
- 1chatgpt赋能python:Python选择对话框:简化用户操作的实用工具_python 选择文件对话框
- 2千帆大模型|API调用_千帆大模型 api key
- 3算法力扣刷题 三十一【150. 逆波兰表达式求值】
- 4Docker Desktop - WSL distro terminated abruptly
- 5二进制部署K8s群集+Openebs+KubeSphere+Ceph群集_kubesphere openebs
- 6安全开发基础 -- DAST,SAST,IAST简单介绍_dast iast
- 7FPGA基于AXI 1G/2.5G Ethernet Subsystem实现UDP以太网通信,提供21套工程源码和技术支持_ethernet硬件实现
- 8Anaconda安装scrapy爬虫框架(图文版)_scrapy可以在anaconda里面安装吗
- 9Qualcomm工具_qdart
- 10ELK日志分析平台(三)----kibana数据可视化_kibana的主要功能
KUKA C4和C2控制柜如何修改机器人软限位_库卡机器人软件限位开关
赞
踩
C4控制柜修改方法
C4控制柜修改机器人软限位有两种方式,一种常规的方法是通过HMI的功能选项来修改,另一种是通过机器人配置文件来修改。
通过HMI修改
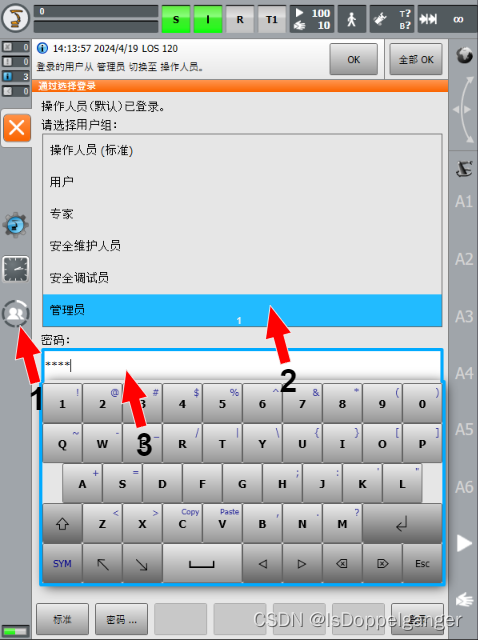
1、使用示教器面板点击登录图标,选择“管理员”登录获取机器人管理权限,默认密码是kuka(小写字母)。
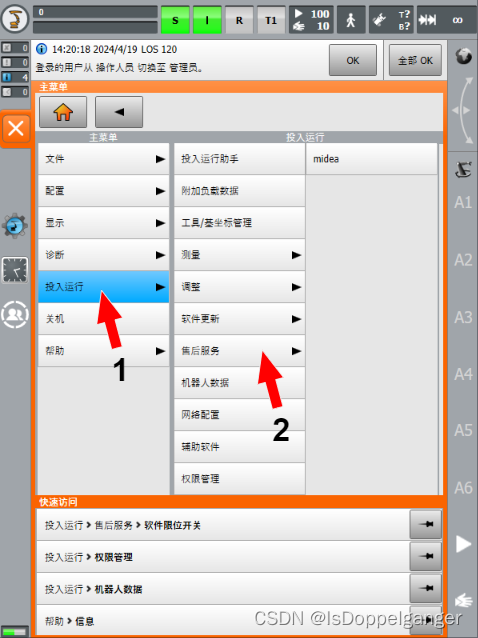
2、点击左上角主菜单图标,依次选择"投入运行"、“售后服务”选项。
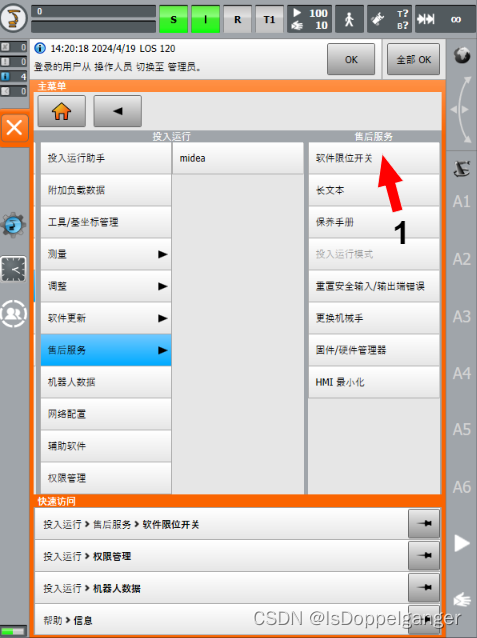
