
- 1k-means聚类算法详解_kmeans算法_简述k-means聚类分析的基本步骤
- 2Docker入门教程和常用命令_docker菜鸟教程
- 3字节推出了“扣子”,国内版的Coze,但是我不推荐你用!_coze国内可以用吗
- 4矢量切片——集美貌与才华于一身的底图方案_矢量地图瓦片可以动态切换不同语言标注
- 5Kafka 如何保证消息顺序及其实现示例
- 6PySpark:结构化流_pyspark流模型
- 7yolov7 多卡训练显示torch.distributed.elastic.multiprocessing.errors.ChildFailedError:
- 8android studio修改包名_androidstudio 修改包名
- 9git报错(Another git process seems to be running in this repository, e.g.an editor opened by ‘git com)_may have crashed in this repository earlier: remov
- 10【观察】华为云在容器软件市场拿了中国第一,凭什么?
光谱空间特征提取用来高光谱图像分类:维度约减和深度学习方法_光谱空间特征堆叠
赞
踩
免责声明:本文仅代表个人观点,如有错误,请读者自己鉴别;如果本文不小心含有别人的原创内容,请联系我删除;本人心血制作,若转载请注明出处
本文出处:本博客是看完这篇文章后的学习笔记。

摘要
1、本文提出了一种光谱-空间特征分类框架:分别用维数约减和深度学习方法进行光谱和空间特征提取。
2、一种平衡局部判别嵌入算法被提出用来从高维高光谱数据集中进行光谱特征提取。
3、CNN被用来发现空间相关特征在高层次上。
4、然后,融合特征通过堆栈光谱和空间特征一起提取。
5、基于多特征的分类器用来进行图像分类。
引言
1、基于传感器技术的提高,在光谱和空间域的高分辨的更准确地和及时的卫星成像可以轻易获取。
2、这些应用需要用一小部分训练样本得到每一个像素的样本。
3、但是在光谱和空间分辨率都提高的情况下很难得到较高的分类正确率。
4、两个因素影响分类正确率:①、高维光谱信息产生Hughes现象,显著降低分类正确率,不同的物体分享相似的光谱特性,使得HSIs(高光谱图像)很难利用光谱信息分类; ②、空间分辨率的提高也很影响分类正确率,特别是高分辨图像会提高组内变异性和降低组间变异性在光谱和空间域。
5、引入在架构和上下文信息在空间域很重要。
6、维数约简是要找出HSIs的低维表示而不是要用所有的波段进行数据处理。
7、维数约简可以有效地找到子空间和解释特性。
8、典型的基于光谱分析的维数约简算法可以分为无监督和半监督算法。无监督约减算法可以不使用标签信息揭露低维数据结构,例如PCA,局部线性嵌入,邻域保留嵌入,然而,在HSIs分类中,除了包含全局共同信息,每一类的判别投影需要探索;有监督维数约减方法试图通过使用标记的样品获悉保持同一类中的数据点靠近,而分离不同类别的数据点,例如,线性判别分析(LDA),非参数加权特征提取(NWFE),局部Fisher判别分析(LFDA),局部判别嵌入(LDE)。LDA试图找到更好的投影去增大类间距离和降低类内距离;NWFE使用决定边界的训练样本引入了非参数散射矩阵;LFDA通过分配临近的样本更大的权值的方式延伸了LDA;LDE试图找到最好的投影去增大类间散射矩阵,通过远离在图嵌入框架中的邻近的不同类的数据点。
9、然而,在HSI图像中,特别是高空间分别率的图像,光谱信息在类内比较相似,类间区别也并不大。
10、为解决类间信息的相似性问题,我们提出了均衡LDE(BLDE)算法,即用均衡目标来考虑类内准则和类间准则在一个图嵌入框架中,提高类间的可分性。尽管BLDE可以有效地将光谱信息投影到低维表示,但是它并不能分别具有相同光谱特性的不同样本,因此,空间特征经常与光谱特征一起进行HSI分类。
11、空间特征被证明在HSI的数据表示中是很有效的,也可以提高分类正确率。
12、提取遥感图像的空间特征经常需要预先设定的空间滤波参数,这个参数一般是根据研究人员的对问题的知识和性能:灰度共生矩阵,小波架构,几何图像特征,Gabor架构特征,扩展形态特征(EMPs),属性总则。这些特定特征是特定的,即特定形式的的物体可以被参数设置检测到。
13、然而,空间特性显示了显著不同在低层次上,使得仅仅依靠经验参数不可能去描述所有物体的类型。
14、不是利用手工制造特征,深度学习可以自动的产生高层次空间特征,显示了高度抗噪和有效性在图像分类中。
15、SAE可以提取深度特征从分层结构中,训练样本被强制转换成一维的来满足SAE的输入需求,但是这样会破坏原图像可能含有的空间信息。
16、Chen et al. 基于2D架构提取方式提出了CNN,在高分辨率图像中来检测车辆,有两个缺陷。第一,遥感图像中的物体在不同尺度上,固定检测窗口不能发现在形体上具有显著不同的物体;第二就是,它忽略了空间信息,这对于遥感图像处理是不好的。
17、空间特征通过训练CNN在源数据集上的少数主成分波段。特征融合技术用来产生光谱空间特征。最后分类器在基于光谱空间特征上训练。
18、SSFC如下所示:对于HSI分类,CNN-based空间特征提取方法被提出。1)、相比于传统手动特征,提取的深度学习架构特征更抗噪和有效;2)、提出的BLDE可以平衡散射特征的局部性保留和类间散射特征来获得更好的判别投影;3)、基于CNN的空间信息结合光谱特征可以更好的揭示源数据包含的固有属性。
框图可以分成两部分,在第一步中,光谱和空间特征被分别提取。对于光谱特征,维数约简方法经常被用来降低光谱维度;特别是BLDE算法被用来发现HSI图像的低维表示;CNN框架被用来在高层次上自动提取空间相关深度特征。然后,提出的光谱空间特征可以通过结合基于BLDE的光谱特征和基于CNN的空间特征。最后,结合特征被输入到线性分类器中,得到分类结果。

