
- 1使用ffmpeg从视频中提取纯音频&纯视频_ffmpeg提取音频
- 2网络基础——ACL和NAT介绍_nat acl
- 3UPLOAD_ERR_upload.err
- 4openVPN搭建,安装,使用
- 5nvm常用命令有哪些?nvm如何切换node版本?nvm如何下载node?nvm安装包_nvm下载node命令
- 6批量爬取Google Trends的日频数据,实现EXCEL实时存储_turraqzez27cdacdrs6ws49jplpbj23pf5
- 7Python爬虫——多线程爬虫如何实现?_爬虫线程怎么用
- 8Vue Element table表格实现表格数据动态滚动(无限滚动)_element table 动态无限滚动
- 9elementui el-table表格自动循环滚动_element table滚轮
- 10ssh连接时提示THE AUTHENTICITY OF HOST XX CAN'T BE ESTABLISHED
一文了解三种3D视觉技术
赞
踩
来源丨ACT视觉系统设计
点击进入—>3D视觉工坊学习交流群
与2D技术相比,3D图像处理可以为计算机视觉用户提供更多的图像信息,让更多的行业和应用受益,尤其是工厂自动化、机器人、物流以及医疗领域。目前市面上有多种3D技术路线,我们对ToF (Time-of-Flight)、双目视觉、结构光这三种技术展开分析,帮助你了解其各自的特点及应用。
1
\ ToF (Time-of-Flight)/
ToF是一种非常有效的技术,可用于测量距离以获得深度数据。集成在相机中的光源可发出光脉冲照射到物体上,物体将光脉冲反射回相机。根据光脉冲所需的时间,可以确定被测物每个点与相机的距离信息,从而得到深度值。因此,被检测物体的3D值会以范围图或点云的形式输出为一张空间图像。除此之外,ToF还能为每个像素以灰度值的形式提供2D强度图像,以及可表示单个值置信度的置信度图。

使用ToF进行3D采集时,基本不受物体的强度和颜色的影响,也无需边缘标定、转角等功能设置,因此可以轻松使用图像处理技术将其与背景分开。该采集过程也适用于移动的物体,每秒最多能执行900万次距离测量,精度可达毫米级。与其他3D相机相比,ToF相机更为经济、精巧和简单,可实现轻松安装和集成。
不过,ToF相机仅在特定环境条件下和定义的测量范围内,才能提供理想的采集结果。这是由于ToF相机采用底层的ToF测量方法,在测量物体的角落或凹形面时,发射光会进行多次反射,导致ToF方法的测量结果出现偏差。离相机太近的高反射表面会导致镜头中出现杂散光,从而产生伪影。而对于非常暗的表面,由于反射光太少,存在无法进行可靠测量的风险。工作距离太小也会对ToF方法造成限制,所以它总体上适用于测量范围广、对精度要求适中的应用场景。
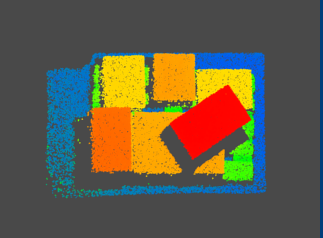

在托盘中的包装用伪色显示的3D点云
2
\ 双目视觉 /
双目视觉的工作原理与人眼类似。其3D原理是使用两台2D相机从不同视角拍摄同步的图像,从而获得深度信息。为了计算3D数据,必须知道两台相机之间的相对位置(外部参数)。此外,还需要获得有关每台相机的内部参数信息,例如镜头的光学中心和焦距等,这些信息共同决定了特定于相机的校准值。为了计算深度信息,首先需要校正两个2D相机拍摄的图像,然后使用适配算法在左右图像中搜索相应的像素,最后借助校准值,就可以将场景或物体的深度图像生成为点云。此过程中的最佳工作距离具体取决于两台相机的距离和设置角度,因此会各不相同。
对于结构简单的表面,由于双目视觉方法在两个图像中拍摄到的相应特征不足,因此无法从中计算出三维信息,用户可以通过搭配结构光克服这些限制。

