
- 1微信公众号开发之HBuilder和手机模拟器实现扫码功能_hbuilder 小程序 扫一扫
- 2中科院张家俊团队最新综述,谈大模型研究的新领域:多模型协作
- 3一文揭秘利用python+unittest实现Webscoket协议接口测试_怎么批量连接websocket做测试
- 4自动驾驶系列—智能巡航辅助功能中的横向避让功能介绍
- 5【dataframe】将dataframe中的数据保存到csv文件或txt文件中_dataframe保存为csv
- 6准备杭电复试的路上_杭电复试准备
- 7jquery-选择器常见用法
- 8IntelliJ IDEA 2019.2下载插件缓慢或者Plugins加载不出来解决方法_intellij idea 2019.2.3 x64中plugins下的
- 9什么是拉链表
- 10React Native 自定义 Hook 获取组件位置和大小
【自动驾驶传感器融合系列】01自动驾驶中常用的传感器_无人驾驶摄像头性能参数
赞
踩
文前白话
本文简单的介绍应用于自动驾驶系统中的各种传感器,了解其简单的组成、工作原理以及应用等等。
1、Camera
1.1 概述
- 摄像头是自动驾驶核心传感器,实现众多规划、控制的基础相比于激光雷 达和毫米波雷,最大的优势在于可以识别车辆周边环境信息纹理能够 “看到 ”目标的类型、信号灯颜色等,似于人眼睛。
1.2 工作原理
- 摄像头是将光学组件获得的光信号,投射到图像传感器上,完成由光信号到电信号的转换,然后再转换为数字图像信号,最后进行信号的算法处理,从而实现感知车辆周边路况的功能,实现如车辆、行人、车道线、交通标识物的检测、距离估计等模块。
- 摄像头由以下几部分组成:
1)光学组件:也叫镜头组件(lens),是由镜片、滤光片、保护膜等组成;
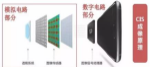
2)CMOS 图像传感器:也叫感光元件,简称 CIS,是模拟电路和数字电路的集成,是摄像头最基础,也是最重要的模块,主要由四部分构成:
◆ 微透镜:具有球形表面和网状透镜,光通过微透镜时,CIS 的非活性部分负责将光收集起来并将其聚焦到彩色滤光片;
◆ 彩色滤光片(CF):拆分反射光中的 RGB 成分,并通过感光元件形成 Bayer 阵列*滤镜
◆ 光电二极管(PD):光电转换器件,将光信号转换为电信号,一般采用 PIN 二极管或者PNV 结器件制成;
◆ 像素设计;通过CIS 上装有的有源像素传感器(APS)实现。一般APS 由3-6 个晶体管构成,将电信号转换为数字图像信号。

- *Bayer 阵列,是一个4x4 的阵列,由 8 个绿色、4 个蓝色、4 个红色像素组成,在将灰度图转换为彩色图时会以 2x2 矩阵进行9 次运算,最终生成一副彩图。该阵列时 CIS 的拍摄彩图的主要技术之一。
- 摄像头在获取数字信号后,通过串行器进行编码,然后通过LVDS 或者其他高效链路,传输到对应的计算平台上,通过对应的解串器进行解码,送入计算单元中进行图像分析。
1.3 摄像头在自动驾驶汽车上的应用
- 根据摄像头的安装位置,可以分为前视、侧视、后视、内置、环视等。在高级别自动驾驶车辆上,配置的摄像头有多个甚至十多个。如特斯拉Autopilot2.0 硬件系统就包含 8 个摄像头。
-
a)前视摄像头
前视摄像头一般布置远距、中距、近距等,安装在前挡玻璃较高的位置,以实现较远的有效检测距离。中距或者远距一般有效检测距离在 90-250m,水平视场角在 60°以下,能够有效的检出行人、车辆、车道线、路岩线、交通信号灯、交通标识牌等。近距离摄像头有效检测距离小于 70 米,水平视场角一般在 70~120°,主要进行车道线、交通信号灯、交通标识牌等。在高级别自动驾驶中,常常会采用三种摄像头搭配的形式进行安装配置。 -
b)侧视摄像头
