的指令算法特征,简而言之,有自己的特长。AI芯片,在图像识别等领域有着独特优势,其计算方式为矩阵或vector的乘法、加法,配合一些除法、指数等算法。而CPU则适合于不同领域的复杂算法,比如计算机服务器领域;GPU虽然也是针对图像渲染的算法,但其特性不符合神经网络。特斯拉研制的FSD芯片中,其中NNA(NPU)处理器即是为AI算法而存在的。
2017年8月,FSD芯片设计完成2017年12月,第一次试验芯片并成功2018年4月,测试并改进芯片2018年7月,获得量产合格2018年12月,设备装车并测试成功2019年3月,Model S和Model X生产线安装FSD芯片2019年4月,Model 3生产线安装FSD芯片
相较于HW2.5,FSD电脑将算力提升至了144TOPS,每秒处理的图片速度提升至2300帧。
算力的大幅提升,目的在于处理海量的图像信息,特斯拉的自动驾驶辅助系统之所以能够快速迭代和提升体验,就在于通过各类不常见但仍可能存在的“边角案例”情况,再通过(神经网络)深度学习让系统能够处理越来越多的驾驶场景。深度学习,简单来说就是通过硬件模拟人类大脑神经网络系统学习机制的一种学习方式,类似于人们对于外界事物逐渐熟悉和学习的过程。特斯拉通过不断输入数据,人工或自动标注出正确“答案”,令其不断自“进化”,从而快速提供识别率,进而不断覆盖所有的驾驶场景。
特斯拉会自动识别物体,包括路标、路牌、车道线、红绿灯、马路牙子、桩桶、行人、自行车、电动车、摩托车、猫、狗、船等近60亿件物体
每当车辆在遇到各类“边角案例”时,也就是遇到一些比较“棘手”的驾驶场景,或驾驶员的操作与系统“预想”操作不一致时,车辆都会脱敏匿名将实际情况上传给特斯拉云端服务器,通过庞大的集中算力进行深度学习以优化系统。当然,系统也为用户提供了不上传数据的选项,所有上传至云端的数据均为脱敏、匿名处理后的数据。相比更加依赖车队测试的企业,特斯拉FSD学习过程的优势在于绝大部分数据是由真正行驶在路上的车辆收集的,只有小部分来自测试车队,更加贴近车主日常驾驶场景,而这个数据正在呈指数级增长。早在2020年4月,特斯拉启用Autopilot的行驶里程就已经突破48亿公里。专家预测,这个数字将在2021年超过80亿公里。有机构粗略计算,如果用户平均每天驾驶约一个小时(每辆车8个摄像头),车队每月大约会产生1.968 亿个小时的视频,这样庞大且高质量的数据量,是全球任何车企都无法比拟的。为了处理巨量驾驶数据,特斯拉将把针对自监督学习技术的研发提高到绝对优先级。特斯拉启动了一个代号为Dojo(道场)的重大项目,是一台训练用超级计算机,处理的数据不再停留在图片层面,而是针对视频类的数据,能够以较低的成本实现算法性能的指数级提升。
自动驾驶赛道的“独行者”
感知系统新思路:比雷达还要灵敏的视觉方案自动驾驶系统,传感器得到的数据是一切的基础,不过不同的传感器各有不同优劣势。对于特斯拉而言,雷达+摄像头+高精地图,从来都不是一个完美的方案。

之前特斯拉所搭载的毫米波雷达(Radar)的优势在于对距离、速度等信息的判断,不过通过算法的优化,目前特斯拉已经能够通过摄像头实现该目的。
但特斯拉并没有急于取消雷达,而是在此之前,通过雷达来判断全新的纯视觉方案是否能够准确得知距离、速度等信息。
能够替代雷达给出距离、速度等信息还只是其中一个理由,另一个更关键的理由在于,虽然越多的传感器经过融合算法后,能够提供相对越全面的环境信息,但问题是当不同传感器给出的信息对决策来说是互相矛盾时,就会出现各类问题。(例如幽灵刹车)

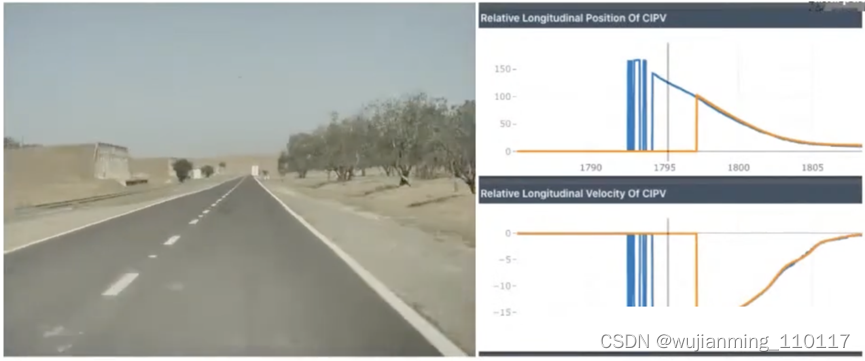
特斯拉经过实际测试和对比,通过纯视觉方案不仅能够提供与雷达一样的信息,并且还将体验优化提升了很多。在前车紧急制动的场景下,纯视觉方案没有出现雷达那种信息中断和误判的情况,非常线性,从而能够提供线性的制动决策,带来更佳的使用体验,提升乘客的乘坐舒适性。

还有一种比较常见的情况就是对静止物体的判断。对于毫米波雷达来说,前方车辆停靠在路边,导致识别较晚,在距离车辆110米时才感知到前方停有卡车,而纯视觉方案在距离车辆180米的时候就已经识别到了该车辆。
因此,在经过技术推论、实际验证等多个环节后,特斯拉纯视觉方案的可行性已经得到了证明。对于特斯拉而言,无论是产品还是自动驾驶系统,规模化都是核心要素之一,在各类自动驾驶方案中,纯视觉方案的适应性和潜在覆盖驾驶场景都是最全面的。
目前,特斯拉正在加快Dojo超算的建立,通过海量的算力和人工智能自动标注技术,将处理数据的速度和能力再度提升一个台阶;HW4.0硬件也正在研发筹备中。
未来,特斯拉的自动驾驶能力,还将高速进化。
特斯拉会在2022年实现FSD吗?