提出的方法--光谱域BLDE
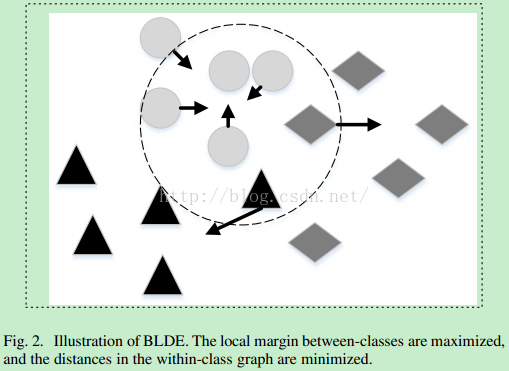
1、为了获取光谱域特征,我们提出了BLDE方法。它继承了传统LDE的优势:估计一个线性投影,同时最大化不同类之间的局部边缘,并且使类间样本保持接近。即它可以克服有限训练样本的奇异点(噪点),如图2所示。
2、假设有M个有标签样本




Gb的密切矩阵Wb可以被定义为:

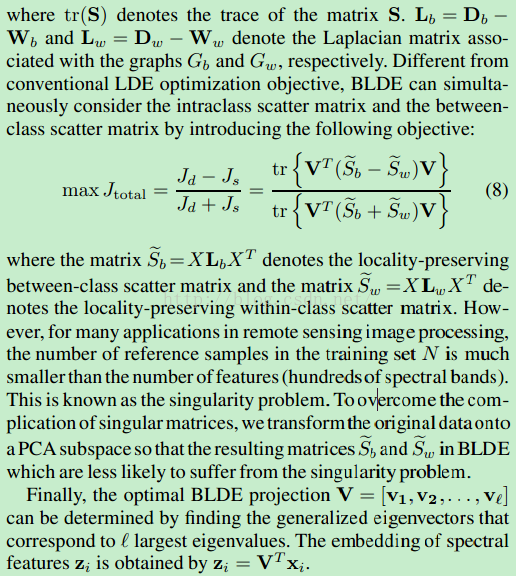
t是高温核参数。BLDE计算了一个线性变换V同时最大化类间样本的局部边缘(3)和最小化类内样本的距离(4)在光谱空间。数学表达式为:

(3)和(4)的优化问题可以被转换成迹模式。对于类内样本,条件可以毕诗为:

类间标准,优化问题可以转换为:

tr(·)代表矩阵的迹,X代表数据矩阵,

提出的方法--CNN框架
1、CNN--一般由卷积层和池化层构成,紧跟着全连接层,如图三所示

2、用CNN提取空间特征,如图4所示

输入层是取ground-truth的固定邻域作为输入(patches),Si是M个输入样本,i∈(1,...,M),ti代表与此相对应的标签。