3
\ 结构光 /
与双目视觉技术不同,结构光技术需要将其中一台相机替换为条纹光投影仪。它会投影具有正弦强度曲线的各种条纹状图案,从而在表面上创建系统已知的人造结构。在表面上投影的条纹变形可用于计算3D信息,并获得更准确的测量结果。
具备结构光功能的芯片在近距离内可实现较高的精度。使用结构光方法时会产生很高的计算负载,它需要逐张采集和分析多个图像,不适用于移动的物体。综上,它仅适用于有限范围内的实时应用,否则需要投入更高的成本。
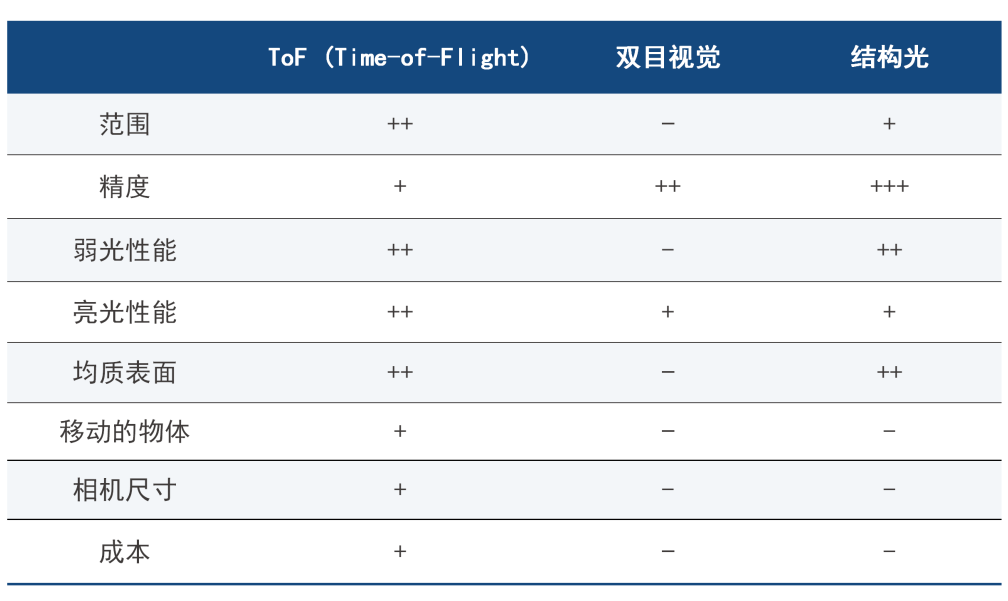
// 三者优劣势分析 //
典型应用
1
\ 典型ToF应用 /
在工作距离长、测量范围大、高速运作以及系统复杂性低的应用中,ToF技术尤其可以发挥所长,而极高的精度则不是重要的考虑因素。
● 测量物体(体积、形状、位置、方向)
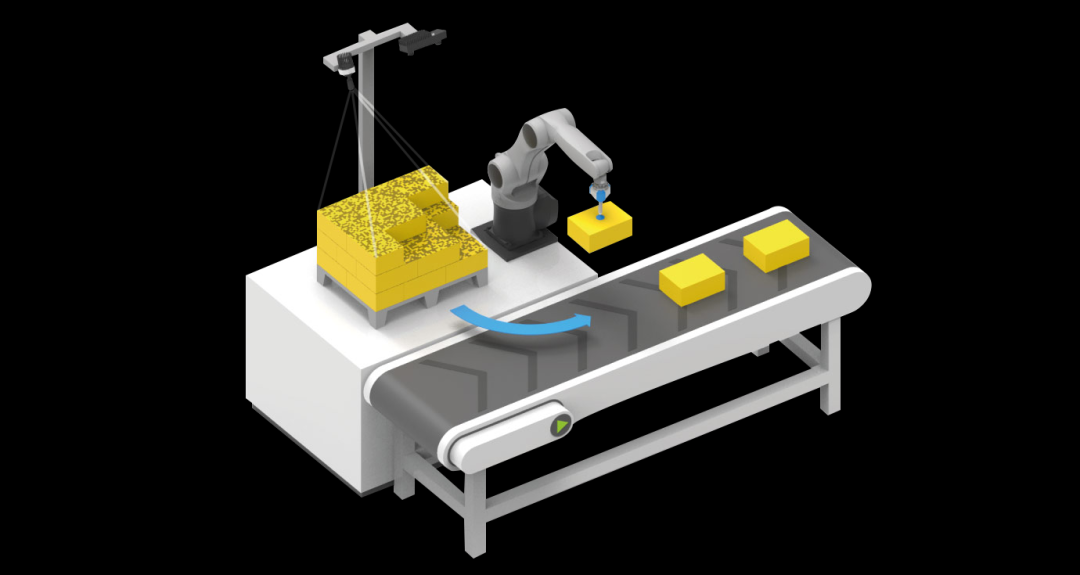
● 工厂自动化:查找、拾取、组装物体;检测损坏的物体或堆垛错误
● 机器人:确定机器人的拾取点;传送带上的抓取任务、箱盒取物、拾取与放置
● 物流:包装、堆垛、打(拆)托盘、打标签、自动驾驶车辆(导航、安全警告)
● 医学:病人的定位和监测
2
\ 双目视觉和结构光的典型应用 /
双目视觉技术可以提供较高测量精度,而具备结构光功能的相机性能更胜一筹。这些类型的3D相机适用于检测结构较少的平扁表面,或需要实现较高测量精度的应用。
● 确定位置和方向
● 对物体进行高精度测量(体积、形状、位置、方向)
● 机器人:箱盒取物、导航、防撞、装货和卸货服务
● 物流:室内车辆导航、机器的装卸、打(拆)托盘
● 户外:测量和检测树干
● 损坏检测等组件检测

目前,结合深度学习或人工智能的3D技术受到了越来越多应用的青睐。这种技术交互使得物体识别以及精确确定物体在空间中的位置变得更轻松,所以机器人现在能够抓取以前无法抓取的物体。而同步定位与地图构建(SLAM)系统使用视觉芯片来创建高分辨率的三维地图,同样适用于自动驾驶汽车和增强现实应用方面。

转自:Basler计算机视觉
本文仅做学术分享,如有侵权,请联系删文。
点击进入—>3D视觉工坊学习交流群
干货下载与学习
后台回复:巴塞罗那自治大学课件,即可下载国外大学沉淀数年3D Vison精品课件
后台回复:计算机视觉书籍,即可下载3D视觉领域经典书籍pdf
后台回复:3D视觉课程,即可学习3D视觉领域精品课程
3D视觉工坊精品课程官网:3dcver.com
1.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
2.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
3.国内首个面向工业级实战的点云处理课程
4.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
5.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
6.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
7.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
16.透彻理解视觉ORB-SLAM3:理论基础+代码解析+算法改进
重磅!粉丝学习交流群已成立
交流群主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、ORB-SLAM系列源码交流、深度估计、TOF、求职交流等方向。
扫描以下二维码,添加小助理微信(dddvisiona),一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿,微信号:dddvisiona
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看,3天内无条件退款

高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