2022年1月27日,马斯克在特斯拉2021年Q4及全年财报会议上就FSD发表最新观点:
“个人预计,特斯拉将在2022年实现比人类更安全的FSD(完全自动驾驶)……”
“如果(这一目标)没能实现,会感到非常惊讶。”
“特斯拉之外的其他公司,要实现FSD还需5年或更长的时间。”
马斯克的表态吸引了美国主流媒体的兴趣。2月,《华盛顿邮报》和CNBC先后撰文,“揭露”特斯拉FSD的当前水平距实现真正的自动驾驶还非常遥远,并用骇人的标题吸引了大量点击。
一时间,太平洋彼岸的广大特斯拉唱衰者们对马斯克口诛笔伐。在眼中,“特斯拉让一款未完成的测试版产品在公开道路上行驶,是在未经允许的情况下将其他交通参与者置于风险中”。
而一些长期跟踪特斯拉进展的科技媒体,则在更客观地评价FSD Beta现状的同时,对马斯克“2022年即可实现FSD”的论断表示谨慎怀疑。
FSD究竟发展到了什么水平,特斯拉距实现自动驾驶还有多远?以下是笔者的观察。
一、6万名“免费测试员”
FSD(Full-Self Driving)是特斯拉在2016年10月推出的自动驾驶套件,主要功能包括导航辅助驾驶(NoA)、自动变道、自动泊车、智能召唤、交通信号识别、(基于导航路线的)城市道路自动转向等。
自推出至2021年10月的五年时间里,FSD在美国的选装价格从2,500美元一路上涨到10,000美元,尽管已推送了高速场景的NoA等功能,但最受关注的城市场景中的功能却始终以“期货”形式存在,从未正式交付。
其间,马斯克多次发表过关于FSD的自信言论:
2016年10月19日,马斯克在一次电话会上表示,特斯拉将在2017年底实现从洛杉矶到纽约时代广场全程无接管,甚至充电也由车辆独立完成。
2019年4月22日,马斯克在“自动驾驶日”上表示,2020年底,特斯拉将会拥有“百万辆”在公共道路上行驶的可用于共享出租车Robotaxi的车辆。
……
尽管FSD的进展在全球量产车中处于领先,但马斯克承诺的节点一次又一次跳票,成为人们批评和调侃的口实。
现实是,在至今累计超过16万名购买了FSD套件的特斯拉用户中,很多人已将新车开成了旧车,直到换车时也没能等到属于自己的FSD软件推送。
不过,根据历史经验:马斯克承诺过的事情向来都会推迟,但最终也会兑现。
2020年10月22日,翘首期盼的人们总算看到了希望:特斯拉开始在部分员工和早鸟用户人群中小范围测试FSD Beta,并利用收集到的长尾场景(corner case)数据迭代软件。
又过了11个月,2021年9月25日,那些购买了FSD套件的普通特斯拉用户终于迎来激动人心的时刻:在车辆中控屏上显示的软件更新中,第一次看到了FSD Beta的“申请按钮”(Request Button)——此时的版本,是v10.1。