侧视摄像头一般用于探测车身周围的盲区,盲区的存在,会大大增加交通事故发生的几率。现在车上的盲点检测,就是这个原理。在自动驾驶领域,也出现了使用侧后视摄像头来取代后视镜,避免在危险盲区发生意外。 -
c)后视摄像头
后视摄像头主要用于倒车情况,用于障碍物、行人的检测,以及停车线检测等,实现安全倒车,方便停车入位。 -
d)环视摄像头
环视摄像头一般是采用广角或者鱼眼镜头,用于低速或者超近距离感知,采集车身周围全景拼接,提供车辆四周360°的画面。 -
e)内置摄像头
内置摄像头主要用于驾驶员姿态的监控,针对疲劳、不规范驾驶等危险行为进行预警,内置摄像头需要在全工况下运行(包含暗光、夜晚、逆光等),且不受驾驶员衣着影响。
- 摄像头在 ADAS 中的功能列表
| 功能 | 摄像头类型 | 位置 | 具体功能 |
|---|---|---|---|
| 车道偏离预警(LDW) | 前视 | 单目/双目 | 车辆偏离车道时,发出警报 |
| 前向碰撞预警(FCW) | 前视 | 单目/双目 | 当检测到与前车距离过近时,发出警报 |
| 车道保持辅助(LKA) | 前视 | 单目/双目 | 检测本车道的车道线,当车辆即将偏离时,发出警报 |
| 行人碰撞辅助(PCW) | 前视 | 单目/双目 | 监测前方道路的行人,并在可能发生碰撞时发出警报 |
| 交通标志识别(TSR) | 前视 | 单目/双目 | 识别车辆前方道路两侧的交通标志 |
| 盲点监测(BSD) | 侧视 | 广角 | 监控车辆盲区内障碍物 |
| 泊车辅助(PA) | 后视 | 广角 | 泊车或倒车时,预测出倒车轨迹,辅助倒车 |
| 驾驶员注意力监测(DM) | 内置 | 广角 | 安装在车内部,监测驾驶员开车状态 |
| 360 环视(AVM) | 前侧后 | 鱼眼/广角 | 利用车辆前后的摄像头获取图像进行拼接,输出车身周围全图 |
- 1.4 车规级摄像头性能要求
所谓的车规级,就是需要满足车辆零部件资格和质量体系标准,目前汽车行业适用的标准为ISO/TS 16949 和 ISO26262。前者是以ISO9001:2008 标准为基础,确立针对汽车相关产品的设计和开发、生产以及相对应的安装与服务的质量管理体系要求,适用于整个汽车供应链的组织;后者是一项国际标准,是从电子、电气以及可编程器件功能安全基本标准IEC61508 衍生出来的,定位在汽车行业中特定的电气器件、电子设备、可编程电子器件等专门的汽车零部件,旨在提高汽车电子、电气产品功能安全的国际标准。通俗的说法就是16949 用于规范一般的汽车零部件供应商的质量管理体系,26262 用于车用电子、软件企业的电气产品功能安全的国际标准。
针对车规级的摄像头,因为车辆全天候全天时的运作,对光线、温度的变化都有较高的要求(如进出隧道等明暗反差过大的场合,北方冬天极寒场景等),且能够满足车辆震动的要求,所以要求自动驾驶中摄像头主要需要满足:
- 1)耐高温:车载摄像头需要在-40℃-85℃范围内都能够正常工作,且能够适应温度的剧烈变化;
- 2)抗震:车辆在路面行驶时会产生较强的震动,所以车载摄像头必须能抗各种强度的震动;
- 3)防水:车辆需要在全天候全天时工况下运行,就需要摄像头密封严实、满足在雨水中浸泡仍可正常使用;
- 4)使用寿命:车载摄像头的使用寿命至少 10 年;
- 5)高动态低噪点:车辆需要在全天候全工时状态下运行,摄像头面对的光线环境变化剧烈且频繁,所以要求摄像头的 CMOS 具有高动态性;在光线较暗时,能够有效的抑制噪点的产生;
- 6)对于某些特定功能的摄像头,如侧视摄像头、环视摄像头等,还需要水平视场角比较广。
- 1.5 摄像头的优劣势分析
- 相比于毫米波雷达,摄像头能够对目标类别进行准确的识别,对车道线(路沿)、红绿灯、交通标志准确的识别,同时还能够检测出车辆行驶的安全边界,对横向移动的目标具有很强的探测能力(十字路口横穿的行人、车辆进行探测和追踪)。