3、选择“软件限位开关”。
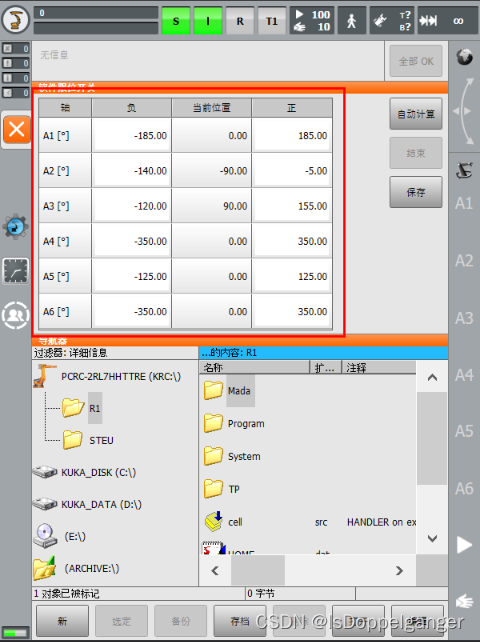
4、根据工作区域大小等实际需要手动修改六个轴,各个轴的软限位数值,点击“保存”即可。“自动计算”不准确,不推荐使用“自动计算”。
通过配置文件修改
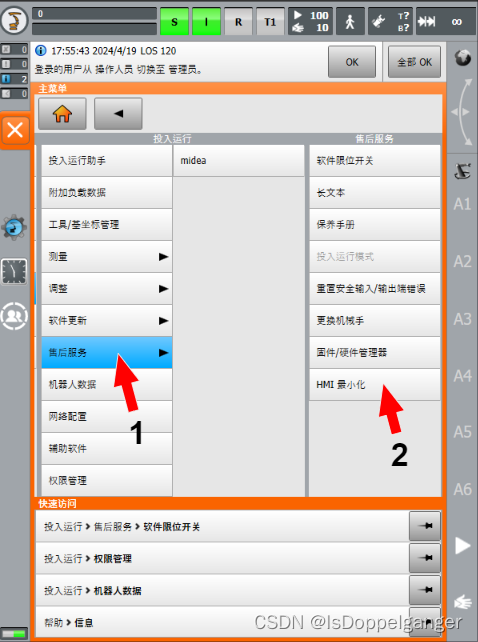
1、把鼠标和键盘连接到C4控制柜PC的USB接口上,方便操作PC的Windows 10系统。点击左上角主菜单图标,依次选择"投入运行"、“售后服务”、“HMI最小化”选项,进入到Windows系统桌面。
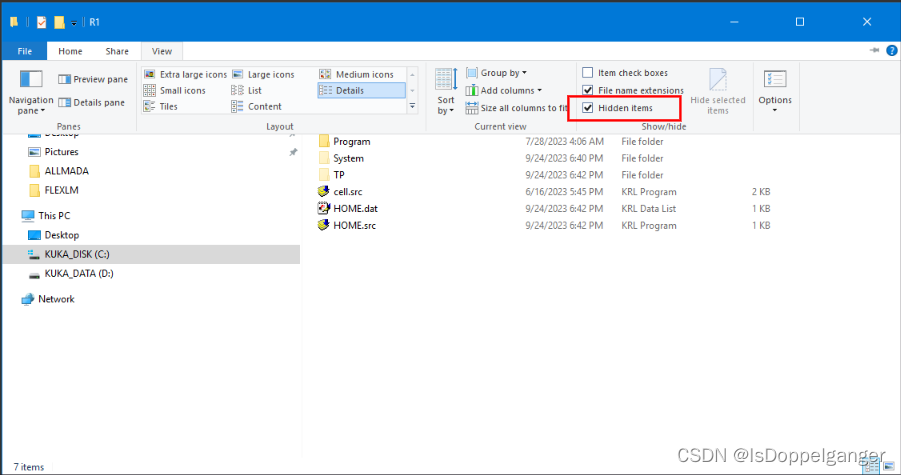
2、打开“我的电脑”,将“Hidden items”勾选