“申请按钮”(Request Button)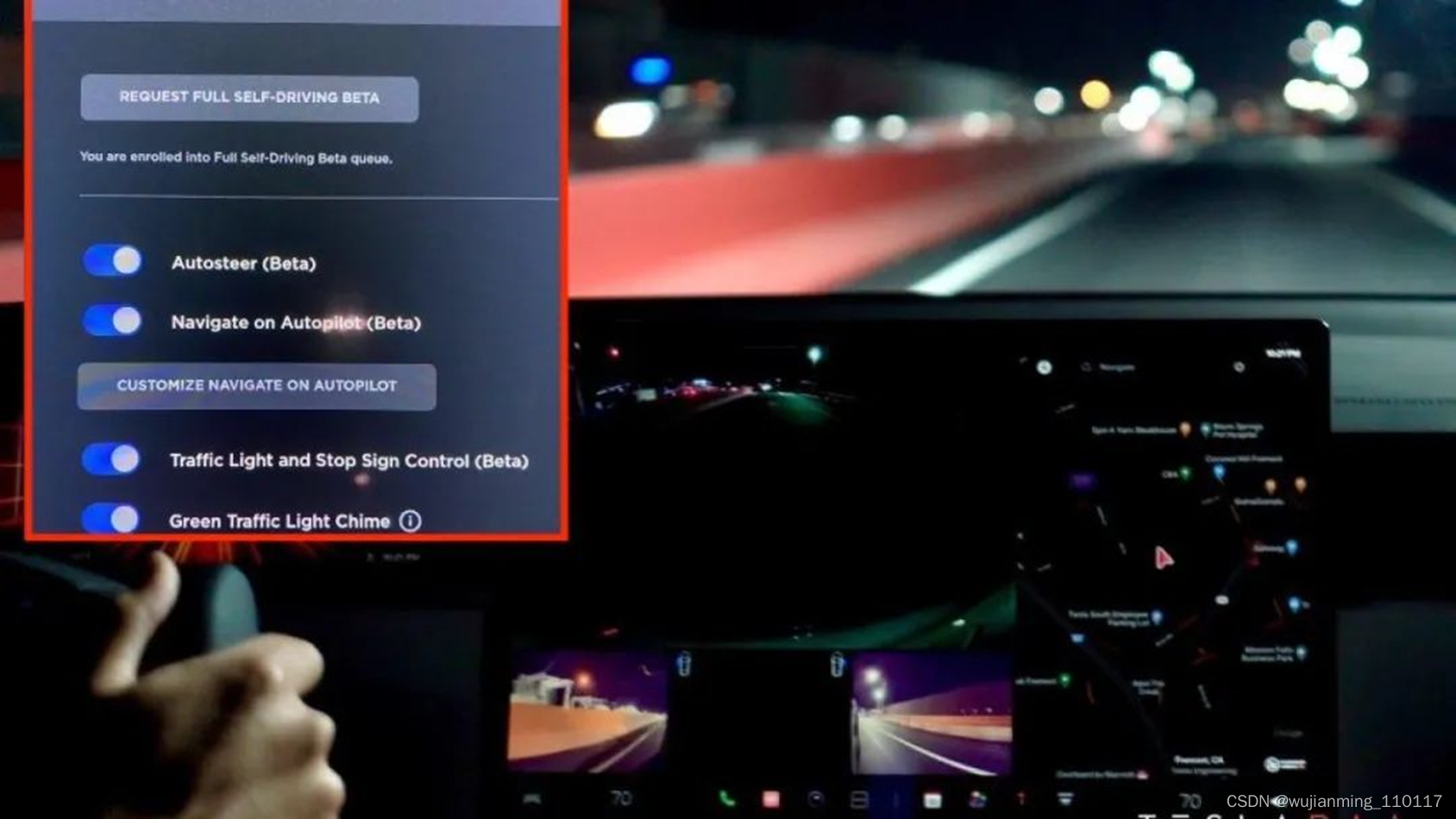
然而人们很快发现,申请按钮并非FSD的“直通车”:在点击按钮后,用户需参与特斯拉设计的“安全驾驶评分系统”,要求在申请后7天内(最高累计30天)每天驾驶足够的里程,并努力避免触发碰撞预警、重度刹车、激烈转向、危险跟车、Autopilot无接管强制退出等情况——出现这些情况的车主将被扣分,而得分越高者越能更早地体验FSD Beta。
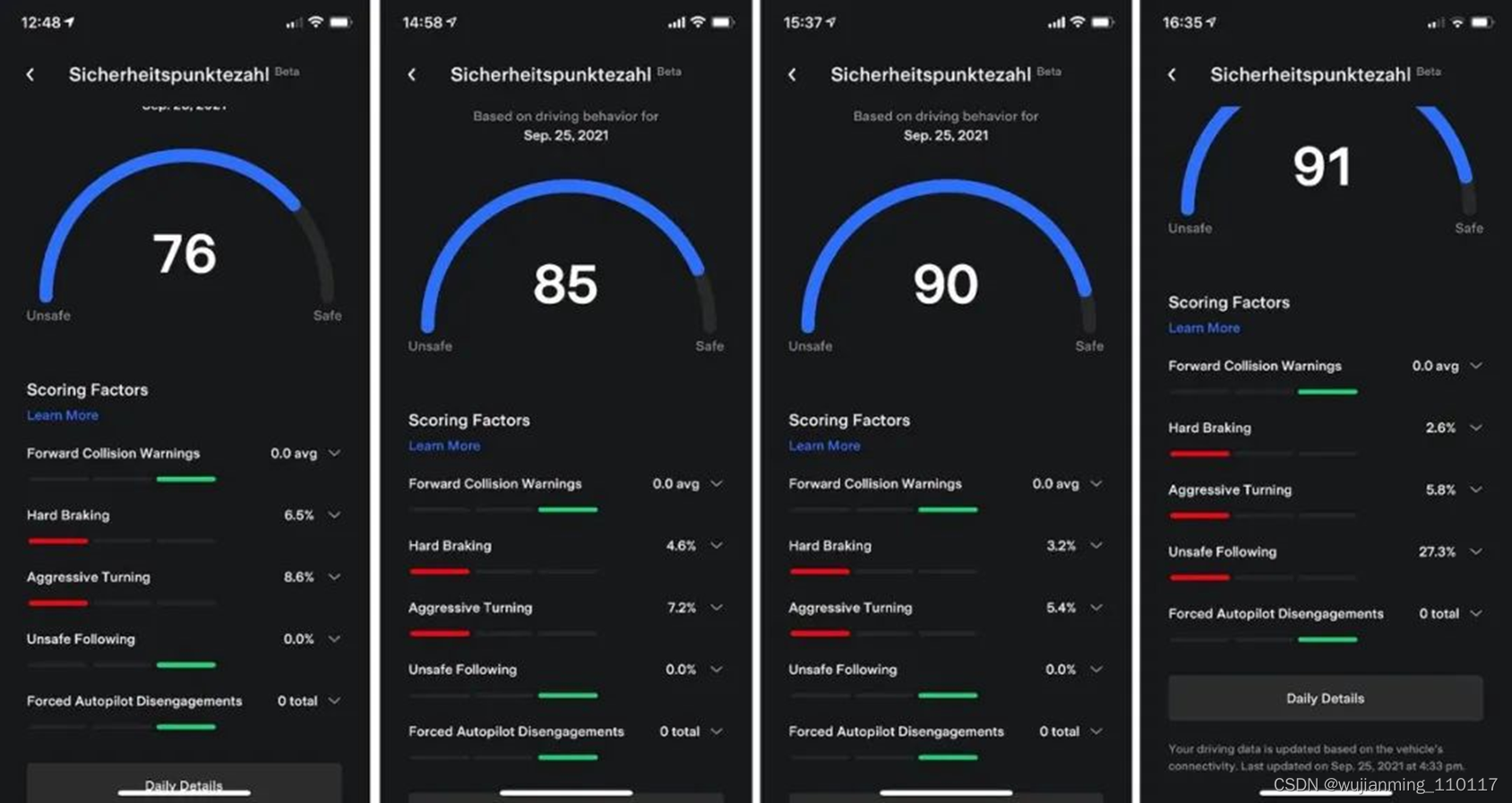
“安全评分系统”(Safety Score Beta)截图
特斯拉之所以在FSD Beta的大规模推送中异常谨慎,本质上是因技术的发展超前于监管法规的制定。
虽然以“Full-Self Driving”命名,并已能够在高速、城区、乡间等不同路段中自主做出加减速、转弯、过环岛、礼让行人等动作,但在法规和技术都还不完备的情况下,FSD仍是一个不折不扣的辅助驾驶系统。
这意味着,在车辆行驶的所有场景和时段,驾驶责任均归属于驾驶员,要求驾驶员始终将手放在方向盘上,监视车辆的动作,准备好随时接管和纠正车辆做出的不合理、不安全的举动。
这些对驾驶者的要求,与市面上其他厂商的辅助驾驶系统并无二致。
特斯拉仅是在辅助驾驶范畴内的能力更强、覆盖场景更多,以至在一些特定行程实现了全程无接管,但这并不足以支持用户在行驶中分神他事、将车辆置于完全自主驾驶的状态。
据公开信息,在2020年10月至2021年9月由2000名早鸟用户参与的测试阶段,特斯拉从未发生过任何一起因FSD Beta系统误操导致的交通事故。
马斯克希望在将系统推送给更大规模人群后,继续保持“0事故”的安全记录,但更大规模的人群意味着更多样的驾车习惯,和呈指数级上升的不可预测性,因此特斯拉根据用户的驾驶激进程度设计出“安全评分系统”,意在筛选出驾驶更谨慎的人群参与前期测试。
尽管这一系统远非完美,人们对其评价也褒贬不一,但在美国当前的监管法规未对FSD这样的L2系统和仅支持“自动车道保持”功能的L2系统作出区分的现状下,特斯拉通过自行制定规则,总算有了一套筛选体系。
在开售六年之后,FSD终于以Beta版的形式,部署在普通用户的车上。
2021年11月初,首批在安全评分中获得100分的车主,怀着神圣般的心情在爱车上观看FSD Beta安装进度条,然后兴高采烈地开着那“一个部件也没有更换,却已是全然不同的另一台机器”的爱车,冲向美国各州的大街小巷。
这是人类历史上第一款(在驾驶者手扶方向盘的监视下)能在各种道路上自主加速、刹车和转弯的私家车。
此后,随着收到推送的用户数量不断增加,特斯拉FSD Beta进入了大约每两星期更新一次的稳定节奏。截至2022年2月,最新版本来到v10.10.2,已收到推送的车主规模约6万人。