- 相比于激光雷达,其廉价的成本,精准的交通标识和信号灯的识别等都是激光雷达无法比拟的。
- 但摄像头受天气、光照影响较大,在极端恶劣天气下视觉传感器就会失效;且视觉测距、测速性能远比不上激光雷达和毫米波雷达。
- 1.1.6 摄像头关键参数
在选择摄像头时,一般参考如下几个参数指标:有效的探测距离,水平视场角,垂直视场角,分辨率,最低照度(CMOS 对环境光线的敏感程度),信噪比(输出的信号电压和噪声电压的比值),动态范围(正常显示细节的最亮和最暗物体的亮度值所包含的那个区间)。
2、激光雷达(Lidar)
2.1.1 概述
- 激光雷达(Lidar),全称Laser Detecting and Ranging,即激光探测和测距,是一种用于精确获得三维位置信息的传感器,可以确定目标的位置、大小、外部轮廓等。与毫米波雷达工作原理相似,激光雷达通过发射和接收激光束,获取空间的位置点信息(即点云),并根据这些信息进行三维建模。
除了获取位置信息外,激光信号的反射率还可以区分目标物质的不同材质,激光雷达的线束越多,其测量精度越高。由于激光的频率高,波长短,可以获得极高的角度、距离和速度分辨率,这就意味着可以利用多普勒成像技术,构建出清晰的3D 图像。
2.1 工作原理
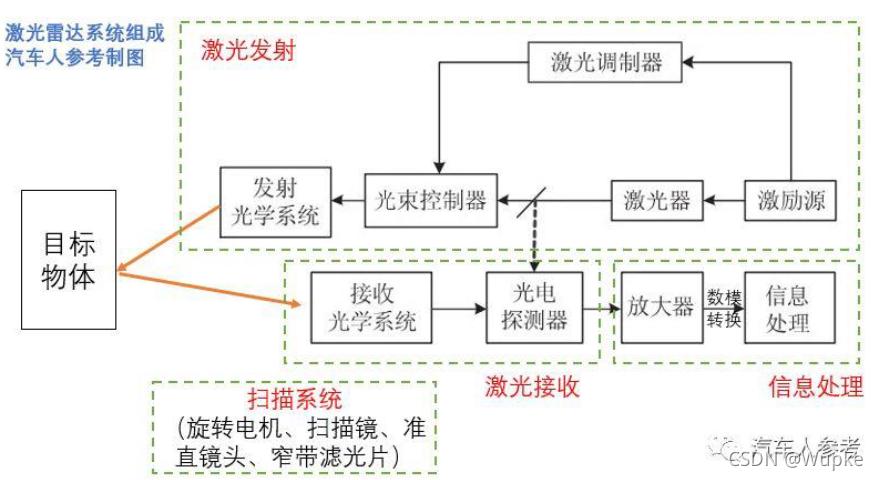
激光雷达一般包括发射系统、接收系统、信息处理三大部分组成,部分激光还包括扫描系统。
- 1)发射系统:包括激励源、激光器(也叫激光二极管)、光速控制器(包括透镜、反射器件、衍生器件,具体表现为准直镜、分束器、扩散片)等;由激励源周期性地驱动激光器,发射激光脉冲,激光调制器通过光束控制器控制发射激光地方向和线数,最后通过发射光学系统,将激光发射到目标物体;
- 2)接收系统:包括光电探测器、接收模块(包括透镜、分束器、窄带滤光片)等硬件;目标物体反射回来的激光,经过接收系统,将其汇集到探测器的光敏面后,传递给光电探测器,然后将光信号转化为电信号;
- 3)信息处理:包括放大器、数模转换器以及软件算法等;主要用来接收转换后的电信号经过放大处理、降低噪声和干扰后,进行数模转换,由信息处理系统计算,获得目标表面形态、物理属性等特性,最终建立物体模型;算法大体分为三类:点云分割算法、目标跟踪与识别算法、即时定位与地图构建算法等;
- 4)扫描系统:以稳定地转速旋转起来,实现对所在平面地扫描,并产生实时地平面图
信息,主要由电机、扫描镜、MEMS 微型谐振镜、相控阵等组成(Flash 中不包含扫描系统)
- 激光雷达是向目标发射激光探测信号束,然后将收到的从目标反射回来的信号(目标回波)与发射信号进行比较,测量发射信号与接收信号地时间差或者相位差,获得目标的距离信息,然后通过水平旋转扫描来测量角度,建立二维极坐标系,然后通过不同的俯仰角度信息,获得目标的高度信息等,从而完成对目标的探测、跟踪、识别。下图可以反映出激光雷达的组成:
激光雷达的测距有两种,一种是基于时间的测量方法,也叫飞行时间法(TOF),另一种是不基于时间的测距法。
- 基于时间的测量方法又分为脉冲法和三角法两种。
1)脉冲法,也称为直接法,数学模型如下:距离 = 光速 * 往返时间 / 2
2)三角法,也叫间接法,如下图:
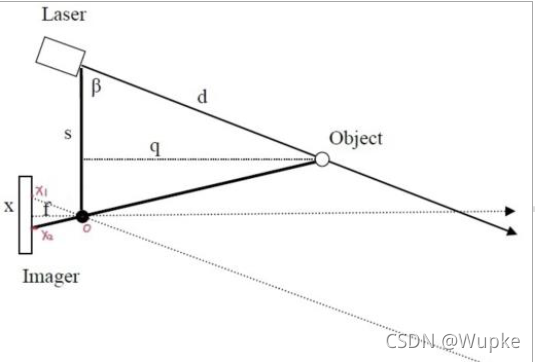
-
激光雷达发射器发射激光,经过物体(object)反射后被Imager 捕捉,假设捕捉点为
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/空白诗007/article/detail/860276
Copyright © 2003-2013 www.wpsshop.cn 版权所有,并保留所有权利。