3、打开“C:\KRC\ROBOTER\KRC\R1\Mada”路径,找到$machine.dat文件打开。
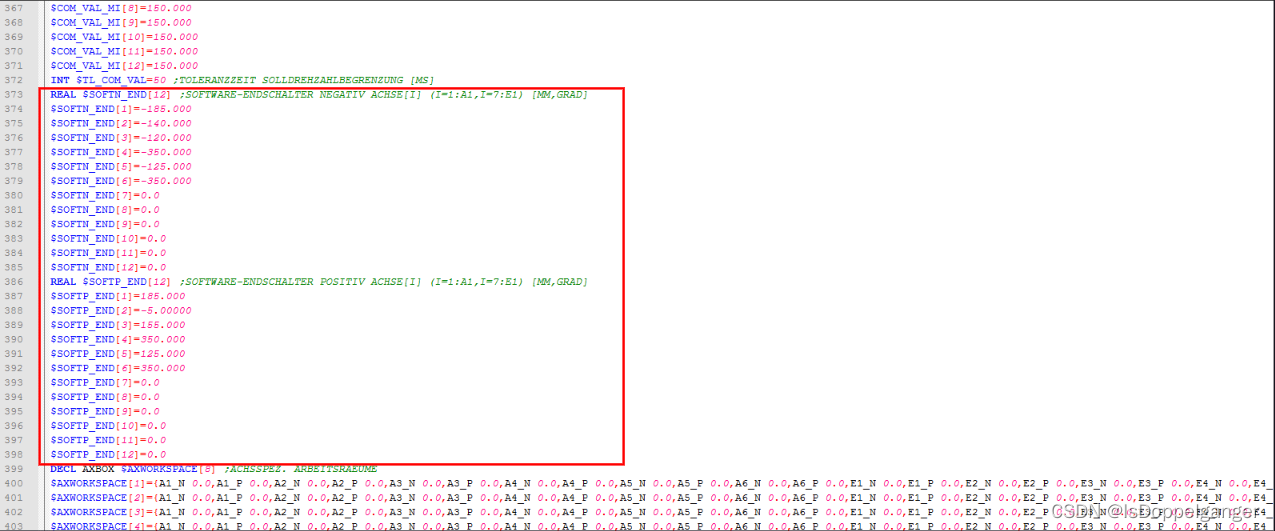
4、“;SOFTWARE-ENDSCHALTER NEGATIV ACHSE[I] (I=1:A1,I=7:E1) [MM,GRAD]”注释的一段数据为机器人六轴的最小软限位值;“;SOFTWARE-ENDSCHALTER POSITIV ACHSE[I] (I=1:A1,I=7:E1) [MM,GRAD]”注释的一段数据为机器人六轴的最大软限位值。根据工作区域大小等实际需要更改各轴软限位的值,保存即可。
重新启动机器人
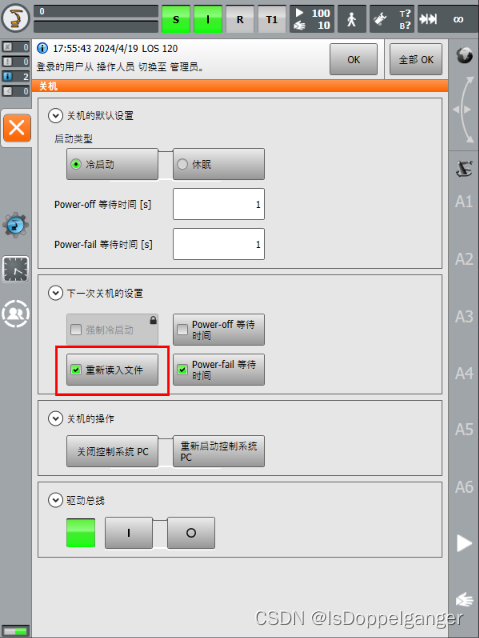
1、点击左上角主菜单图标,选择"关机",勾选“重新读入文件”选项。重启机器人控制柜,使配置文件生效。
C2控制柜修改方法