这群人,无论本身做什么工作,当驾驶爱车开启FSD Beta行驶在路上时,做的事情与Waymo、Cruise等L4级自动驾驶公司雇用的安全员非常相似:
手扶方向盘,关注路况,观察车辆自主操控的每一个动作,在车辆操作不当时手动接管,并点按屏幕上的记录功能,以便将方才发生的不当操作视频回传至公司后台,供技术团队分析、标注,训练。
最显著的区别可能是,Waymo们的安全员团队要从公司领取薪水,而特斯拉的“安全员”非但分文不取,甚至还要自掏腰包、经过严格筛选,才能获得参加测试的“殊荣”。
名为“Black Tesla”的YouTube博主,道出了一群美国特斯拉爱好者+极客自媒体人的心声:
“大声说出这套系统(FSD)的能力,以及让惊呼wow的地方;同时也大声说出这套系统的局限和不足,目标是帮助变得更好,帮助人类更快实现自动驾驶。”
在五个月后的今天回望特斯拉FSD Beta的大范围推送:尽管饱受争议、尽管每向前一步都极其谨慎,但人群规模从2,000到60,000,扩张速度呈持续加快之势。
为什么特斯拉要将仍处于进化中的FSD Beta推向普通用户?答案并不难猜:获取数据。
二、数据饕餮
要理解特斯拉对收集行驶数据的狂热,最好的讲述人是特斯拉AI及视觉感知负责人Andrej Karpathy。
2001年,15岁的斯洛伐克少年Andrej一点也不快乐,因为他认为这个500万人口的中欧小国不是一个实现雄心壮志的好地方。当父母提出移居加拿大的设想时,还不会说英语的Andrej不假思索地举双手赞成。
2015年,已在斯坦福大学就读博士的Andrej设计并主讲了名为《卷积神经网络视觉识别》(Convolution Neural Network for Visual Recognition)的课程。这是历史上第一个关于深度学习(Deep Learning)的大学课程,借助互联网的传播力,这门课成为全球无数人工智能学习者的重要学习资料,Andrej也很快成长为该领域最具影响力的专家之一。
2016-2017年在OpenAI任研究科学家期间,凭借在图片识别领域的研究,Andrej与特斯拉自动驾驶的视觉识别团队多有交集。到了2017年6月,马斯克正式向Andrej抛出橄榄枝,邀其领导特斯拉AI团队,负责神经网络视觉感知开发。
自动驾驶业务是特斯拉公司的灵魂,由马斯克亲自领导,因此Andrej接任的是一个被称“一般人撑不过6个月”的高危职位,却不料此君一干就是近5年,并成了代表特斯拉披露研发进展的“红人”。
针对“什么是AI、为什么要将AI技术用于自动驾驶”这个问题,Andrej从学者转为企业研发人员的个人经历,可作为最恰当的回答。
