
- 1(十九)unity shader之——————基于物理的渲染技术(PBS):中篇(Unity 5中的Standard Shader的实现和使用)_unity的standard
- 2phpmyadmin登录后显示“phpMyAdmin 高级功能尚未完全设置,部分功能未激活。查找原因...。”错误提示...
- 3Node.js 文件系统
- 4Python 绘制混淆矩阵函数 confusion_matrix_plot_confusion_matrix函数
- 5wps 设置excel某些单元格保护不可编辑_wps 禁止填写某个单元格
- 6Unity中将3D模型显示在UI上或者显示在UI前面_unity urp让物体显示在ui层
- 7云计算运维 · 学习笔记 · 第一阶段 · 网络基础_云运维学习内容
- 8Linux系统查看系统运行时间的方法_linux查看系统启动时间
- 9我的第一个作业_videozm whqhyg com8091
- 10Unity Metaverse(六)、关于Avatar换装系统的示例工程_换装 开源
超声波雷达介绍及车位探测信号处理方法_雷达探测车位的原理是什么
赞
踩
1、超声波雷达介绍
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。
特性一:温度敏感
特性二:无法精确描述障碍物位置(接收到的只是距离,并不知道具体方向)
雷达探测范围数字模型:
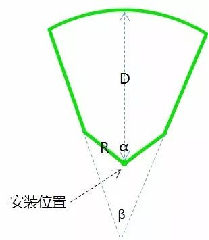
参数α:超声波雷达的探测角
参数β:检测宽度范围影响因素之一,UPA的β角为20°左右,APA的 β角比较特殊,为0°。
参数R:检测宽度范围影响因素之一,UPA和APA的R值差别不大, 都在0.6m左右。
参数D:超声波雷达的最大量程。UPA的最大量程为2米~2.米,APA 的最大量程至少是5米,目前已有超过7m的APA雷达在业内使用
2、车位探测超声波雷达装载方案
汽车超声波类装配方案多为前后向共8个UPA,左右侧共4个APA。UPA主要应用于车前后障碍物检测,APA主要应用于车侧障碍物检测。工作频率:48kHz+2kHz

在车位探测中,主要是左右侧共4个APA其探测作用。
3、车位识别技术

车位检测基本原理:汽车经过空车位时,传感器检测到的距离值会发生两次跳变

技术难点:
1、测出的车位长度不稳定
2、室内室外测量差异较大
3、车速、车身角度对测量结果也会造成影响
4、参考方案
(1)Hough Transform for Parking Space Estimation Using Long Range Ultrasonic Sensors(2006)

1、Find the strongest line
2、Select all line with the same or nearly the same θ as the strongest line found above
3、Pick the two strongest lines out of the selection
(感觉并不能满足要求,但其应用huogh transform 找到的两条线也许能为信号降噪提供思路)
(2)Parking Space Detection Using Ultrasonic Sensor in Parking Assistance System(2008)

R2 -R1 >Threshold :Edge
R2 -R1 Threshold : Plane
(其采用的是多回波超声波,依据回波的差值判断探测范围是否是平面或者边缘)
(3)联创汽车(2017)
1、联创开发的自适应滤波算法,优化信号输入。
2、搭建车位识别补偿模(Compensation module)。
3、对已有的波形进行分类计算后,对车位状况进行分类。
(该方法基本满足需求,但技术细节未公开)