由于C2控制柜的系统比较旧,示教器HMI操作面板上没有可配置各轴软限位的选项,需要直接修改机器人的配置文件。
通过配置文件修改
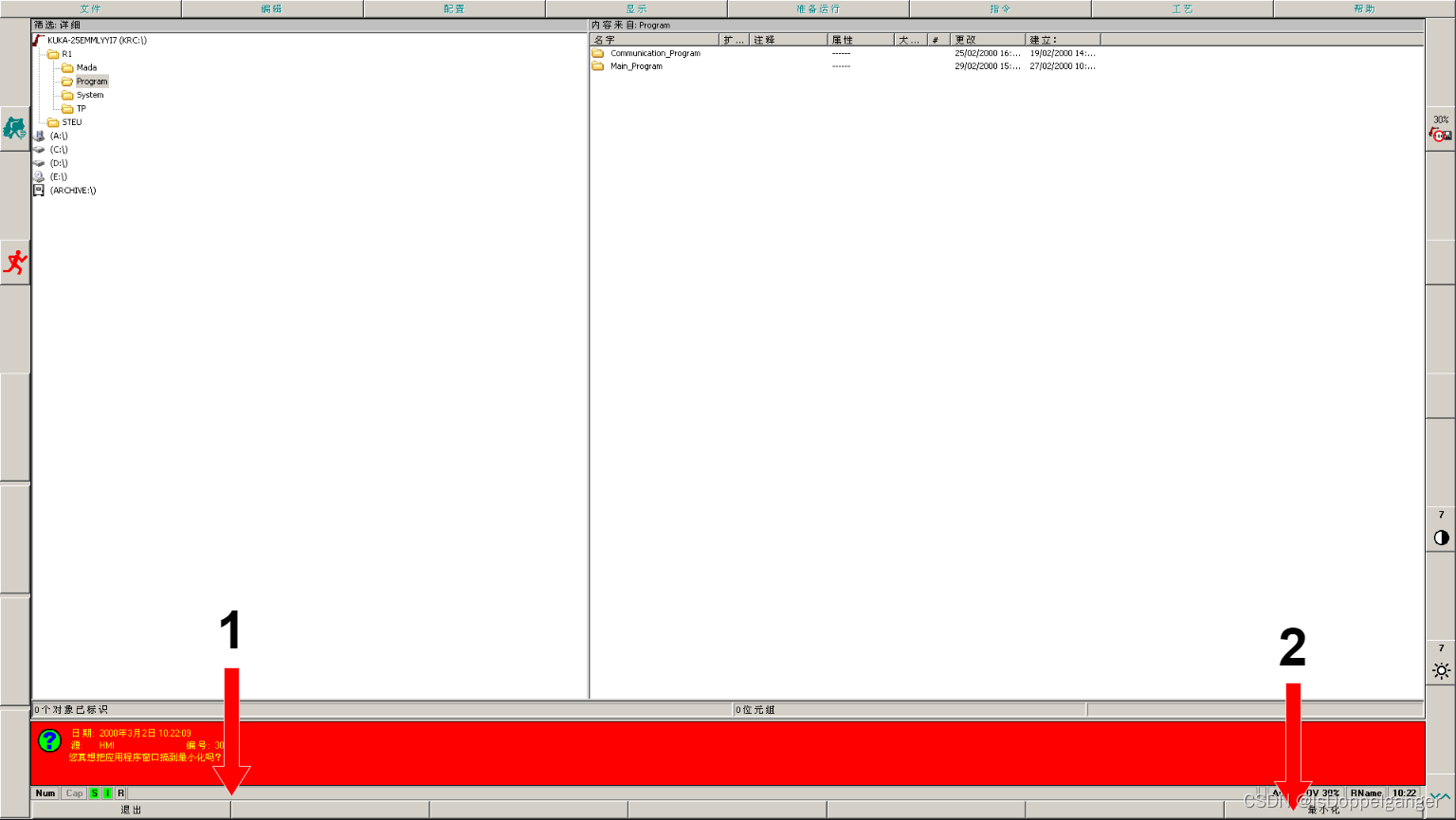
1、把鼠标和键盘连接到C2控制柜PC的USB接口上,方便操作PC的Windows XP系统。鼠标左键单击状态栏,在弹出的对话框中选择“最小化”选项,进入到Windows系统桌面。
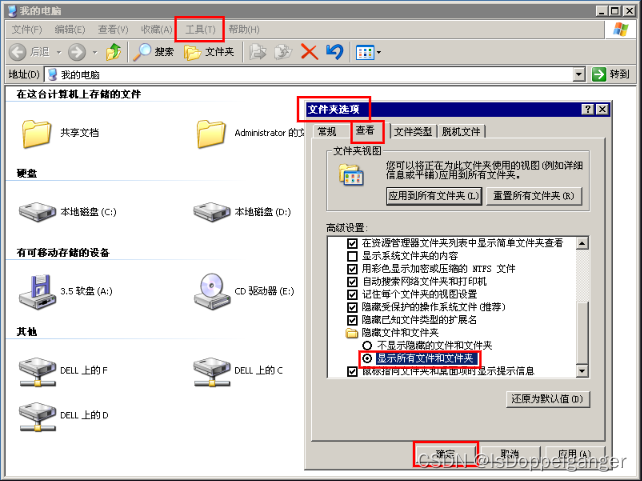
2、打开我的“我的电脑”,依次选择“工具”、“文件夹选项”、“查看”,勾选“显示所有文件和文件夹”,点击“确定”保存配置。
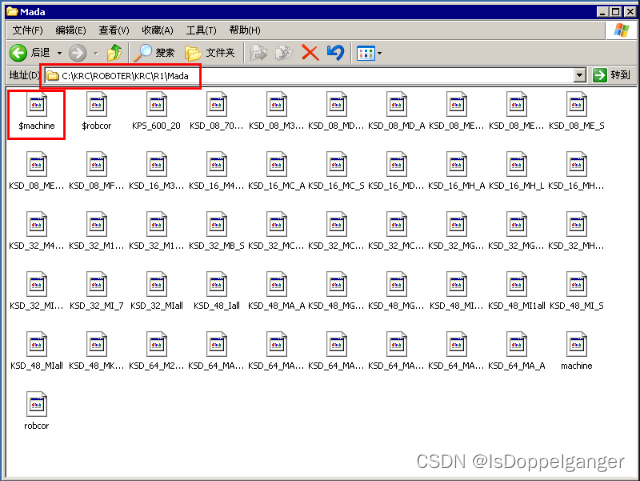
3、打开“C:\KRC\ROBOTER\KRC\R1\Mada”路径,找到$machine.dat文件打开。