传统的计算机软件由人类程序员编写。写出一系列指令,从“输入”开始,到“输出”结束,形式上是一条条易于人类理解的逻辑公式。
这些用Java、C、C++等传统代码编程的方式,被Andrej称为“code 1.0”。
尽管计算机的运算能力远超人类,但在面对“图像识别”这一类任务时却表现得一筹莫展——最典型的例子便是辨别图片中的动物是猫还是狗。

对计算机而言,图像是由大量像素组成的,每个像素都有一个数值表示其红色、绿色、蓝色的亮度。面对数以百万计的数值,希望一个人类程序员通过写出“if… then…else…”句式的指令,从而让计算机判断出图上画的究竟是一只猫还是一只狗,这几乎是不可能完成的任务——因为,哪怕只是对一张图片而言,在不同的亮度、角度、姿势、光源遮挡等等条件下,猫或狗的样子都有无数种变化。要通过编写指令将这些变化穷尽,实在超出了人类的能力范围。
计算机不具备对人脑而言再自然不过的归纳、推演能力,也不像人脑那样对三维物理世界中的物体有着与生俱来的理解力,因此,即使能够以毫秒级速度算出每一个像素的亮度参数,也无法得出准确的猫/狗判断。
与code 1.0相比,Andrej称之“code 2.0”的深度学习(在本文语境下,可理解为“AI”的同义词)是一种全然不同的编程方法:
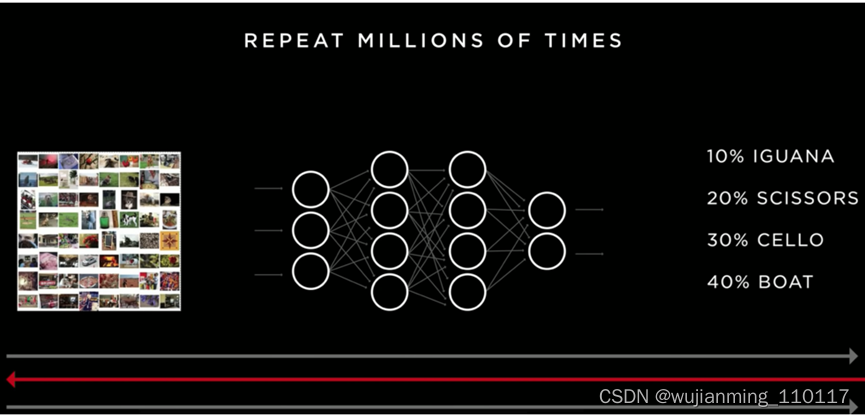
在输入端,是经过整理的包含大量图像的数据集;在输出端,是经过标注的期望得到的结果(猫或狗);在二者中间,是一个由大量神经元(Neuron)构成的神经网络(Neural Network),各个神经元之间以不同的强度相连接。
神经网络(NN)工作的流程是:输入图像,NN输出结果,衡量误差,调整参数,再次输入图像……如此往复。
对软件2.0的“程序员”而言,这意味着只在更高层级上规定期望得到的结果,而不再关注NN内部的具体算法和计算过程。
“调整参数”,实际上是指调整NN中各神经元之间的连接强度(突触强度)。
举例而言,特斯拉视觉感知系统中用到的ImageNet数据集可被视为一个NN,有大约6000万个参数,这些参数就像是对应着6000万个旋钮,设计者可转动这些旋钮调到任意值,就仿佛为乐器调音一般,直到得到令人满意的计算性能。
如此往复进行的测试、衡量误差、调整、再测试的过程,即是通常听到的对神经网络的“训练”。
不难理解地,随着NN的训练量增多,其识别结果的准确率会不断提升——一个训练过100万张不同猫狗图片的NN,识别准确率将会显著高于仅训练过1万张猫狗图片的NN。
但需强调的是,供NN训练的数据并非简单地“越多越好”,而是“越丰富越好”,亦即,1万张各不相同的猫狗图片,对NN训练的帮助远大于100万张一模一样的猫狗图片。
在加入特斯拉之前,Andrej已是地球上“猫狗图片机器识别”领域的冠军级人物。
