
热门标签
热门文章
- 1[图像处理] 图像降噪算法BM3D(三维块匹配滤波)_视频3d滤波
- 22024年5月系统架构设计师案例分析_2024系统架构师试题分析
- 3【刷题之路】LeetCode 232. 用栈实现队列_请你仅用两个栈实现先入先出队列c语言
- 4常用智能小车直流减速电机选型_mg310电机
- 5云计算大数据之 Java 操作 Kafka
- 6动态规划--凸多边形最优三角剖分_动态规划求凸多边形的最小权值的时间复杂度和空间复杂度
- 7如何写出高质量的年终总结_总结数据支撑
- 8计算机系统:深入解析USB技术,通俗易懂,全面详解!_windows xp usb读写工作原理
- 9Linux C/C++时间操作
- 10【Python】模块导入 ② ( 模块导入语法 | 导入完整模块 | import 导入完整模块 | from 导入完整模块 )_from import导入模块
当前位置: article > 正文
【PID】PID的调整方法_pid三个参数的调整方法
作者:知新_RL | 2024-05-28 04:02:30
赞
踩
pid三个参数的调整方法
一.PID介绍
PID控制器是通过对误差信号e(t)进行比例,积分和微分运算,其结果的加权,得到控制器的输出U(t),该值就是控制对象的控制值。
PID控制器的数学描述为:
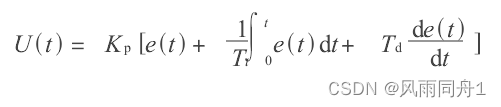
其中的:e(t)=r(t)-c(t)为误差信号。r(t)为输入量;c(t)为输出量;U(t)为控制器的输出;Kp为控制器的比例放大系数;TI为控制器的积分时间常数;Td为控制器的微分时间常数。
二.PID参数介绍
1. 比例系数Kp
比例系数增加时,系统的响应速度会加快,系统的稳态误差则会降低。从而能够提高控制精度。
当比例系数Kp过大,会使系统出现超调量,导致系统发生振荡或使振荡次数增加,以至于系统的稳定性变低,反而延长了调节时间。
当比例系数Kp过小,系统调节将会变得缓慢。
2. 积分时间常数Ki
积分时间常数Ki主要对积分作用的强弱产生影响,其值越小作用越强。
当积分时间常数Ki过大,系统虽然在一定程度上减小了超调量和振荡,但是也会增加系统为了消除静差所消耗的时间。
当积分时间常数Ki过小,便会引起振荡次数增加,导致系统稳定性变差。
3. 微分时间常数Kd
微分时间常数Kd对系统的稳态过程不存在影响,仅在其动态过程中起作用。其值偏大或偏小都会引起系统的超调量的增大,延长调节时间,因此合理的Kd值才能获得比较满意的过渡过程。
三.PID的调整方法
1.响应缓慢,可增大Kp
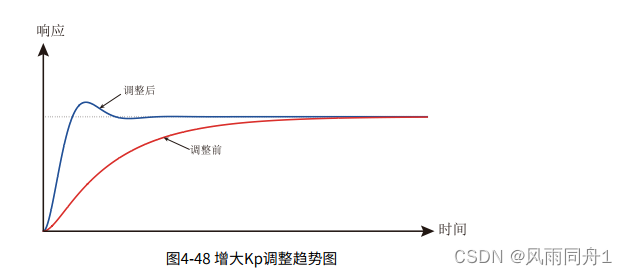
增大Kp调整趋势图
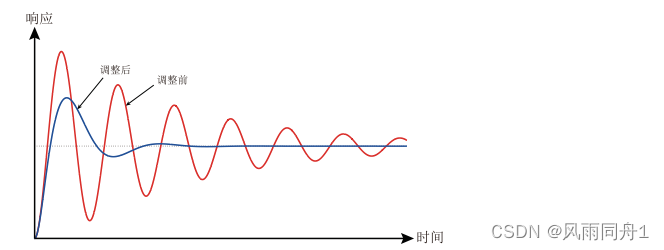
2.快速震荡,可减小Kp
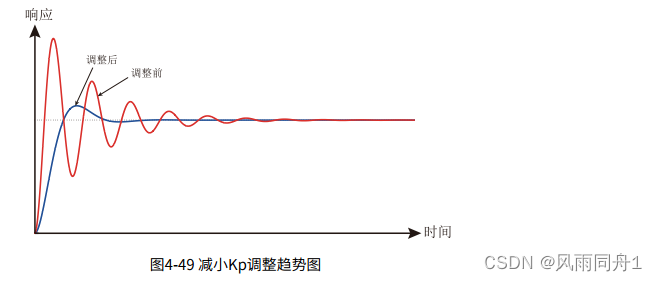
减小Kp调整趋势图
3.超调大,波动慢,可增大Ti
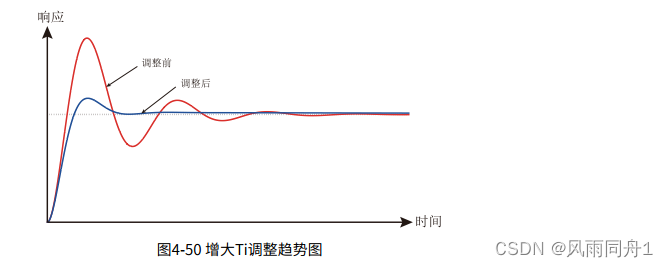
增大Ti调整趋势图
4.负载波动时,静差大,回复慢,可增大Kp或减小Ti

负载波动时,增大Kp调整趋势图

负载波动时,减小Ti调整趋势图
5.加入适量的微分时间Td,可改善系统的稳定性(避免加入过大引入干扰和振荡)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/知新_RL/article/detail/635533
推荐阅读
相关标签