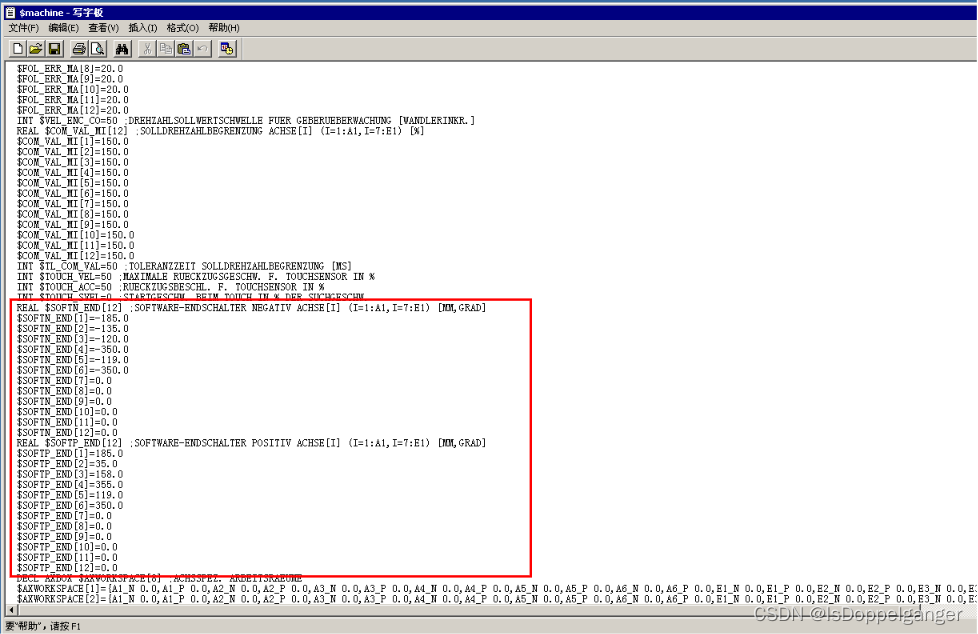
4、“;SOFTWARE-ENDSCHALTER NEGATIV ACHSE[I] (I=1:A1,I=7:E1) [MM,GRAD]”注释的一段数据为机器人六轴的最小软限位值;“;SOFTWARE-ENDSCHALTER POSITIV ACHSE[I] (I=1:A1,I=7:E1) [MM,GRAD]”注释的一段数据为机器人六轴的最大软限位值。根据工作区域大小等实际需要更改各轴软限位的值,保存即可。
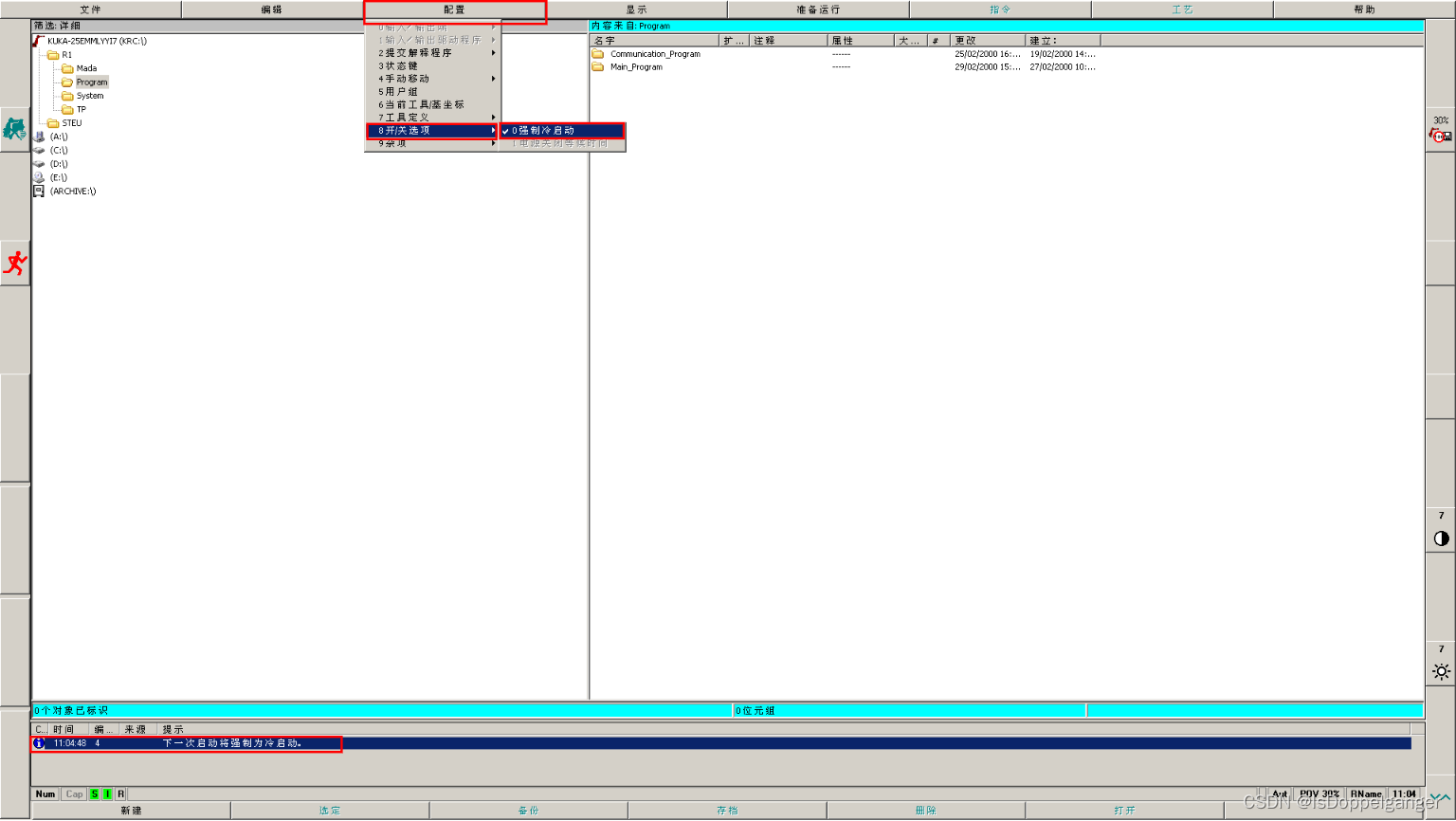
5、打开KUKA HMI 界面,顶部菜单栏依次选择“配置”、“开/关选项”、“强制冷启动”。状态栏会提示“下一次启动将强制为冷启动。”,重启机器人控制柜,使配置文件生效。