可这样的技术仅停留在学术界,并未给人类的生活带来什么改变。Andrej渴望用自己的学识,参与一款改变人类生活的产品的开发——自动驾驶,无疑正是这样的舞台。
自动驾驶的难题,首先是对外部世界的感知难题——对周围环境中每一个交通参与者识别越准确,车辆就越容易做出正确的应对、找到安全高效的行驶路径。
Andrej认为,感知的问题本质上是一个语义识别问题,并不是一个测量问题——人类的视觉系统并不具备测距能力,但配合人脑这台“处理器”,却可以做出正确的路径规划和驾驶行为。
无法获取深度(距离)信息的人类视觉系统,实际上是在对外部世界进行实时预测——Andrej相信,用摄像头代替眼睛、用神经网络代替人脑,同样可以完成这样的实时预测。
这与马斯克的理念非常契合。
然而作为实施者,Andrej需要面对的是远比图片识别复杂得多的任务:特斯拉车身外部共有8个摄像头,在车辆行驶时以每秒36帧的频率,产出从不同角度拍摄的、总像素达960万的图片信息。Andrej团队打造的神经网络,可将这些图像信息“转译”为带有X、Y、Z轴坐标的3D矢量空间——亦即,通过8张角度不同的2D图片提供的信息,以电子形式还原出一个包含车辆周围360度环境的3D世界——再基于这一矢量空间中的信息,规划和执行对车辆的控制。
尽管,特斯拉用于视觉感知的NN远比前文所述执行图片识别任务的NN结构更复杂,但二者身为“数据饕餮”的本质却是相同的。
想要使特斯拉汽车在数百万个不同场景下做出正确应对,就需要“投喂”足以包纳这数百万个场景的图像信息,供NN学习。
在开始NN训练前,Andrej的团队首先要做的是NN的架构设计工作,一旦总体架构搭建完成,在开始NN训练后,团队的更多精力就会转向对数据的处理。
这是因为,如上文所述,设计者无法在NN训练过程中通过编写确定的指令告诉NN该如何预测,而只能通过对数据进行筛选、分类、标注等处理,用输入给NN的数据影响和改进性能。
Andrej认为,经过几年开发后的当下,特斯拉拥有的深度神经网络架构已趋于成熟,只要数据集不断改进——这一改进包含“数据量不断增大”和“数据标注不断完善”两个层面——神经网络的性能就没有真正的上限。
因此Andrej表示,其团队当前仅有20%的精力用于架构设计和算法调整,而其余80%的精力都在和数据打交道——通过反复推敲的、创新性的数据标注,不断提升NN训练的效率,”榨取”NN的最优性能。
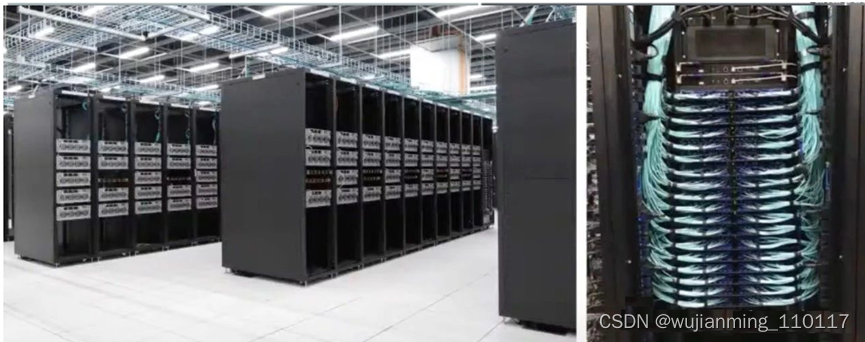
如果以上论述成立,意味着在“数据不断改进”的前提下,特斯拉将会需要不断增大其用于训练深度神经网络的计算机算力——这便是特斯拉要打造超级计算机Dojo的原因。
根据2021年特斯拉AI Day上透露的信息,构成Dojo超算的D1芯片和ExaPOD计算机结构,决定了Dojo的体量和算力在理论上可以无限扩展——这与神经网络“数据集越大、算力越大,训练出的性能就越强”的特性是吻合的。
最后还有一个问题:即使数据量无限增长,若数据标注环节只能通过人工完成,海量的数据终将失去意义,因为更多的标注人员不仅意味着更高成本,而且由于培训门槛的限制,标注团队的规模无法快速扩张。
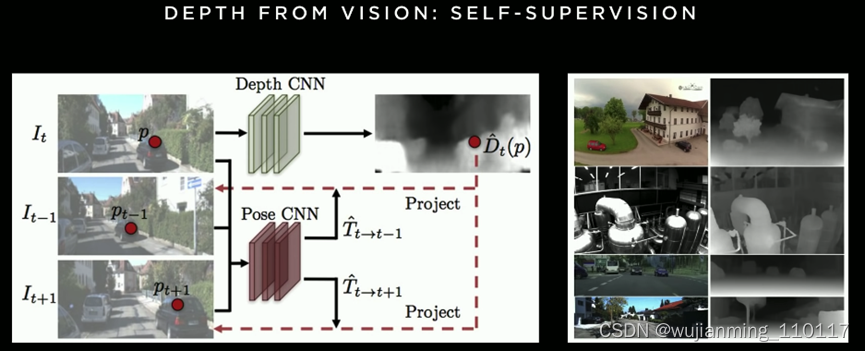
针对此,特斯拉的解决方案是”自监督学习”(或称“无监督学习”),即在无需人工参与的情况下完成对数据的标注和反复训练。
自监督学习的具体方法可有多种思路,Andrej分享的常见方法是让NN“预测未来”:
由于车辆摄像头拍摄到的是连续不断的实时视频,从中截取一段时间内的多张图片,将其中起始节点的图片输入NN,让其预测接下来几秒将会发生的事情(包括可行驶路线的变化、交通参与者的移动方向和移动速度、静止物体的变化等等),再将预测结果与实际拍摄的图片进行对比验证,根据验证结果做出标注,再将正确标注后的图片输入NN进行训练。
另一种自监督学习的标注方法,是借助激光雷达等具备精确测距能力的传感器,将特斯拉视觉识别得出的3D矢量空间与试验车上搭载的激光雷达测得的精确3D矢量空间相对比——特斯拉曾多次被媒体曝出在测试车上安装了Luminar激光雷达,并被误认为考虑在量产车上搭载,实际则是出于训练目的。
综上,假设Andrej与马斯克坚信的基于纯视觉感知的技术路线真能最终实现L4级自动驾驶 (马斯克认为不仅能、而且是唯一可能的路径),那么当前的特斯拉已处在“万事俱备,只欠数据”的阶段。
数据,更多的数据,更多准确标注的高质量数据。
想要获得高质量数据,最好的解决办法就是让数量庞大的普通用户用上FSD Beta,将车辆开上纷繁复杂千奇百怪的现实世界道路,找到那些FSD还无法处理的Corner Case,通过正确的标注和反复训练,直到Corner Case不再Corner。
用Andrej的话说,这是一种近乎“蛮力”的方法,但很可能也是实现AGI(通用人工智能)的最佳方法。
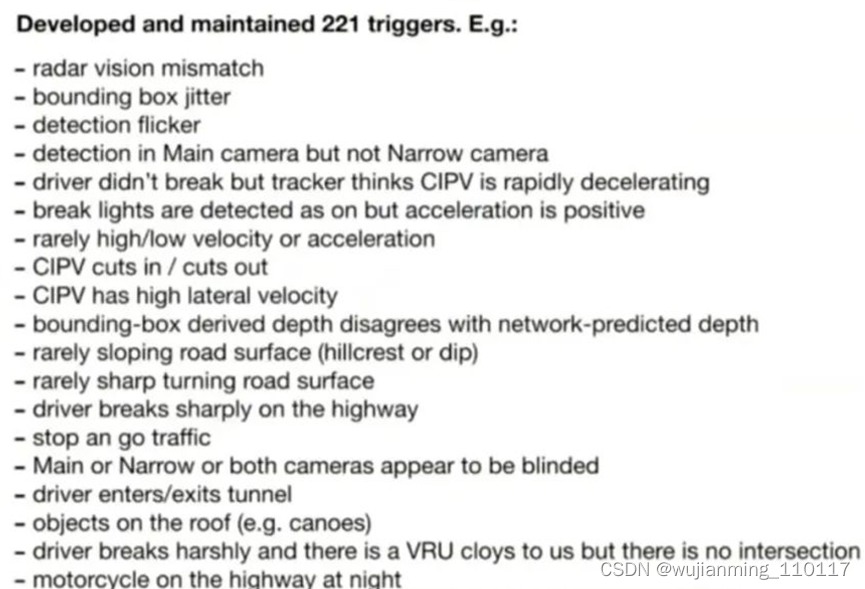
为了识别出这些珍贵的Corner Case,及时记录、上传以供分析使用,Andrej的团队定义出221种“触发开关”(Trigger)。这些Trigger的设计和迭代,是神经网络团队的核心know-how之一。
可以预见的是,在2022年,参与FSD Beta测试的人群规模将继续扩大。随着系统越来越好用,将会有更多特斯拉车主选装FSD——2022年1月,FSD在美国的价格再次上涨,达到12,000美元,而特斯拉提供的另一种选择是以199美元/月的价格订阅使用。
三、2022年会有L4吗?
2015年,时任谷歌自动驾驶总工程师Chris Urmson在评价特斯拉的辅助驾驶系统时称:
“……期望这样的辅助驾驶系统不断进化,最终变成自动驾驶汽车,这就好像说:只要非常努力地练习跳跃,总有一天能飞上天空。”
这段话代表了以L4级自动驾驶为目标的科技公司,对特斯拉采用的从L2到L4渐进式路线的不屑——仿佛不与现有的汽车产业划清界限、单独开发出一个全新的汽车物种,就不足以支撑高科技公司们的“颠覆者”人设和高估值。
直到2021年初,时任Waymo CEO John Krafcik仍在发表“特斯拉开发出了一套不错的辅助驾驶系统,但Waymo要做的是自动驾驶”之类的言论。
在马斯克看来,直接做L4级自动驾驶的路线注定走不通,因为那太贵了——除购车成本之外,Waymo的每辆车需花费超过10万美元加装自动驾驶套件。
单车成本过高,加上法规和技术本身的限制而无法商业化、无法获得收入,直接结果就是无法获得足够的测试数据。
至今,Waymo的Robotaxi测试车队仍停留在约700辆的规模。
特斯拉通过推出Model 3和Model Y,将具备FSD硬件的车辆总价格控制在5万美元的级别,并在2017-2021五年内卖出超过200万辆汽车。
反映在测试数据上,由规模产生的差距正在被继续拉大:
根据美国加州交通管理局(DMV)发布的数据,2021年全年,Waymo在加州自动驾驶测试里程为233万公里——即使将其他27家提交了测试数据的企业全部算上,2021年美国加州自动驾驶测试总里程也只有约410万公里。
反观特斯拉:即使假设搭载FSD Beta的车辆规模停留在6万辆,以每辆车全年行驶2万公里、开启FSD的里程以总里程的10%计,FSD全年的实际道路行驶里程将达600002000010%=1.2亿公里。
考虑到车队规模仍在迅速扩大,并且由于FSD Beta支持城市场景,用户开启FSD的里程占比大概率会远高于10%,因此特斯拉在测试里程方面的领先优势很可能达到两个数量级。
更可怕的是,与Waymo在凤凰城、旧金山等少数几座城市中的特定区域内行驶相比,搭载FSD Beta的特斯拉汽车可以在美国境内的任何一条公共道路上行驶。
Waymo们梦想中的Robotaxi商业帝国的确蕴藏着巨大的潜力,只是——至少在当前看来——特斯拉才是那个更接近抵达这座帝国的玩家。
另一方面,在全球汽车产业,正如大众集团CEO迪斯反复强调的:与电动化相比,自动驾驶才是那个真正的“Game Changer”。
自动驾驶技术的意义,一方面是在很大程度上消灭交通事故,使公路交通变得前所未有的安全;另一方面,自动驾驶还将把人类从枯燥的驾驶任务中解脱出来,获得支配时间的自由。
正因为自动驾驶技术将会带来的巨大价值,当领先的玩家实现L4级自动驾驶后,可供跟随者们追赶的时间窗口将会迅速收紧、关闭。
在今天的自动驾驶行业,特斯拉就是那头“房间里的大象”。
每一名汽车从业者,都应当正视并密切关注特斯拉FSD的进展——虽然有一个每年都在吆喝却每年都被“打脸”的CEO,但如果说人类真的正在接近实现自动驾驶,那么这个接近者就是特斯拉。
回到文章开头马斯克针对FSD的预测:
“特斯拉将在2022年实现比人类更安全的FSD。”
这个预言会成真吗?
一个值得关注的限定语是:“比人类驾驶员更安全”。笔者认为,判断是否满足这一条件的标志,将会是特斯拉取消“安全评分”的限制,无条件向所有订阅FSD的用户开放推送。
然而,即使这一里程碑在2022年达成,也并不意味着FSD(Full-Self Driving)或L4级自动驾驶的实现。
更大的可能性是,到2022年底,收到FSD推送的特斯拉用户规模可能达到16万-20万人,但FSD届时仍将以Beta形式存在、仍将被归类为L2级辅助驾驶系统,仍将需要驾驶员时刻关注路况、随时接管。
但从另一方面看,这将会是一个实际能力不断趋近于L4的L2系统——按照业界常用的SAE J3016自动驾驶分级标准,已无法精确定义FSD的能力级别。
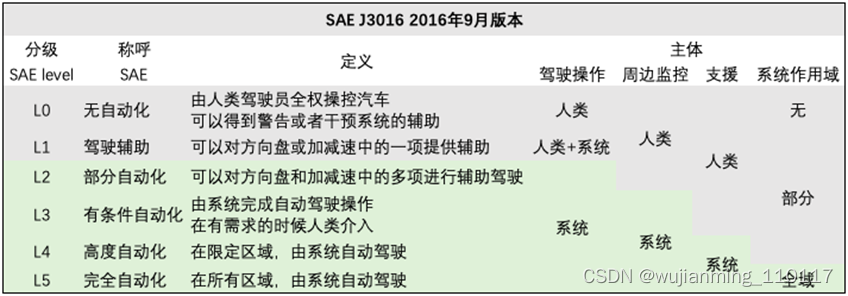
若参考智能驾驶分级标准,则可清晰地看到,特斯拉FSD Beta的能力将达到C5(全场景导航辅助驾驶)级别,距“自动驾驶”只剩一级之差。
如何实现从C5到C6的最后一跃?马斯克和Andrej坚信有且只有一条路径:
• 开发专属算法和神经网络架构,在成本、物理尺寸、散热、带宽、延迟等多重制约下,不断提升能效;
• 不断收集数据,优化数据标注方法,提升数据质量;
• 推动GPU和神经网络的成本呈指数下降、单位算力呈指数上升;
• 不断训练神经网络,迭代FSD的能力。
参考文献链接
https://mp.weixin.qq.com/s/Gsubp_cOHylzcFgSB6bZHg
https://mp.weixin.qq.com/s/1kcKd-r9OX0vams4dNMPTQ

